GT-1110-MTR
GPS Receiver Module
Revision: V2.0.1-January 2015
1 Description...................................................................................................................................................................... 3
1.1 General Description...............................................................................................................................................3
1.2. Key Features.........................................................................................................................................................4
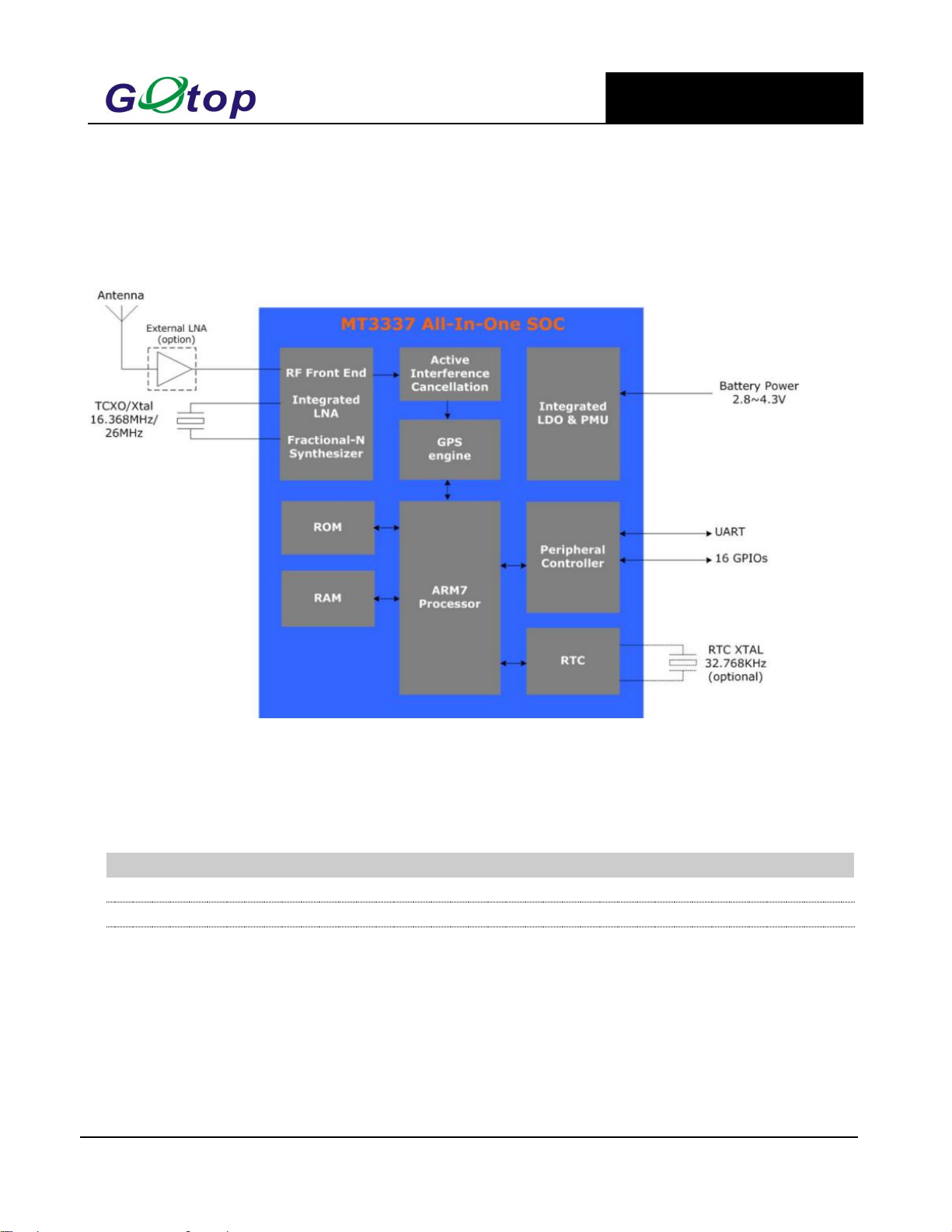
1.3. Block Diagram..................................................................................................................................................... 5
1.4. Protocols Supported by the Module.....................................................................................................................5
2 Application...................................................................................................................................................................... 6
2.1. Pin Assignment.....................................................................................................................................................6
2.2. Pin Definition....................................................................................................................................................... 6
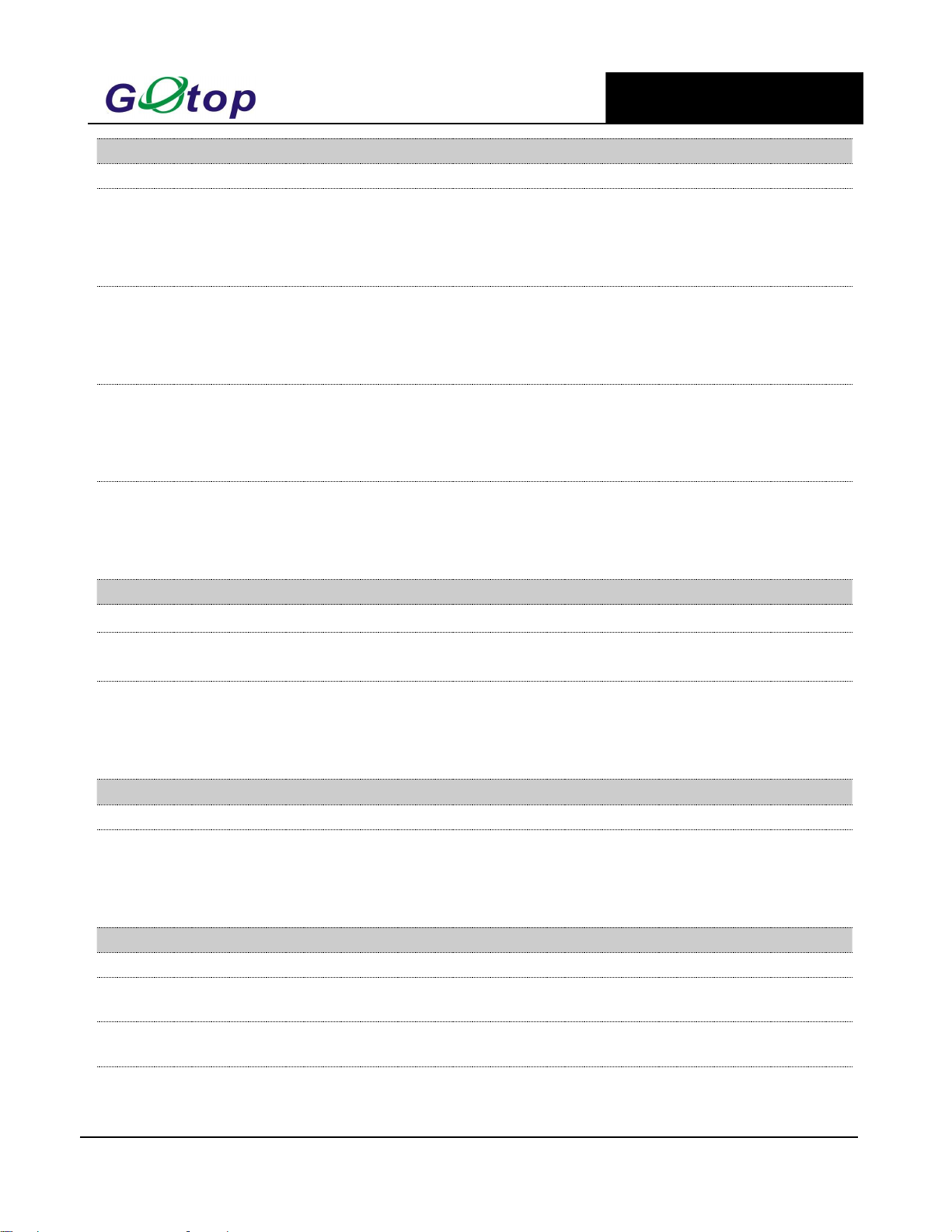
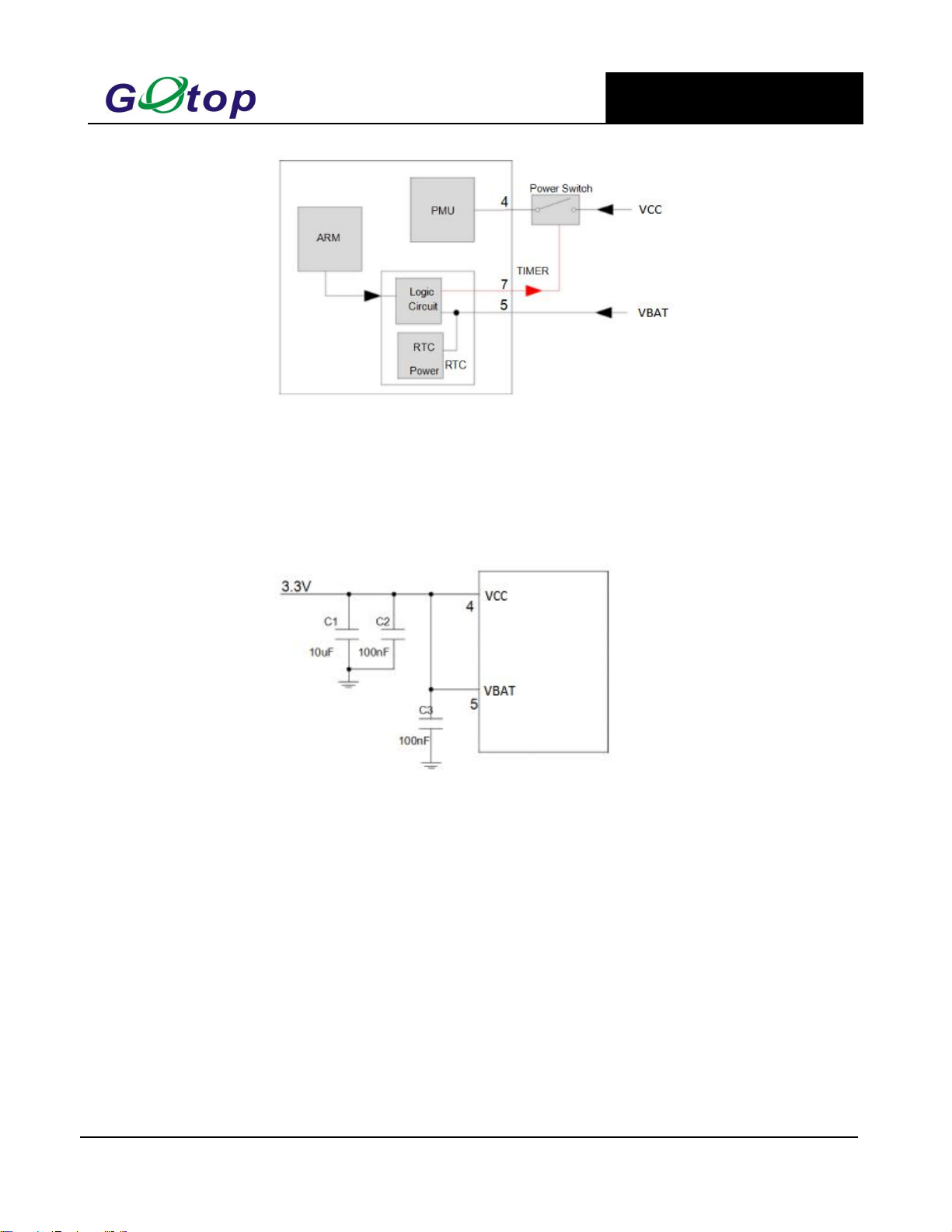
2.3. Power Supply....................................................................................................................................................... 8
2.4. Operating Modes................................................................................................................................................ 10
2.4.1. Full on Mode........................................................................................................................................... 11
2.4.2. Standby Mode..........................................................................................................................................11
2.4.3. Backup Mode.......................................................................................................................................... 11
2.4.4. Periodic Mode......................................................................................................................................... 13
2.4.5. AlwaysLocateTM Mode......................................................................................................................... 15
2.4.6. FLP Mode................................................................................................................................................16
2.5. UART Interface.................................................................................................................................................. 16
2.6. EASY Technology..............................................................................................................................................18
2.7. Multi-tone AIC................................................................................................................................................... 18
2.8. LOCUS...............................................................................................................................................................19
2.9. PPS VS. NMEA................................................................................................................................................. 19
3 Antenna Interfaces....................................................................................................................................................... 20
3.1. PCB Design Guide............................................................................................................................................. 20
3.2. External Active Antenna.................................................................................................................................... 20
4 Electrical, Reliability and Radio Characteristics......................................................................................................22
4.1. Absolute Maximum Ratings...............................................................................................................................22
4.2. Operating Conditions......................................................................................................................................... 22
4.3. Current Consumption......................................................................................................................................... 23
4.4. Electrostatic Discharge.......................................................................................................................................23
4.5. Reliability Test................................................................................................................................................... 24
5 Mechanical Dimensions............................................................................................................................................... 24
6 Manufacturing, Packaging and Ordering Information........................................................................................... 25
6.1. Assembly and Soldering.....................................................................................................................................25
6.2. Moisture Sensitivity........................................................................................................................................... 25
6.3. ESD Protection...................................................................................................................................................25
6.4. Tape and Reel Packaging................................................................................................................................... 26
7 Appendix References....................................................................................................................................................27
8 NMEA 0183 Protocol....................................................................................................................................................28