Enertronica Santerno SINUS PENTA User manual

•15W0102B500 •
SINUS PENTA
PENTA MARINE
IRIS BLUE
SOLARDRIVE PLUS
USER MANUAL
- Motor Drives Accessories -
Issued on 05/06/2019
R.01
Issued on 01/10/2015
R.07
Enertronica Santerno S.p.A.
Via della Concia, 7 –40023 Castel Guelfo (BO) Italy
Tel. +39 0542 489711 –Fax +39 0542 489722
santerno.com [email protected]om
•This manual is integrant and essential to the product. Carefully read the instructions contained herein
as they provide important hints for use and maintenance safety.
•This device is to be used only for the purposes it has been designed to. Other uses should be
considered improper and dangerous. The manufacturer is not responsible for possible damages caused
by improper, erroneous and irrational uses.
•Enertronica Santerno S.p.A. is responsible for the product in its original setting.
•Any changes to the structure or operating cycle of the product must be performed or authorized by
Enertronica Santerno S.p.A..
•Enertronica Santerno S.p.A. assumes no responsibility for the consequences resulting by the use of
non-original spare-parts.
•Enertronica Santerno S.p.A.reserves the right to make any technical changes to this manual and to
the product without prior notice. If printing errors or similar are detected, the corrections will be included
in the new releases of the manual.
•The information contained herein is the property of Enertronica Santerno S.p.A. and cannot be
reproduced. Enertronica Santerno S.p.A. enforces its rights on the drawings and catalogues according
to the law.
E n g l i s h
MOTOR DRIVES
ACCESSORIES
USER MANUAL
2/312
REVISION INDEX
The following subjects covered in this User Manual (ID number 15W0102B500,revision R.01) have been
added, changed or suppressed with respect to the previous version of this User Manual (ID number
15W0102B500, revision R.00).
The ENERTRONICA GROUP logo has been added.
The nameplates for BU200 and BU600 have been edited.
A note reading “Decisive voltage class C according to EN 61800-5-1” has been added for BU600.
The operating conditions of the available Braking Resistors have been made clearer.
IP23 Box Resistors, 4 kW to 64 kW: Part Numbers have been split between 1 kV and 3 kV.
The NEMA 1 GLANDKIT section has been added.
Input inductors: a note concerning the dedicated transformer featuring Vdc=5% or higher has been added.
The Output Toroidal Filters section has been added.
Option Boards For Fieldbus (Slot B): compatibility to firmware version has been added.
Option Boards For Fieldbus (Slot B): CClink and Powerlink removed (not available).
The meaning of the LEDs for each field bus has been made clearer in Status LEDs on the B40 Series
Boards.
The BRIDGE MINI (SLOT B) section has been added.
The ES851 Datalogger Board (SLOT B) has been removed.
In ES847 I/O Expansion Board (Slot C), inputs XAIN1, XAIN2, XAIN3, XAIN6 have been removed (not
available).
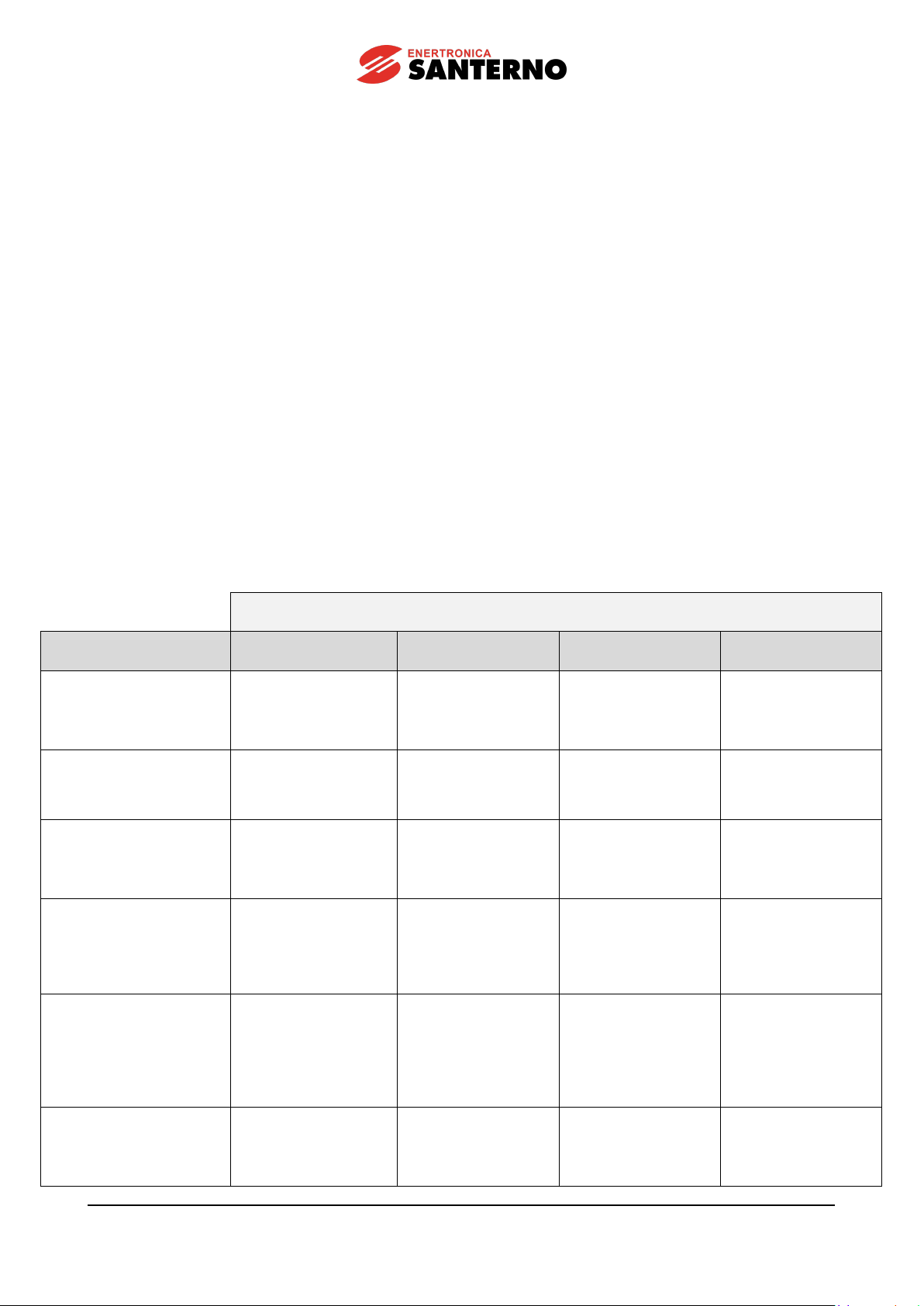
SANTERNO USER MANUALS MENTIONED IN THIS GUIDE
The following Santerno User Manuals are mentioned throughout this User Manual:
User Manual Part Number
User Manual
Sinus Penta
Penta Marine
Iris Blue
Solardrive Plus
Programming Guide
15R0102B200 SINUS
PENTA Programming
Guide
15R0102B200 SINUS
PENTA Programming
Guide
15R1102B200 IRIS
BLUE Programming
Guide
15P00SDB100
SOLARDRIVE PLUS
Installation and
Programming Guide
Installation Guide
15P0102B1 SINUS
PENTA Installation
Guide
15P0102B1 SINUS
PENTA Installation
Guide
15P1102B100 IRIS
BLUE Installation
Guide
15P00SDB100
SOLARDRIVE PLUS
Installation and
Programming Guide
Guide to the Regenerative
Application
15Q0102B00 SINUS
PENTA –Guide to the
Regenerative
Application
15Q0102B00 SINUS
PENTA –Guide to the
Regenerative
Application
N/A
N/A
Guide to the
Synchronous Motor
Application
15Q0102B200 SINUS
PENTA –Guide to the
Synchronous Motor
Application
15Q0102B200 SINUS
PENTA - Guide to the
Synchronous Motor
Application
N/A
N/A
PROFIdrive
COMMUNICATIONS
BOARD –Installation and
Programming Guide
15G0010B1
PROFIdrive
COMMUNICATIONS
BOARD –Installation
and Programming
Guide
15G0010B1
PROFIdrive
COMMUNICATIONS
BOARD - Installation
and Programming
Guide
15G0010B1
PROFIdrive
COMMUNICATIONS
BOARD - Installation
and Programming
Guide
15G0010B1
PROFIdrive
COMMUNICATIONS
BOARD - Installation
and Programming
Guide
BRIDGE MINI –User
Manual
15P4600B100
BRIDGE MINI –User
Manual
15P4600B100
BRIDGE MINI –User
Manual
15P4600B100
BRIDGE MINI –User
Manual
15P4600B100
BRIDGE MINI –User
Manual

USER MANUAL
MOTOR DRIVES
ACCESSORIES
3/312
User Manual Part Number
User Manual
Sinus Penta
Penta Marine
Iris Blue
Solardrive Plus
Sine Filters –User
Manual
15N0040B100 Sine
Filters –User Manual
15N0040B100 Sine
Filters –User Manual
15N0040B100 Sine
Filters –User Manual
15N0040B100 Sine
Filters –User Manual
Assembly Instructions for
Through-panel Kit S22
15W0102B100 SINUS
PENTA - Assembly
Instructions for
Through-panel Kit S22
15W0102B100 SINUS
PENTA - Assembly
Instructions for
Through-panel Kit S22
N/A
15W0102B100 SINUS
PENTA - Assembly
Instructions for
Through-panel Kit S22
Assembly Instructions for
Through-panel Kit S32
15W0102B200 SINUS
PENTA - Assembly
Instructions for
Through-panel Kit S32
15W0102B200 SINUS
PENTA - Assembly
Instructions for
Through-panel Kit S32
N/A
15W0102B200 SINUS
PENTA - Assembly
Instructions for
Through-panel Kit S32
Safe Torque Off Function
–Application Manual
15W0102B300 Safe
Torque Off Function –
Application Manual
15W0102B300 Safe
Torque Off Function –
Application Manual
15W0102B300 Safe
Torque Off Function –
Application Manual
15W0102B300 Safe
Torque Off Function –
Application Manual
AC/DC Units
15P0102B300 AC/DC
UNIT 465 –AC/DC
UNIT 1050
15P0102B300 AC/DC
UNIT 465 –AC/DC
UNIT 1050
N/A
N/A
RemoteDrive
16B0901B1 Remote
Drive REMOTE
CONTROL –User
Manual
16B0901B1 Remote
Drive DRIVE REMOTE
CONTROL –User
Manual
N/A
N/A
BU600 –Programming
Guide
15R0102B500 BU600 –
Programming Guide
15R0102B500 BU600
–Programming Guide
N/A
N/A

MOTOR DRIVES
ACCESSORIES
USER MANUAL
4/312
TABLE OF CONTENTS
REVISION INDEX......................................................................................................... 2
SANTERNO USER MANUALS MENTIONED IN THIS GUIDE.................................... 2
1. OVERVIEW.............................................................................................................16
2. POWER SUPPLY UNIT FOR DRIVES S41..S52 (SU465)......................................16
2.1. DELIVERY CHECK................................................................................................17
2.2. INSTALLING AND OPERATING THE SU465........................................................17
2.3. SU465 NAMEPLATE..............................................................................................17
2.4. SU465 OPERATING MODE...................................................................................18
2.4.1. SU465 OPERATION AS A 12-PULSE SUPPLY UNIT................................................ 18
2.5. SYSTEM REQUIREMENTS...................................................................................19
2.6. TECHNICAL SPECIFICATIONS ............................................................................19
2.7. INSTALLING THE SU465 ......................................................................................20
2.7.1. ENVIRONMENTAL REQUIREMENTS FOR THE SU465 INSTALLATION, STORAGE
AND TRANSPORT ...................................................................................................... 20
2.7.2. MOUNTING THE SU465 ............................................................................................. 21
2.7.3. IP21 KIT....................................................................................................................... 22
2.7.4. THROUGH-PANEL KIT ............................................................................................... 23
2.7.5. NEMA1 KIT.................................................................................................................. 24
2.7.6. POWER TERMINALS AND SIGNAL TERMINALS LAYOUT...................................... 25
2.7.7. SIGNAL CONNECTIONS ............................................................................................ 26
2.7.8. WIRING THE SU465 ................................................................................................... 29
2.8. CROSS-SECTIONS OF THE POWER CABLES AND SIZES OF THE PROTECTIVE
DEVICES WHEN THE SU465 IS INSTALLED.......................................................30
2.9. EARTH BONDING OF THE SU465........................................................................31
2.10. SCHEDULED MAINTENANCE OF THE SU465.....................................................31
2.11. INDUCTORS TO BE APPLIED TO THE DRIVE AND THE SU465 –12-PULSE
CONNECTION.......................................................................................................31
2.12. INDUCTORS TO BE APPLIED TO THE DRIVE AND THE SU465 –18-PULSE
CONNECTION.......................................................................................................32
3. RESISTIVE BRAKING.............................................................................................33
3.1 BRAKING RESISTORS TO BE SUPPLIED TO THE DRIVES EQUIPPED WITH
INTERNAL BRAKING UNIT...................................................................................34
3.1.1. APPLICATIONS WITH DUTY CYCLE 10% - CLASS 2T............................................ 35
3.1.2. APPLICATIONS WITH DUTY CYCLE 20% - CLASS 2T............................................ 36
3.1.3. APPLICATIONS WITH DUTY CYCLE 50% - CLASS 2T............................................ 37
3.1.4. APPLICATIONS WITH DUTY CYCLE 10% - CLASS 4T............................................ 38
3.1.5. APPLICATIONS WITH DUTY CYCLE 20% - CLASS 4T............................................ 39
3.1.6. APPLICATIONS WITH DUTY CYCLE 50% - CLASS 4T............................................ 40

USER MANUAL
MOTOR DRIVES
ACCESSORIES
5/312
3.1.7. APPLICATIONS WITH DUTY CYCLE 10% - CLASS 5T............................................ 41
3.1.8. APPLICATIONS WITH DUTY CYCLE 20% - CLASS 5T............................................ 42
3.1.9. APPLICATIONS WITH DUTY CYCLE 50% - CLASS 5T............................................ 43
3.1.10. APPLICATIONS WITH DUTY CYCLE 10% - CLASS 6T............................................ 44
3.1.11. APPLICATIONS WITH DUTY CYCLE 20% - CLASS 6T............................................ 45
3.1.12. APPLICATIONS WITH DUTY CYCLE 50% - CLASS 6T............................................ 46
3.2. BRAKING UNIT (BU200 2T-4T) FOR S41-S51 AND S60-S60P.............................47
3.2.1. DELIVERY CHECK...................................................................................................... 47
3.2.2. OPERATION................................................................................................................ 49
3.2.3. CONFIGURATION JUMPERS..................................................................................... 49
3.2.4. ADJUSTING TRIMMERS ............................................................................................ 50
3.2.5. INDICATOR LEDS....................................................................................................... 51
3.2.6. RATINGS..................................................................................................................... 51
3.2.7. INSTALLING THE BU200............................................................................................ 52
3.2.8. EARTH BONDING OF THE BU200............................................................................. 56
3.2.9. SCHEDULED MAINTENANCE OF THE BU200......................................................... 56
3.2.10. BRAKING RESISTORS FOR BU200 2T..................................................................... 57
3.2.11. BRAKING RESISTORS FOR BU200 4T..................................................................... 59
3.3. BRAKING UNITS FOR S41..S52 AND THEIR PARALLEL CONFIGURATION AND
DRIVES S60-S60P (BU600 4T-5T-6T)...................................................................61
3.3.1. DELIVERY CHECK...................................................................................................... 61
3.3.2. OPERATING MODE OF THE BU600 CONNECTED TO DRIVES S41..S52 AND THEIR
CONFIGURATION IN PARALLEL............................................................................... 62
3.3.3. OPERATING MODE OF THE BU600 WHEN CONNECTED TO S60 AND S60P
DRIVES OR A DC-BUS MADE UP OF SINUS PENTA /PENTA MARINE DRIVES
FROM DIFFERENT SIZES.......................................................................................... 63
3.3.4. BU600 USED AS A GENERAL-PURPOSE BRAKING UNIT TO BE CONNECTED TO A
DC-BUS ....................................................................................................................... 63
3.3.5. DIAGNOSTICS ............................................................................................................ 64
3.3.6. SPECIFICATIONS....................................................................................................... 65
3.3.7. INSTALLING THE BU600............................................................................................ 65
3.3.8. EARTH BONDING OF THE BU600............................................................................. 74
3.3.9. PROTECTING THE BRAKING RESISTORS.............................................................. 74
3.3.10. SCHEDULED MAINTENANCE OF THE BU600......................................................... 74
3.3.11. BRAKING RESISTORS TO BE APPLIED TO BU600 4T ........................................... 75
3.3.12. BRAKING RESISTORS TO BE APPLIED TO BU600 5T-6T...................................... 78
3.3.13. SERIAL COMMUNICATIONS...................................................................................... 83
3.3.14. AUXILIARY POWER SUPPLY .................................................................................... 86
3.4. BRAKING UNIT BU1440 FOR MODULAR INVERTERS (BU1440 4T AND BU1440
5T-6T)....................................................................................................................87
3.4.1. DELIVERY CHECK...................................................................................................... 87
3.4.2. OPERATION................................................................................................................ 88
3.4.3. RATINGS..................................................................................................................... 88
3.4.4. INSTALLING THE BU1440.......................................................................................... 89

MOTOR DRIVES
ACCESSORIES
USER MANUAL
6/312
3.4.5. EARTH BONDING OF THE BU1440........................................................................... 97
3.4.6. SCHEDULED MAINTENANCE OF THE BU1440....................................................... 97
3.4.7. BRAKING RESISTORS FOR BU1440 4T................................................................... 97
3.4.8. BRAKING RESISTORS FOR BU1440 5T-6T............................................................ 100
3.5. AVAILABLE BRAKING RESISTORS ...................................................................104
3.5.1. 350W MODELS (IP55)............................................................................................... 104
3.5.2. 550W MODELS (IP33)............................................................................................... 105
3.5.3. IP54 MODELS FROM 1100W TO 2200W................................................................. 106
3.5.4. IP20 MODELS FROM 4KW-8KW-12KW................................................................... 108
3.5.5. IP23 BOXES FROM 4KW TO 64KW......................................................................... 110
4. NEMA 1 GLANDKIT ..............................................................................................119
4.1.1. NAMEPLATE NEMA 1 GLANDKIT............................................................................ 119
4.2. IDENTICATION DATA .........................................................................................120
4.2.1. 2T-4T VOLTAGE CLASSES...................................................................................... 120
4.2.2. 5T-6T VOLTAGE CLASSES...................................................................................... 120
4.2.3. OVERALL DIMENSIONS WHEN INSTALLING AN INVERTER WITH THE NEMA 1
GLANDKIT................................................................................................................. 121
5. KEYPAD REMOTING KIT.....................................................................................122
5.1. REMOTING THE KEYPAD ON THE CABINET....................................................122
6. INDUCTORS.........................................................................................................123
6.1. INPUT INDUCTORS............................................................................................123
6.2. OUTPUT INDUCTORS (DU/DT FILTERS)...........................................................126
6.3. APPLYING THE INDUCTOR TO THE INVERTER...............................................127
6.3.1. CLASS 2T –AC AND DC INDUCTORS.................................................................... 127
6.3.2. CLASS 4T –AC AND DC INDUCTORS.................................................................... 128
6.3.3. CLASS 5T-6T –AC AND DC INDUCTORS .............................................................. 129
6.4. INDUCTANCE RATINGS.....................................................................................130
6.4.1. CLASS 2T-4T –AC 3-PHASE INDUCTORS............................................................. 130
6.4.2. CLASS 5T-6T –AC 3-PHASE INDUCTORS............................................................. 130
6.4.3. CLASS 2T-4T –DC INDUCTORS............................................................................. 132
6.4.4. CLASS 5T-6T –DC INDUCTORS............................................................................. 132
6.4.5. CLASS 2T, 4T, 5T, 6T –3-PHASE DU/DT INDUCTORS ......................................... 134
6.5. CLASS 2T –3-PHASE AC INDUCTORS IN IP54 CABINET................................135
6.6. CLASS 4T –3-PHASE AC INDUCTORS IN IP54 CABINET................................136
6.7. CLASS 5T-6T –3-PHASE AC INDUCTORS IN IP54 CABINET...........................138
6.8. OUTPUT SINGLE-PHASE INDUCTORS FOR MODULAR INVERTERS S75, S80,
S90 140
6.8.1. AC SINGLE-PHASE INDUCTORS –CLASS 4T-5T-6T............................................ 140
6.9. SINE FILTERS.....................................................................................................141
6.10. OUTPUT TOROIDAL FILTERS............................................................................142
7. ES836/2 ENCODER BOARD (SLOT A)................................................................143
7.1. IDENTIFICATION DATA ......................................................................................143

USER MANUAL
MOTOR DRIVES
ACCESSORIES
7/312
7.2. ENVIRONMENTAL REQUIREMENTS.................................................................144
7.3. ELECTRICAL SPECIFICATIONS.........................................................................144
7.4. INSTALLING ES836/2 ENCODER BOARD ON THE INVERTER (SLOT A).........145
7.5. TERMINALS IN ENCODER BOARD....................................................................146
7.6. CONFIGURATION DIP-SWITCHES ....................................................................146
7.7. JUMPER SELECTING THE TYPE OF ENCODER SUPPLY................................147
7.8. ADJUSTING TRIMMER .......................................................................................148
7.9. ENCODER WIRING AND CONFIGURATION......................................................148
7.10. WIRING THE ENCODER CABLE ........................................................................153
8. ES913 LINE DRIVER ENCODER BOARD (SLOT A)............................................154
8.1. IDENTIFICATION DATA ......................................................................................154
8.2. ENVIRONMENTAL REQUIREMENTS.................................................................154
8.3. ELECTRICAL SPECIFICATIONS.........................................................................155
8.4. INSTALLING THE LINE DRIVER BOARD ON THE INVERTER (SLOT A) ..........156
8.5. TERMINALS IN THE LINE DRIVER ENCODER BOARD.....................................157
8.6. CONFIGURATION DIP-SWITCHES ....................................................................157
8.7. ENCODER SUPPLY SELECTION JUMPER........................................................158
8.8. ADJUSTING TRIMMER .......................................................................................159
9. ES860 SIN/COS ENCODER BOARD (SLOT A) ...................................................160
9.1. IDENTIFICATION DATA ......................................................................................162
9.2. INSTALLING ES860 BOARD ON THE INVERTER (SLOT A)..............................162
9.2.1. SIN/COS ENCODER CONNECTOR......................................................................... 164
9.3. ES860 CONFIGURATION AND OPERATING MODES .......................................165
9.3.1. CONFIGURING AND ADJUSTING THE ENCODER SUPPLY VOLTAGE............... 166
9.4. CONNECTING THE ENCODER CABLE..............................................................167
9.5. ENVIRONMENTAL REQUIREMENTS.................................................................168
9.6. ELECTRICAL RATINGS ......................................................................................168
10. ES822 ISOLATED SERIAL BOARD (SLOT B).............................................170
10.1. IDENTIFICATION DATA ......................................................................................170
10.2. ENVIRONMENTAL REQUIREMENTS.................................................................170
10.3. ELECTRICAL FEATURES...................................................................................171
10.4. INSTALLING ES822 BOARD ON THE INVERTER (SLOT B)..............................172
10.5. JUMPER FOR RS232/RS485 SELECTION .........................................................173
10.6. DIP-SWITCH FOR RS485 TERMINATOR...........................................................173
11. OPTION BOARDS FOR FIELDBUS (SLOT B).............................................174
11.1. IDENTIFICATION DATA ......................................................................................175
11.2. INSTALLING THE FIELDBUS BOARD ON THE INVERTER (SLOT B) ...............176
11.3. STATUS LEDS ON THE B40 SERIES BOARDS.................................................178
11.3.1. NSTA/MSTA LEDS - PROFIBUS DP ........................................................................ 178
11.3.2. NSTA/MSTA LEDS - DEVICENET............................................................................ 178

MOTOR DRIVES
ACCESSORIES
USER MANUAL
8/312
11.3.3. NSTA/MSTA LEDS - PROFINET............................................................................... 179
11.3.4. NSTA/MSTA LEDS LEDS - MODBUS/TCP.............................................................. 179
11.3.5. NSTA/MSTA LEDS - ETHERNET IP......................................................................... 179
11.3.6. NSTA/MSTA LEDS - ETHERCAT ............................................................................. 179
11.3.7. PROFINET LINK LEDS ............................................................................................. 180
11.3.8. MODBUS/TCP LINK LEDS........................................................................................ 180
11.3.9. ETHERNET IP LINK LEDS........................................................................................ 180
11.3.10. ETHERCAT LINK LEDS ............................................................................... 180
11.4. STATUS LEDS ON THE ANYBUS-S BOARDS ...................................................182
11.4.1. LEDS FOR FIELDBUS INTERFACE CPU DIAGNOSTICS ...................................... 182
11.4.2. LEDS FOR PROFIBUS-DP®BOARD DIAGNOSTICS.............................................. 183
11.4.3. LEDS FOR DEVICENET®BOARD DIAGNOSTICS.................................................. 183
11.4.4. LEDS FOR CANOPEN®BOARD DIAGNOSTICS..................................................... 184
11.4.5. LEDS FOR ETHERNET BOARD DIAGNOSTICS..................................................... 184
11.5. B40 SERIES BOARD FOR PROFIBUS-DP®.......................................................185
11.5.1. PROFIBUS® FIELDBUS CONNECTOR................................................................... 186
11.5.2. BUS CONFIGURATION ............................................................................................ 186
11.5.3. CONNECTION TO THE FIELDBUS.......................................................................... 187
11.6. B40 SERIES BOARDS FEATURING ETHERNET INTERFACE (PROFINET IRT,
MODBUS/TCP, ETHERCAT, ETHERNET/IP)......................................................188
11.6.1. ETHERNET CONNECTOR ....................................................................................... 189
11.6.2. CONNECTION TO THE NETWORK......................................................................... 189
11.6.3. CONFIGURING B40 SERIES BOARDS WITH ETHERNET INTERFACE............... 190
11.7. B40 SERIES BOARD FOR DEVICENET®............................................................193
11.7.1. FIELDBUS DEVICENET TERMINAL BOARD........................................................... 193
11.7.2. CONNECTION TO THE FIELDBUS.......................................................................... 194
11.8. ANYBUS-S PROFIBUS-DP®BOARD ..................................................................195
11.8.1. PROFIBUS® FIELDBUS CONNECTOR................................................................... 196
11.8.2. CONFIGURATION OF THE PROFIBUS-DP COMMUNICATIONS BOARD ............ 196
11.8.3. CONNECTION TO THE FIELDBUS.......................................................................... 198
11.9. ANYBUS-S PROFIDRIVE®BOARD.....................................................................199
11.10. ANYBUS-S DEVICENET®BOARD.............................................................199
11.10.1. DEVICENET®FIELDBUS TERMINALS........................................................ 200
11.10.2. BOARD CONFIGURATION.......................................................................... 200
11.10.3. CONNECTION TO THE FIELDBUS............................................................. 201
11.11. ANYBUS-S CANOPEN®FIELDBUS BOARD..............................................202
11.11.1. CANOPEN®FIELDBUS CONNECTOR........................................................ 203
11.11.2. BOARD CONFIGURATION.......................................................................... 203
11.11.3. CONNECTION TO THE FIELDBUS............................................................. 204
11.12. ANYBUS-S ETHERNET BOARD FOR MODBUS/TCP...............................205
11.12.1. ETHERNET CONNECTOR........................................................................... 206
11.12.2. CONNECTION TO THE NETWORK ............................................................ 206

USER MANUAL
MOTOR DRIVES
ACCESSORIES
9/312
11.12.3. CONFIGURATION OF THE ETHERNET BOARD FOR MODBUS/TCP...... 208
11.13. ENVIRONMENTAL REQUIREMENTS COMMON TO ALL BOARDS .........215
12. ES919 COMMUNICATIONS BOARD (SLOT B)...........................................216
12.1. IDENTIFICATION DATA ......................................................................................216
12.2. ENVIRONMENTAL REQUIREMENTS COMMON TO ALL BOARDS ..................216
12.3. ELECTRICAL FEATURES COMMON TO ALL BOARDS.....................................217
12.4. INSTALLING THE ES919 BOARD ON THE DRIVE (SLOT B).............................217
12.4.1. ES919 BOARD FOR METASYS®N2........................................................................ 218
12.4.2. CONFIGURATION..................................................................................................... 219
12.4.3. RS485 CONNECTOR................................................................................................ 219
12.4.4. LEDS ON THE ASP485 PROTOCESSOR MODULE ............................................... 219
12.4.5. BAUD RATE DIP-SWITCHES................................................................................... 220
12.4.6. ADDRESS DIP-SWITCHES ...................................................................................... 220
12.5. ES919 BOARD FOR BACNET/ETHERNET.........................................................220
12.5.1. ETHERNET CONNECTOR ....................................................................................... 221
12.5.2. LEDS ON THE FFP485 PROTOCESSOR MODULE................................................ 221
12.5.3. TROUBLESHOOTING TIPS...................................................................................... 222
12.5.4. BOARD CONFIGURATION....................................................................................... 223
12.6. ES919 BOARD FOR BACNET/RS485.................................................................224
12.6.1. RS485 CONNECTOR................................................................................................ 224
12.6.2. BOARD CONFIGURATION....................................................................................... 225
13. BRIDGE MINI (SLOT B)................................................................................226
13.1. IDENTIFICATION DATA ......................................................................................227
13.2. INSTALLING THE BOARD ON THE INVERTER (SLOT B)..................................227
13.3. CONNECTIVITY ..................................................................................................227
14. ES847 I/O EXPANSION BOARD (SLOT C)..................................................228
14.1. IDENTIFICATION DATA ......................................................................................229
14.2. INSTALLING ES847 BOARD ON THE INVERTER (SLOT C)..............................229
14.3. ES847 BOARD TERMINALS ...............................................................................231
14.4. CONFIGURATION DIP-SWITCHES ....................................................................233
14.5. POSSIBLE SETTINGS FOR DIP-SWITCHES SW1 AND SW2............................234
14.6. WIRING DIAGRAMS............................................................................................236
14.6.1. CONNECTION OF “FAST” DIFFERENTIAL ANALOG INPUTS............................... 236
14.6.2. CONNECTION OF “FAST” CURRENT INPUTS....................................................... 237
14.6.3. CONNECTING “SLOW” ANALOG INPUTS TO VOLTAGE SOURCES ................... 237
14.6.4. CONNECTING “SLOW” ANALOG INPUTS TO CURRENT SOURCES................... 238
14.6.5. CONNECTING “SLOW” ANALOG INPUTS TO THERMISTOR PT100.................... 238
14.6.6. CONNECTING ISOLATED DIGITAL INPUTS........................................................... 239
14.6.7. CONNECTION TO AN ENCODER OR A FREQUENCY INPUT.............................. 240
14.6.8. CONNECTION TO ISOLATED DIGITAL OUTPUTS................................................. 241
14.7. ENVIRONMENTAL REQUIREMENTS.................................................................242

MOTOR DRIVES
ACCESSORIES
USER MANUAL
10/312
14.8. ELECTRICAL RATINGS ......................................................................................243
14.8.1. ANALOG INPUTS...................................................................................................... 243
14.8.2. DIGITAL INPUTS....................................................................................................... 245
14.8.3. DIGITAL OUTPUTS................................................................................................... 246
14.8.4. SUPPLY OUTPUTS................................................................................................... 246
15. ES870 RELAY I/O EXPANSION BOARD (SLOT C).....................................247
15.1. IDENTIFICATION DATA ......................................................................................247
15.2. INSTALLING ES870 BOARD ON THE INVERTER (SLOT C)..............................248
15.3. ES870 BOARD TERMINALS ...............................................................................249
15.4. CONNECTION TO AN ENCODER OR A FREQUENCY INPUT ..........................250
16. I/O EXPANSION BOARD 120/240VAC ES988 (SLOT C) ............................251
16.1. IDENTIFICATION DATA ......................................................................................252
16.2. INSTALLING THE ES988 OPTION BOARD ON THE DRIVES (SLOT C)............252
16.3. DIGITAL INPUT TERMINALS AND RELAY OUTPUT..........................................255
16.4. ES988 OPERATING MODE.................................................................................256
16.5. MAIN FEATURES................................................................................................258
16.6. ENVIRONMENTAL CONDITIONS.......................................................................258
16.7. ELECTRICAL SPECIFICATIONS.........................................................................259
17. ES861 RESOLVER AND INCREMENTAL ENCODER BOARD (SLOT C)...261
17.1. IDENTIFICATION DATA ......................................................................................262
17.2. INSTALLING ES861 BOARD ON THE INVERTER (SLOT C)..............................263
17.2.1. RESOLVER CONNECTOR ....................................................................................... 265
17.2.2. INCREMENTAL ENCODER AND DIGITAL LINES CONNECTORS........................ 266
17.3. ES861 CONFIGURATION AND OPERATING MODES .......................................267
17.4. CONFIGURING AND ADJUSTING THE ENCODER SUPPLY VOLTAGE...........267
17.5. CONNECTING THE RESOLVER CABLE............................................................269
17.6. ENVIRONMENTAL REQUIREMENTS.................................................................270
17.7. ELECTRICAL RATINGS ......................................................................................270
18. ES950 BISS/ENDAT ENCODER BOARD (SLOT C)....................................272
18.1. IDENTIFICATION DATA ......................................................................................274
18.2. INSTALLING ES950 BOARD ON THE INVERTER (SLOT C)..............................275
18.2.1. BISS/ENDAT ENCODER CONNECTOR.................................................................. 277
18.2.2. INCREMENTAL ENCODER AND DIGITAL LINE CONNECTORS........................... 278
18.3. ES950 CONFIGURATION AND OPERATING MODES .......................................279
18.3.1. BISS OPERATING MODE......................................................................................... 280
18.3.2. ENDAT OPERATING MODE..................................................................................... 280
18.3.3. CONFIGURING AND ADJUSTING THE ENCODER SUPPLY VOLTAGE............... 280
18.4. CONNECTING THE ENCODER CABLE..............................................................282
18.4.1. ENVIRONMENTAL REQUIREMENTS...................................................................... 284
18.4.2. ELECTRICAL RATINGS............................................................................................ 284

USER MANUAL
MOTOR DRIVES
ACCESSORIES
11/312
19. ES966 ENCODER BOARD HIPERFACE (SLOT C).....................................286
19.1. PART NUMBER...................................................................................................288
19.2. INSTALLING THE ES966 BOARD ON THE INVERTER (SLOT C)......................288
19.3. HIPERFACE® ENCODER CONNECTOR............................................................291
19.4. INCREMENTAL ENCODER CONNECTORS AND DIGITAL LINES ....................292
19.5. OPERATING MODE AND CONFIGURATION OF HIPERFACE ENCODER BOARD
293
19.6. HIPERFACE® OPERATING MODE.....................................................................294
19.7. CONFIGURING AND ADJUSTING THE ENCODER SUPPLY VOLTAGE...........295
19.8. TEMPERATURE SENSOR CONFIGURATION....................................................297
19.9. CONNECTING THE ENCODER CABLE..............................................................297
19.10. ENVIRONMENTAL REQUIREMENTS........................................................299
19.11. ELECTRICAL SPECIFICATIONS................................................................299
20. ES914 POWER SUPPLY UNIT BOARD.......................................................301
20.1. IDENTIFICATION DATA ......................................................................................303
20.2. WIRING ES914 BOARD.......................................................................................303
21. “LOC-0-REM” KEY SELECTOR SWITCH AND EMERGENCY PUSH-BUTTON
FOR IP54 MODELS ..............................................................................................308
21.1. WIRING IP54 INVERTERS WITH OPTIONAL “LOC-0-REM” KEY SELECTOR
SWITCH AND EMERGENCY PUSH-BUTTON....................................................310
22. INDEX...........................................................................................................311

MOTOR DRIVES
ACCESSORIES
USER MANUAL
12/312
Index of Figures
Figure 1: Nameplate for SU465....................................................................................................................... 17
Figure 2: The SU465 in 12-pulse configuration............................................................................................... 18
Figure 3: The SU465 as a supply unit of a conversion unit............................................................................. 18
Figure 4: Dimensions and fixing points for the SU465 .................................................................................... 21
Figure 5: Overall dimensions when using IP21 kit .......................................................................................... 22
Figure 6: Dimensions and fixing points when using the through-panel kit for the SU465............................... 23
Figure 7: NEMA1 kit and kit installation on the SU465.................................................................................... 24
Figure 8: Overall dimensions when installing the NEMA1 kit.......................................................................... 24
Figure 9: Power terminals................................................................................................................................ 25
Figure 10: Position of the jumpers in the ES840/1 board................................................................................ 28
Figure 11: Signal terminal board ..................................................................................................................... 28
Figure 12: Example of a 9-pin shielded cable for signal connection............................................................... 29
Figure 13: S41–S52 connections with 12- and 18-pulse SU465..................................................................... 29
Figure 14: Nameplate for BU200 2T-4T.......................................................................................................... 48
Figure 15: Positions of BU200 configuration jumpers ..................................................................................... 49
Figure 16: Positions of BU200 adjusting trimmers .......................................................................................... 50
Figure 17: Position of the Indicator LEDs........................................................................................................ 51
Figure 18: Dimensions and fixing points of BU200 ......................................................................................... 53
Figure 19: Terminals in BU200........................................................................................................................ 54
Figure 20: Connecting one BU200 to the inverter........................................................................................... 55
Figure 21: Master –Slave multiple connection................................................................................................ 56
Figure 22: Nameplate for BU600 4T-5T-6T..................................................................................................... 61
Figure 23: BRAKE connector supplied with the drive...................................................................................... 62
Figure 24: Cable connecting the drive to braking unit BU600......................................................................... 62
Figure 25: Diagnostic LEDs............................................................................................................................. 64
Figure 26: Dimensions and fixing points of braking unit BU600...................................................................... 66
Figure 27: Power terminals.............................................................................................................................. 68
Figure 28: Signal terminals in the BU600........................................................................................................ 70
Figure 29: Wiring diagram of a single drive with braking unit BU600.............................................................. 71
Figure 30: Signal connections of two BU600 operating as slaves .................................................................. 72
Figure 31: Power connections and location of two BU600 operating as slaves.............................................. 73
Figure 32: Example of direct and multidrop connection .................................................................................. 83
Figure 33: Recommended wiring diagram for “2-wire” MODBUS connection................................................. 85
Figure 34: Nameplate for BU1440 4T.............................................................................................................. 87
Figure 35: Dimensions and fixing points of BU1440 ....................................................................................... 90
Figure 36: External power connections for modular inverters S65-S70 provided with BU1440 ..................... 92
Figure 37: External power connections for modular inverters S75-S80 provided with BU1440 ..................... 93
Figure 38: ES841 Unit gate board for the braking unit.................................................................................... 94
Figure 39: Connection points on ES842 for the braking unit optical fibres ..................................................... 95
Figure 40: Internal wiring of inverters S65-S70 provided with a braking unit.................................................. 96
Figure 41: Overall dimensions, 350W resistor............................................................................................... 104
Figure 42: Overall dimensions for 550W braking resistor ............................................................................. 105
Figure 43: Overall dimensions for braking resistors from 1100W to 2200W................................................. 106
Figure 44: Overall dimensions for braking resistors 4kW, 8kW, 12kW ......................................................... 108
Figure 45: Overall dimensions of IP23 Box resistors .................................................................................... 110
Figure 46: Position of electrical connections in box resistors........................................................................ 110
Figure 47: Typical nameplate for SINUS PENTA NEMA KIT accessory ...................................................... 119
Figure 48: Example of a NEMA 1 Kit installed on a SINUS PENTA ............................................................. 120
Figure 49: Wiring diagram for optional inductors........................................................................................... 123
Figure 50: Amplitude of harmonic currents (approximate values)................................................................. 125
Figure 51: Output inductor wiring .................................................................................................................. 126
Figure 52: Mechanical features of a 3-phase inductor.................................................................................. 131
Figure 53: Mechanical features of a DC inductor.......................................................................................... 133
Figure 54: Mechanical features of the 3-phase du/dt inductors .................................................................... 134
Figure 55: Mechanical features of three-phase inductors for Class 2T-4T in IP54 cabinet .......................... 137

USER MANUAL
MOTOR DRIVES
ACCESSORIES
13/312
Figure 56: Mechanical features of a 3-phase inductor for Class 5T-6T in IP54 cabinet ............................... 139
Figure 57: Mechanical features of a single-phase output inductor................................................................ 140
Figure 58: Sine filter....................................................................................................................................... 141
Figure 59: Output toroidal filter...................................................................................................................... 142
Figure 59: Encoder board (ES836/2)............................................................................................................. 143
Figure 60: Position of slot A for the installation of the encoder board........................................................... 145
Figure 61: Encoder board fastened to its slot................................................................................................ 145
Figure 62: Positions of DIP-switches and their factory-setting...................................................................... 146
Figure 63: LINE DRIVER or PUSH-PULL encoder with complementary outputs......................................... 149
Figure 64: PUSH-PULL encoder with single-ended outputs......................................................................... 150
Figure 65: PNP or NPN encoder with single-ended outputs and external load resistors.............................. 151
Figure 66: PNP or NPN encoder with single-ended outputs and internal load resistors............................... 152
Figure 67: Wiring the encoder cable.............................................................................................................. 153
Figure 68: ES913 Encoder board.................................................................................................................. 154
Figure 69: Position of slot A for the installation of the encoder board........................................................... 156
Figure 70: Encoder board fastened to its slot................................................................................................ 156
Figure 71: Location of the configuration DIP-switches.................................................................................. 157
Figure 72: Location of the jumpers selecting the encoder supply voltage .................................................... 159
Figure 73: ES860 Sin/Cos Encoder board .................................................................................................... 161
Figure 74: Location of Slot A inside the drive terminal board covers............................................................ 162
Figure 75: Fitting the ES860 board inside the drive ...................................................................................... 163
Figure 76: Pin layout on the high density connector ..................................................................................... 164
Figure 77: DIP-switch SW1 setting in three-channel mode........................................................................... 165
Figure 78: DIP-switch SW1 setting for five-channel mode............................................................................ 165
Figure 79: Position of the jumper and voltage adjusting trimmer.................................................................. 166
Figure 80: Recommended dual shielded connection for encoder cable ....................................................... 167
Figure 81: ES822 board................................................................................................................................. 170
Figure 82: Position of the slot for the installation of the serial isolated board ............................................... 172
Figure 83: Jumper setting RS232/RS485...................................................................................................... 173
Figure 84: Configuration of terminator DIP-switch for line RS485................................................................. 173
Figure 85: Location of the slot B inside the terminal board cover of Santerno drives................................... 176
Figure 86: Checking contacts in the slot B .................................................................................................... 177
Figure 87: Fastening the communications board to slot B............................................................................ 177
Figure 88: Position of the status LEDs on the B40 series board................................................................... 181
Figure 89: Position of indicator LEDs on the board....................................................................................... 182
Figure 90: PROFIBUS-DP®fieldbus communications board ........................................................................ 185
Figure 91: Example of a Profibus network (the correct setting of the line terminators is highlighted) .......... 186
Figure 92: Profibus® FC (FastConnect) connector with line termination settings ........................................ 187
Figure 93: B40 series Fieldbus comms board with Ethernet interface.......................................................... 189
Figure 94: DeviceNET Fieldbus Comms Board............................................................................................. 193
Figure 95: PROFIBUS-DP®fieldbus communications board ........................................................................ 195
Figure 96: Example of a Profibus network (the correct setting of the line terminators is highlighted) .......... 197
Figure 97: Example of the rotary-switch position to set Profibus address “19” ............................................. 197
Figure 98: DeviceNet®Fieldbus communications board............................................................................... 199
Figure 99: Outline of the topology of a DeviceNet trunk line......................................................................... 201
Figure 100: CANopen®fieldbus communications board ............................................................................... 202
Figure 101: Example of the position of the rotary-switches for 125kbits/s and Device Address 29.............. 203
Figure 102: Ethernet Fieldbus Communications Board................................................................................. 205
Figure 103: Cable of Cat. 5 for Ethernet and standard colour arrangement in the connector ...................... 206
Figure 104: Windows 7 - Accessing directly to the network configuration folder .......................................... 209
Figure 105: Setting a computer for a point-to-point connection to the inverter............................................. 210
Figure 106: Setting the DIP-switches to set the IP address 192.168.0.2...................................................... 211
Figure 107: Internal webserver...................................................................................................................... 212
Figure 108: Example of the ping command to the IP address of the inverter interface board...................... 213
Figure 109: Anybus IP config utility ............................................................................................................... 213
Figure 110: Setting ModScan for a Modbus/TCP connection....................................................................... 214
Figure 111: Display of the output variables of the inverter through the Modbus/TCP protocol..................... 214
Figure 112: Position of the slot for ES919 board........................................................................................... 218
Figure 113: ES919 Board for Metasys®N2................................................................................................... 218
Figure 114: RS485 connector for Metasys®N2............................................................................................. 219
Figure 115: ES919 Board for BACnet/Ethernet............................................................................................. 220

MOTOR DRIVES
ACCESSORIES
USER MANUAL
14/312
Figure 116: BACnet LEDs ............................................................................................................................. 221
Figure 117: BACnet IP Configuration ............................................................................................................ 223
Figure 118: ES919 Board for BACnet/RS485 ............................................................................................... 224
Figure 119: RS485 connector for BACnet/RS485......................................................................................... 224
Figure 120: BACnet MSTP Configuration...................................................................................................... 225
Figure 121: Bridge Mini Embedded............................................................................................................... 227
Figure122: Bridge Mini Stand alone .............................................................................................................. 227
Figure 123: Signal conditioning and additional I/Os board (ES847) ............................................................. 229
Figure 124: Removing the inverter cover; location of slot C.......................................................................... 230
Figure 125: Fitting the strips inside ES847 board and fixing the board on slot C ......................................... 230
Figure 126: Connection of a bipolar voltage source to a differential input .................................................... 236
Figure 127: Connection of 0÷20mA (4÷20mA) sensors to “fast” current inputs ............................................ 237
Figure 128: Connecting a voltage source to a “slow” analog input ............................................................... 237
Figure 129: Connecting thermoresistors PT100 to analog channels XAIN8–11 / T1–4 ............................... 238
Figure 130: PNP input wiring......................................................................................................................... 239
Figure 131: Connecting the incremental encoder to fast inputs XMDI7 and XMDI8..................................... 240
Figure 132: Signal sent from a 24V, Push-pull frequency output.................................................................. 240
Figure 133: XMDOx output connection as PNP for relay command with internal power supply .................. 241
Figure 134: XMDOx output connection as PNP for relay command with external power supply ................. 241
Figure 135: XMDOx output connection as NPN for relay command with internal power supply .................. 242
Figure 136: XMDOx output connection as NPN for relay command with external power supply ................. 242
Figure 137: Relay I/O expansion board ES870............................................................................................. 247
Figure 138: Removing the inverter cover; location of slot C.......................................................................... 248
Figure 139: ES988 option board, DIGITAL I/O 120/240 Vrms...................................................................... 251
Figure 140: Location of slot C inside the terminal board cover ..................................................................... 252
Figure 141: Terminal strips inserted into SLOT C......................................................................................... 253
Figure 142: Fastening ES988 option board inside the inverter ..................................................................... 254
Figure 143: Input-output signal terminal blocks............................................................................................. 255
Figure 144: Block diagram for ES988 interfacing.......................................................................................... 256
Figure 145: Utilization example of digital inputs on ES988 option board...................................................... 257
Figure 146: ES861 Incremental Encoder and Resolver expansion board .................................................... 262
Figure 147: Location of slot C inside the terminal board cover of the drives ................................................ 263
Figure 148: Terminal strips inserted into SLOT C......................................................................................... 264
Figure 149: Fitting the ES861 board inside the drive .................................................................................... 264
Figure 150: Pin layout on the D-sub 9-pin female connector........................................................................ 265
Figure 151: Input-output signal terminal boards............................................................................................ 266
Figure 152: Jumpers and trimmer for power supply configuration................................................................ 267
Figure 153: Recommended dual shielded connection for resolver cable ..................................................... 269
Figure 154: ES950 encoder BiSS/EnDat board ............................................................................................ 273
Figure 155: Location of slot C inside the terminal board cover in the drives................................................. 275
Figure 156: Terminal strips inserted into SLOT C......................................................................................... 276
Figure 157: Fitting the ES950 board inside the inverter................................................................................ 276
Figure 158: Pin layout on CN7 D-sub 15-pin female connector.................................................................... 277
Figure 159: Input-output signal terminal board.............................................................................................. 278
Figure 160: Block diagram for ES950 board interface .................................................................................. 279
Figure 161: Jumpers and trimmer for power supply configuration................................................................ 281
Figure 162: Recommended dual shielded connection for encoder cable ..................................................... 283
Figure 163: ES966 Hiperface Encoder Board............................................................................................... 287
Figure 164: Location of slot C inside the terminal board cover of the drive .................................................. 289
Figure 165: Inserting terminal strips to slot C................................................................................................ 289
Figure 166: Fixing the ES966 board inside the drive .................................................................................... 290
Figure 167: Pin layout on HD female D-sub 26 connector............................................................................ 291
Figure 168: Input-output signal terminals...................................................................................................... 292
Figure 169: Block diagram of ES966 interface board.................................................................................... 293
Figure 170: Location of the jumpers, trimmers and DIP-switches of ES966................................................. 296
Figure 171: Connection method recommended for the double-shield encoder cable on ES966.................. 298
Figure 172: ES914 Power supply unit board................................................................................................. 301
Figure 173: Dimensions of ES914 board....................................................................................................... 301
Figure 174: Basic wiring diagram for ES914 board....................................................................................... 302
Figure 175: Block-diagram with 3-zone insulation......................................................................................... 303
Figure 176: Position of the LEDs and DIP-switches in ES914 board............................................................ 307

USER MANUAL
MOTOR DRIVES
ACCESSORIES
15/312
Figure 177: Wiring diagram for IP54 inverters............................................................................................... 310
Index of Tables
Table 1: Product –Power Supply Unit SU465 compatibility............................................................................ 16
Table 2: Product –Resistive braking compatibility.......................................................................................... 33
Table 3: Alarm ID and Type of fault on BU600 with the TYPE OF FAULT LED............................................. 64
Table 4: BU600 Power terminals..................................................................................................................... 67
Table 5: Product –NEMA 1 GLANDKIT compatibility................................................................................... 119
Table 6: Product –Keypad remoting kit compatibility ................................................................................... 122
Table 7: Product –Inductors compatibility..................................................................................................... 123
Table 8: Product –ES836/2 Encoder board compatibility............................................................................. 143
Table 9: Product –ES913 Encoder board compatibility................................................................................ 154
Table 10: Product –ES860 Encoder board compatibility.............................................................................. 160
Table 11: Product –ES822 Optoisolated serial board compatibility ............................................................. 170
Table 12: Product –Fieldbus board compatibility ......................................................................................... 174
Table 13: Product –ES919 Communications board compatibility ................................................................ 216
Table 14: Product –Bridge Mini compatibility ............................................................................................... 226
Table 15: Product - ES847 I/O Expansion board compatibility ..................................................................... 228
Table 16: Product –ES870 I/O Expansion board compatibility .................................................................... 247
Table 17: Product –ES988 I/O Expansion board compatibility .................................................................... 251
Table 18: Product –ES861 Resolver and incremental encoder board compatibility.................................... 261
Table 19: Product –ES950 BISS/EnDat Encoder board compatibility ......................................................... 272
Table 20: Product –ES966 Hiperface Encoder board compatibility............................................................. 286
Table 21: Configuration of incremental encoder power supply..................................................................... 295
Table 22: Configuration of Hiperface encoder power supply ........................................................................ 295
Table 23: DIP-switch configuration for the temperature sensor on ES966 ................................................... 297
Table 24: Configuration of jumper J7 ............................................................................................................ 298
Table 25: Product –ES914 Power Supply Unit board compatibility ............................................................. 301
Table 26: Product –Key selector switch and Emergency push-button for IP54 models compatibility ......... 308
MOTOR DRIVES
ACCESSORIES
USER MANUAL
16/312
1. OVERVIEW
This manual covers the specifications and installation instructions for the option boards and external
accessories available for the following products manufactured by Santerno:
-Sinus Penta
-Penta Marine
-Iris Blue
-Solardrive Plus
The accessory-product compatibility is stated in the Compatibility Table at the beginning of each section in
this manual.
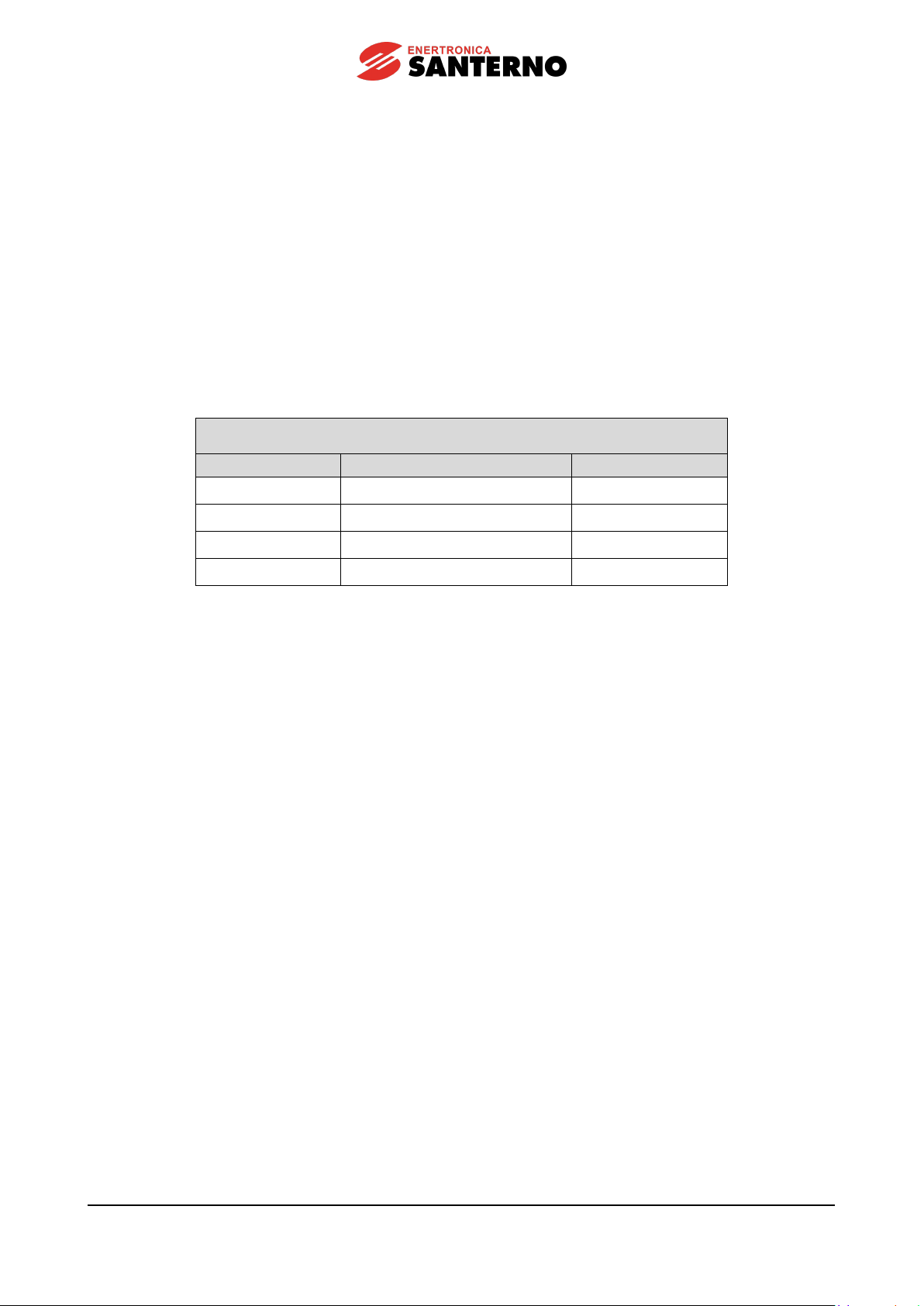
2. POWER SUPPLY UNIT FOR DRIVES S41..S52 (SU465)
Product-Accessory Compatibility
Product
Power Supply Unit SU465
Comments
Sinus Penta
√
Penta Marine
√
Iris Blue
-
Solardrive Plus
-
Table 1: Product –Power Supply Unit SU465 compatibility
The power supply for the S41..S52 drives (see the 12-pulse Connection for Modular Inverters in the
Installation Guide) requires the SU465.
The SU465 must be installed next to the inverter and is to be connected as described below.
Instructions on how to transport, handle and unpack the product, please refer to the general instructions
given in the Transport and Handling and Unpacking in the Installation Guide.
The SU465 may be utilized as a 12-pulse rectifier for the following drive sizes:
1. S41
2. S42
3. S51
4. S52
Alternatively, it may be used as a standard rectifier.
The voltage input must range from 200Vac to 690Vac; the maximum allowable current for the SU465 is
465A.
An 18-pulse connection may be obtained by using N.2 supply units SU465.
The supply unit may also be used as a stand-alone supply unit. Please refer to the specific manual AC/DC
Units.
The SU465 is an Open Type device featuring IP00 degree of protection suitable for installation inside a
cabinet featuring at least IP3X degree of protection.
USER MANUAL
MOTOR DRIVES
ACCESSORIES
17/312
2.1. Delivery Check
Make sure that the equipment is not damaged and that it complies with the equipment you ordered by
referring to the nameplate located on the inverter front part. The inverter nameplate is described below. If the
equipment is damaged, contact the supplier or the insurance company concerned. If the equipment does not
comply with the one you ordered, please contact the supplier as soon as possible.
If the equipment is stored before being started, make sure that the ambient conditions do not exceed the
acceptable ratings (temperature: –25°C to +70°C; relative humidity <95%, no condensation). The equipment
guarantee covers any manufacturing defect. The manufacturer has no responsibility for possible damages
occurred when shipping or unpacking the inverter. The manufacturer is not responsible for possible damages
or faults caused by improper and irrational uses; wrong installation; improper conditions of temperature,
humidity, or the use of corrosive substances. The manufacturer is not responsible for possible faults due to
the inverter operation at values exceeding the inverter ratings and is not responsible for consequential and
accidental damages. The equipment is covered by 2-year guarantee starting from the date of delivery.
2.2. Installing and Operating the SU465
Please refer to the general instructions given in section Installing and Operating the Equipment in the
Installation Guide.
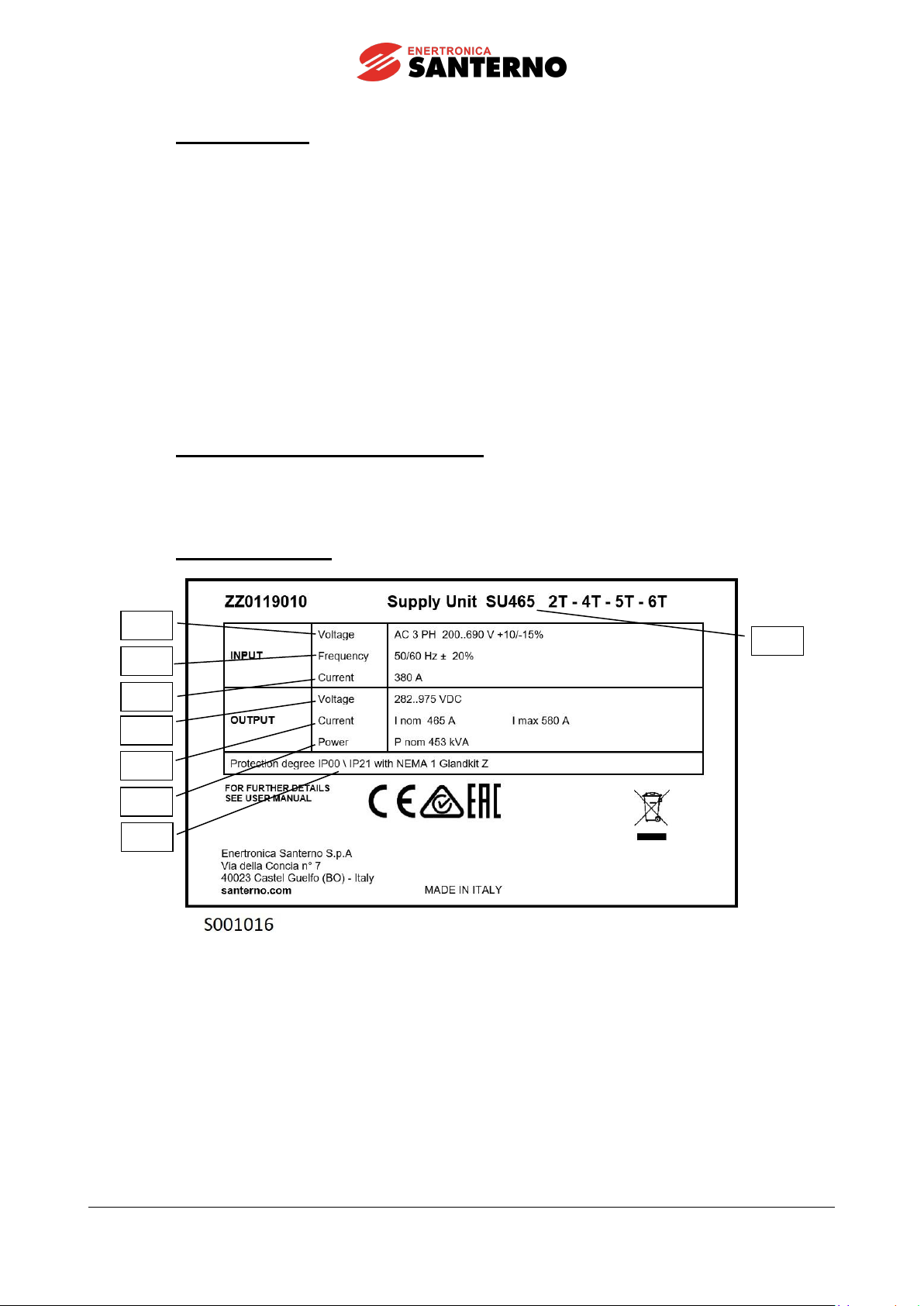
2.3. SU465 Nameplate
Figure 1: Nameplate for SU465
1. Model: SU465
2. Input voltage: 200-690 Vac
3. Input frequency: 50-60 Hz
4. Input current: 380 A nominal current
5. Output voltage: 282-975 Vdc
6. Output current: 465 A nominal 580 A maximum
7. Nominal power: 453 kVA
8. Degree of protection: IP00 \ IP21
2
3
4
5
6
7
8
1

MOTOR DRIVES
ACCESSORIES
USER MANUAL
18/312
2.4. SU465 Operating Mode
The SU465 may operate as follows:
•In parallel to a 12-pulse converter (this solution reduces the harmonic contents to the power supply
mains):
Figure 2: The SU465 in 12-pulse configuration
•As a supply unit for a conversion unit:
Figure 3: The SU465 as a supply unit of a conversion unit
2.4.1. SU465 Operation as a 12-pulse Supply Unit
The 12-pulse supply unit is controlled directly by the drive. When operating as an additional rectifier bridge
for the 12-pulse connection, the following diagnostics functions are performed by the driver board of the
drive:
•Phase detection and measurement
•Heatsink overtemperature measurement and alarm
•Precharge control
USER MANUAL
MOTOR DRIVES
ACCESSORIES
19/312
2.5. System Requirements
As the input current is automatically controlled, the system must meet the following requirements:
•Provide the drive and the supply unit with line inductors as detailed in section Inductors to be Applied
to the Drive and the SU465.
•The three-phase transformer must be:
oSymmetrical
oWith Dy11d0 or Dy5d0 vector unit
oThe secondary output voltages must range:
▪Within 5% of relative variation at full load
▪Within 0.5% under no-load conditions
oThe short-circuit current must be Vsc>4%
•Wiring to the transformer, the supply unit and the drive shall be as close as possible in terms of cable
length and cable cross-section.
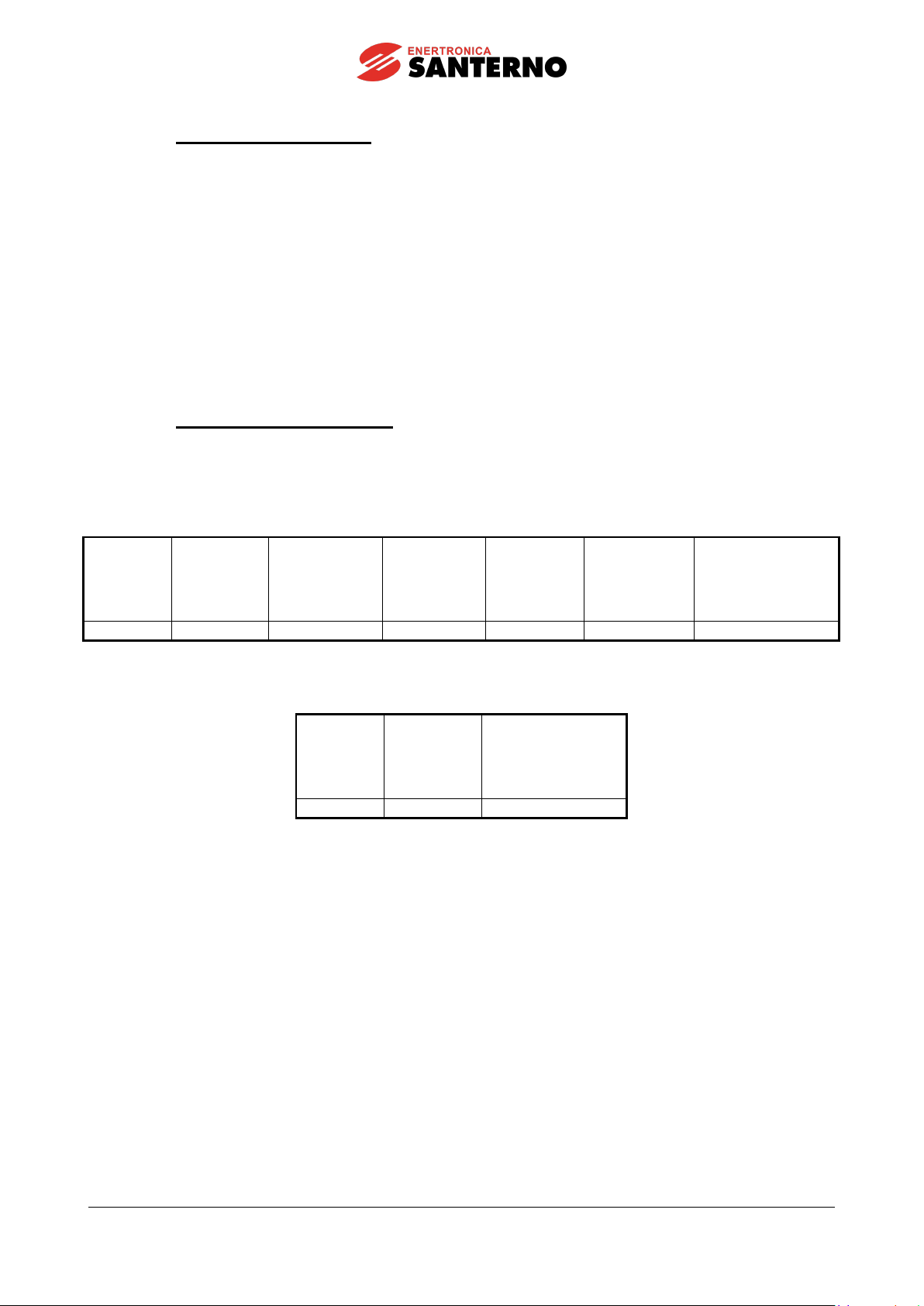
2.6. Technical Specifications
Electrical specifications:
Overvoltage category III (according to EN 61800-5-1)
MODEL
Rated input
current (A)
Supply
voltage
Rated
output
current (A)
Maximum
output
current (A)
Output
voltage
Dissipated power
(at rated current)
(W)
SU465
380
200-690Vac
465
580
0-975Vdc
1160
Mechanical specifications:
MODEL
Degree of
protection
Sound pressure
(dB)
SU465
IP00(*)
57
(*) NEMA1 when using the special optional kit

MOTOR DRIVES
ACCESSORIES
USER MANUAL
20/312
2.7. Installing the SU465
2.7.1. Environmental Requirements for the SU465 Installation, Storage and
Transport
Maximum surrounding air
temperature
–10 to +40°C with no derating
from +40°C to +55°C with 2% derating of the rated current for each
degree beyond +40°C
Ambient temperatures for storage
and transport
–25°C to +70°C.
Installation environment
Pollution degree 2 or better (according to EN 61800-5-1).
Do not install in direct sunlight and in places exposed to conductive dust,
corrosive gases, vibrations, water sprinkling or dripping (depending on IP
ratings); do not install in salty environments.
Altitude
Max. altitude for installation 2000 m a.s.l. For installation above 2000 m
and up to 4000 m, please contact Enertronica Santerno S.p.A..
Above 1000 m, derate the rated current by 1% every 100 m.
Operating ambient humidity
From 5% to 95%, from 1g/m3to 29g/m3, non-condensing and non-
freezing (class 3K3 according to EN 61800-5-1).
Storage ambient humidity
From 5% to 95%, from 1g/m3 to 29g/m3, non-condensing and non-
freezing (class 1K3 according to EN 61800-5-1).
Ambient humidity during transport
Max. 95%, up to 60g/m3; condensation may appear when the equipment
is not running (class 2K3 according to EN 61800-5-1).
Storage and operating
atmospheric pressure
From 86 to 106 kPa (classes 3K3 and 1K4 according to EN 61800-5-1).
Atmospheric pressure during
transport
From 70 to 106 kPa (class 2K3 according to EN 61800-5-1).
CAUTION
Ambient conditions strongly affect the inverter life. Do not install the equipment
in places that do not have the above-mentioned ambient conditions.
This manual suits for next models
3
Table of contents
Popular Media Converter manuals by other brands







Ace Plus
Ace Plus EX-G037 user manual

Delta Electronics
Delta Electronics PMF Series instruction manual

GoMax Electronics
GoMax Electronics CV-910S user manual

ON Semiconductor
ON Semiconductor LM339 Reference manual

Ross
Ross ADC-8432 user manual

Omnitron Systems Technology
Omnitron Systems Technology Omnitron iConverter GX/TM2 user manual





