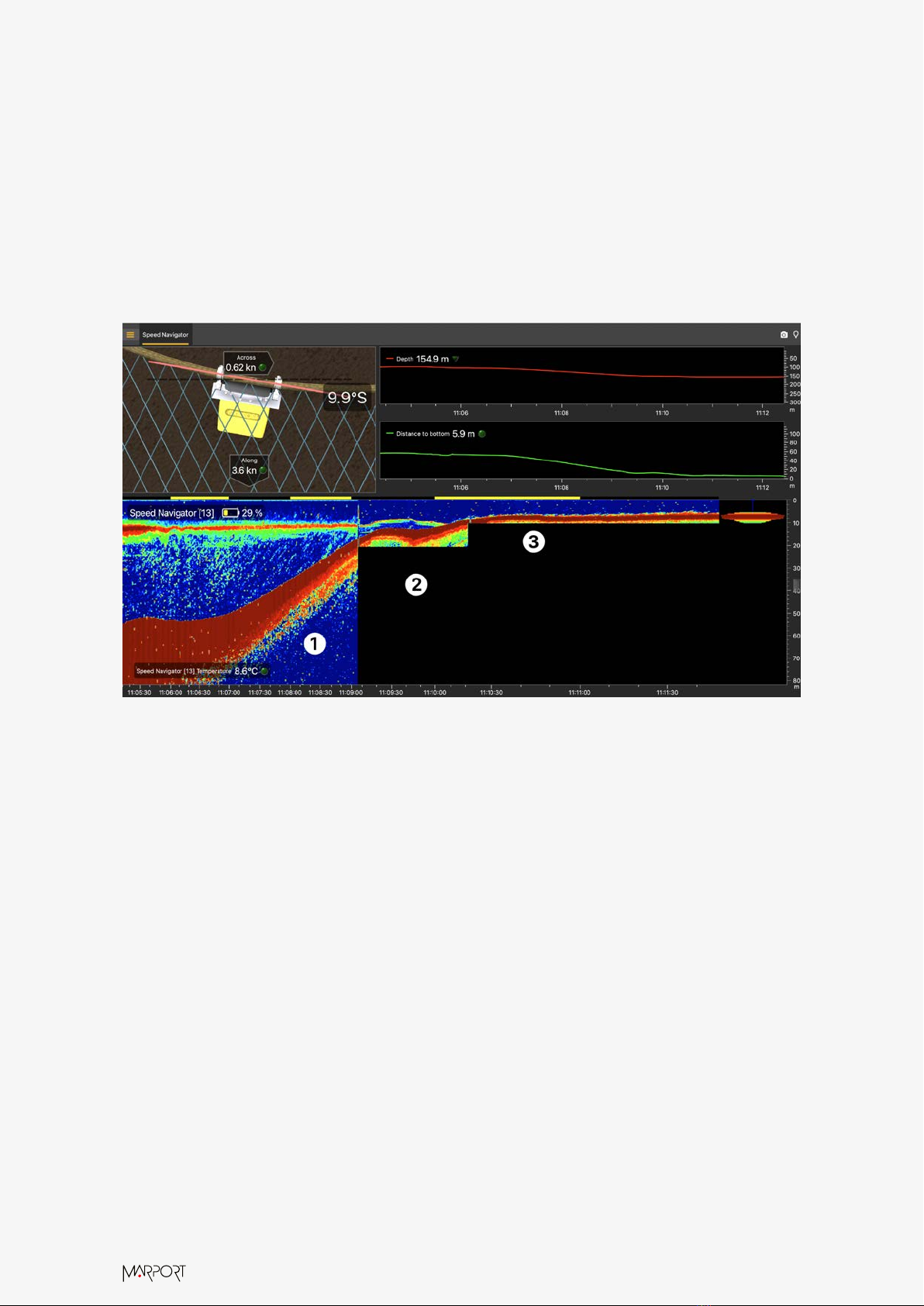
Measures •Battery (always activated)
•Across Speed (always activated)
•Along Speed (always activated)
•Pressure (depth)
•Temperature
•Pitch
•Roll
Technical Specifications
Uplink frequency 30 to 60 kHz
Range to vessel up to 2500 m*
Data update rate •5-meter range: Echogram @0.16 s - temperature, depth, pitch, roll,
battery level, along speed, across speed @8.07 s
•10-meter range: Echogram @0.31 s - temperature, depth, pitch,
roll, battery level, along speed, across speed @8.82 s
•20-meter range: Echogram @0.63 s - temperature, depth, pitch,
roll, battery level, along speed, across speed @8.79 s
•40-meter range: Echogram @0.84 s - temperature, depth, pitch,
roll, battery level, along speed, across speed @5.84 s
•80-meter range: Echogram @0.89 s - temperature, depth, pitch,
roll, battery level, along speed, across speed @6.22 s
•160-meter range: Echogram @0.99 s - temperature, depth, pitch,
roll, battery level, along speed, across speed @6.99 s
Depth range up to 1800 m
Depth resolution 0.1 m with 0.1% full scale accuracy
Echogram range 5 (auto) / 10 (auto) / 20 (auto) / 40 / 80 / 160 meters
Pitch and roll range -180° to +180°
Pitch & roll accuracy +/- 1°
Temp measurement range -5° C to +25° C
Temp accuracy ±0.1° C
Across speed range Up to ± 3 knots
Speed Navigator | V1 |
Introduction and Presentation 10