3
kung) darf keinesfalls weiter verwendet wer-
den, da es ansonsten jederzeit zum Ausfall des
Reglers kommen kann.
•
Der Regler darf nur an Akkus betrieben
werden. Ein Betrieb an Netzgeräten ist nicht
zulässig.
•
Der Regler darf in keinem Fall an das 230V
Wechselstromnetz angeschlossen werden.
•
Bei Akkus mit hoher Kapazität muss unbe-
dingt auf ausreichende Kühlung des Reglers
geachtet werden.
•
Eine Verlängerung der Akku- oder Motorkabel
kann die EMV-Eigenschaften beeinflussen.
Eine Verlängerung der Kabel erfolgt auf
eigenes Risiko.
•
Bei Strommessungen ist ein Zangenamper-
meter zu verwenden. Ein eingeschleiftes
Messgerät oder -shunt kann den Regler
beschädigen.
•
Bei Verwendung des BEC (Schaltung zur
Versorgung des Empfängers aus dem
Antriebsakku) muss aus Sicherheitsgründen
immer zusätzlich ein geladener, ausreichend
großer Empfängerakku verbaut werden (siehe
BEC 4.3). Fehlfunktionen, z.B. durch
Kabelbruch, Kurzschluss, Wackelkontakt oder
Ausfall eines BEC-Bauteils, führen sonst zum
Ausfall der gesamten Empfangsanlage.
•
Vor dem Erstflug muss mittels Tests am Bo-
den sichergestellt werden, dass die BEC-
Belastbarkeit für die Anwendung ausreicht.
3. Grundlagen
Die KOSMIK Regler verfügen über eine Modus-
programmierung. Der jeweils gewählte Modus
stellt die für den Betriebszustand benötigten
Parameter selbst ein. Eine Programmierung der
einzelnen Parameter entfällt im Normalbetrieb.
Sollten andere Parameter für einzelne Betriebszu-
stände gewünscht werden, können diese mittels
ProgUNIT verändert werden.
3.1 Gaskurve im Sender zur Vorbereitung der
Reglerprogrammierung
Im Sender wird auf den für das Gas festgelegten
Kanal eine linear ansteigende Gasgerade von
0% bis 100% eingestellt.
Der Gaskanal kann auf einen Knüppel, Schalter
oder Schieberegler gelegt werden.
3.2 Programmierung des gewünschten
Modus im Regler
Beim Programmieren des gewünschten Modus
lernt der Regler den am Sender zur Verfügung
stehenden Gasweg ein (0–100%). Alle weiteren,
für den gewählten Modus notwendigen
Parameter stellt der KOSMIK automatisch ein.
Für die Programmierung der Modi sind unter-
schiedliche Schritte notwendig. Die Vorgehens-
weise entnehmen Sie bitte dem jeweiligen Text in
dieser Anleitung.
Bitte beachten Sie, Modus 1 bis 6 können
nur über die Modusprogrammierung, nicht
über die ProgUNIT, programmiert werden.
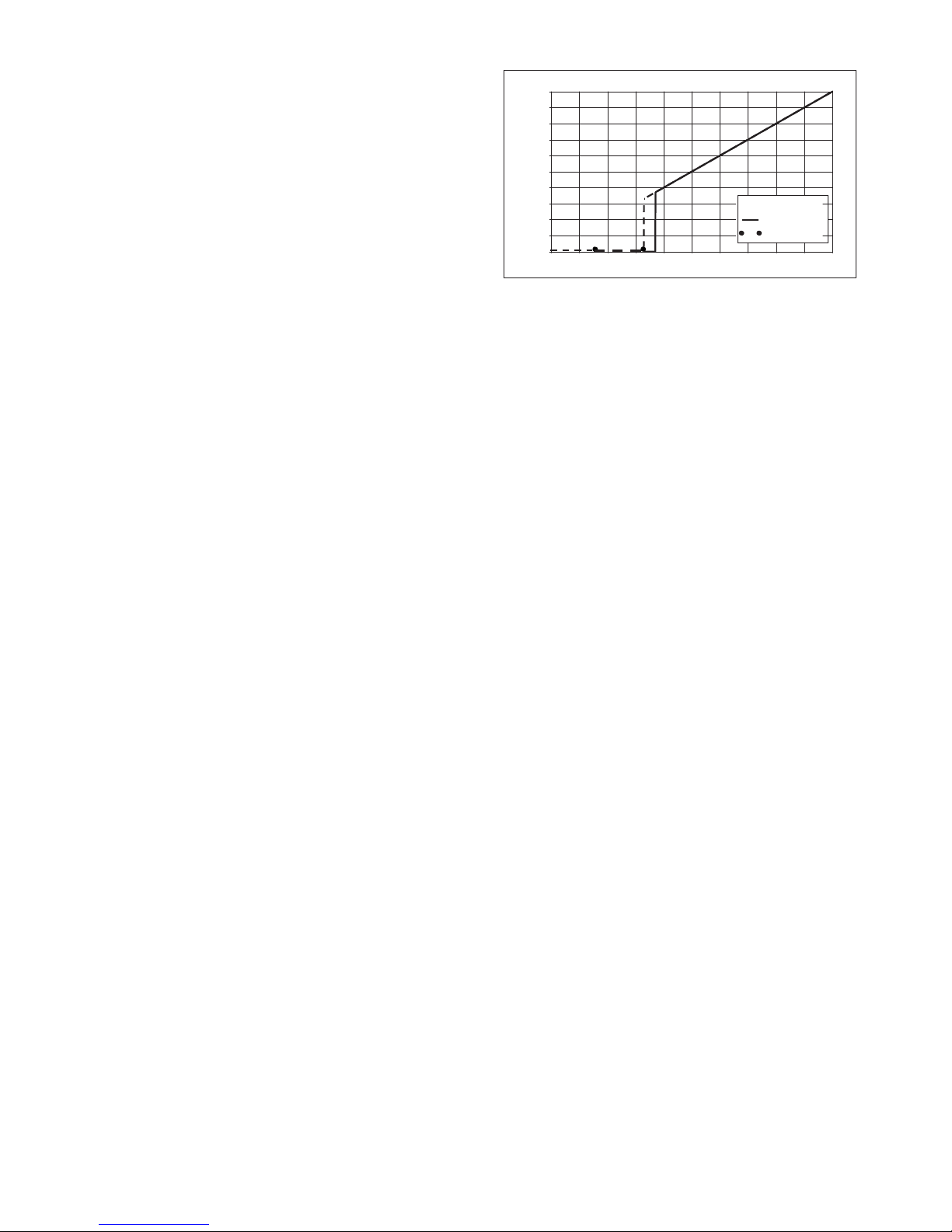
3.3 Sanftanlauf
Mittels Sanftanlauf erhöht der Regler innerhalb der
eingestellten Zeit die Motordrehzahl. Die Zeit für
das Hochlaufen von 0% auf 100% kann über die
ProgUNIT zwischen 8 und 60s frei eingestellt
werden (Default 12 s). Je höher der festgelegte
Prozentsatz des Gaskanals am Sender ist, desto
höher ist die eingeregelte Drehzahl.
KONTRONIK + SOBEK Drives empfiehlt, für ein
gutes Regelverhalten eine Regleröffnung von ca.
80% im Sender (100% entspricht dem vollen
Knüppelweg).
Damit ist gewährleistet, dass der Regler über
ausreichende Reserve verfügt, um die abfallende
Akkuspannung zu kompensieren.
3.4 Tiefentladungsschutz
Die KOSMIK Regler sind mit einem Tiefent-
ladungsschutz ausgestattet, der für jede
Zellenzahl und gewählten Modus die notwendigen
Parameter automatisch einstellt.
Je nach Modus wird der Motor abgeregelt oder
abgeschaltet, wenn die eingestellte Akkuentlade-
spannung erreicht ist. Die Abregelzeit im Heli
Modus ist fest eingestellt und beträgt ca. 30 s. Die
Abregelspannung/Zelle ist mit der ProgUNIT von
2,7 - 3,5 V (LiPo, default: 3 V), 1,8 - 2,6 V (LiFePo,
default: 2,3 V) und 0,7 - 1,2 V (NiCd/NiMH, default
0,8 V) in 0,1 V Schritten einstellbar.
Sobald die eingestellte Abregel- /Abschaltspan-
nung erreicht wird, leitet der KOSMIK entsprech-
end des programmiertes Modus die Unterspan-
nungsabregelung /-abschaltung automatisch ein.
Bitte laden Sie danach den Akku oder installieren
Sie einen geladenen Akku.
4. Allgemeines
Motoren und Akkus nur mit den beiliegenden,
vorkonfektionierten Kabeln am KOSMIK an-
schließen. Auf festen Sitz der Verschraubungen
achten. Kabel mit kleineren Querschnitten sind
unzulässig.
Bei voller Dauerleistung ist jeweils die
doppelte Anzahl an Kabeln und Steckern
zu verwenden (optional erhältlich).