Echotrac CV100
User Manual
Page 3 of 3
Odom H
dro
raphic S
stems, Inc. Ma
28, 2008
CONTENTS
1Introduction...................................................................................................................................................... 5
1.1 Purpose....................................................................................................................................................... 6
1.2 Scope.......................................................................................................................................................... 6
1.3 Glossary...................................................................................................................................................... 6
1.4 References.................................................................................................................................................. 6
2Product description......................................................................................................................................... 7
2.1 Specifications.............................................................................................................................................. 7
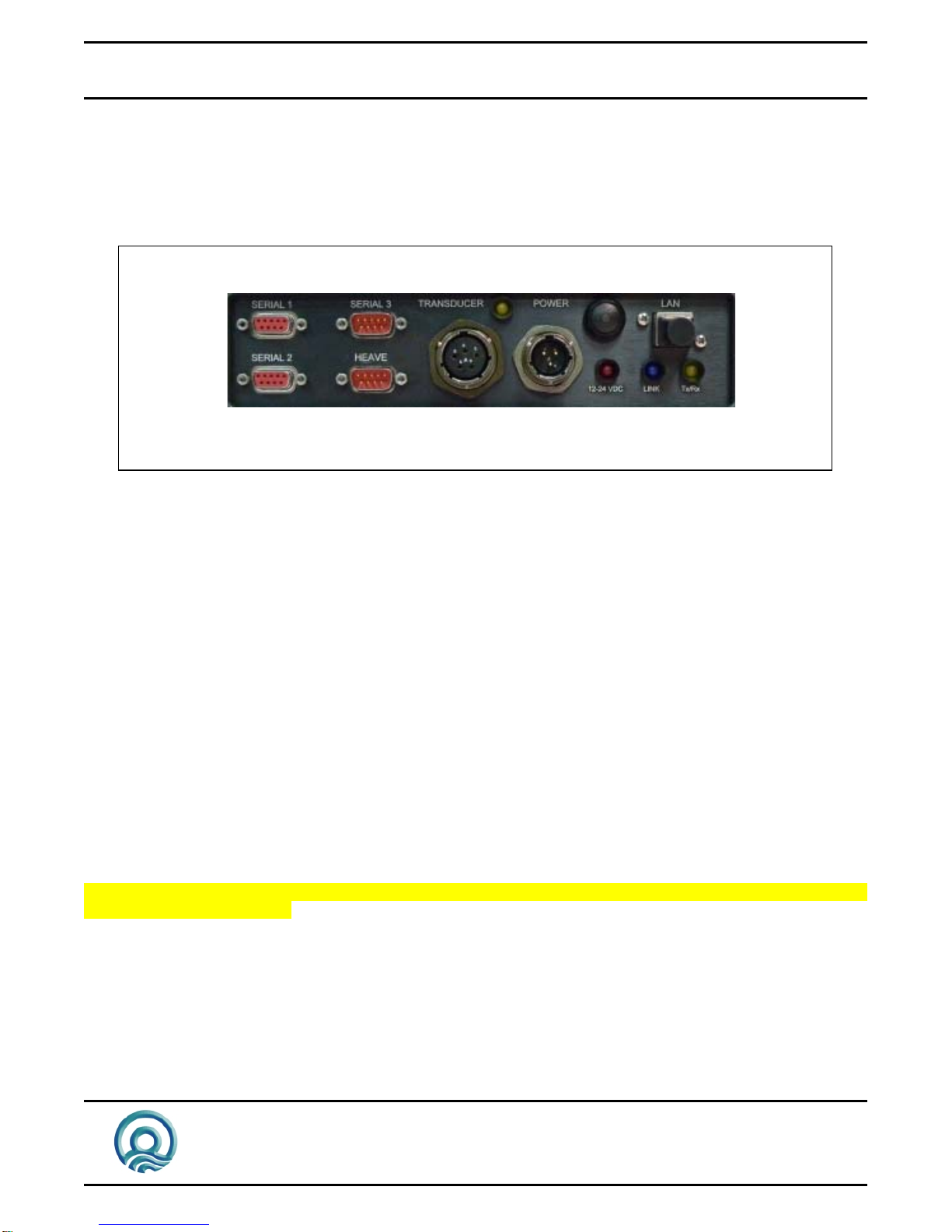
2.2 Overview ..................................................................................................................................................... 8
2.3 Cabling........................................................................................................................................................ 8
2.4 Power connector......................................................................................................................................... 8
2.5 Choice of operating frequencies ................................................................................................................. 9
2.6 Signal connector Transducer...................................................................................................................... 9
2.7 Serial Ports................................................................................................................................................ 10
2.8 LAN ........................................................................................................................................................... 10
2.9 Power button............................................................................................................................................. 10
2.9.1 Power-OFF ........................................................................................................................................ 10
2.9.2 Power-ON .......................................................................................................................................... 10
2.9.3 STANDBY.......................................................................................................................................... 10
2.10 Power indicator...................................................................................................................................... 10
2.11 Ethernet indicators................................................................................................................................. 11
2.12 Transmit indicators ................................................................................................................................ 11
3Installation...................................................................................................................................................... 12
3.1 Software installation.................................................................................................................................. 12
3.2 Setting up the equipment.......................................................................................................................... 12
3.3 Powering up the equipment ...................................................................................................................... 13
3.4 Transducer installation.............................................................................................................................. 14
3.4.1 “THROUGH HULL” transducer installation........................................................................................ 14
3.4.2 "SEA CHEST" transducer installation................................................................................................ 15
3.4.3 "OVER-THE-SIDE" transducer installation........................................................................................ 16
4Operational procedures................................................................................................................................ 17
4.1 Things to consider when calibrating.......................................................................................................... 17
4.2 How to calibrate the Echotrac CV............................................................................................................. 17
4.3 How to perform a bar check...................................................................................................................... 19
4.4 Shallow Water Operation.......................................................................................................................... 20
5Troubleshooting ............................................................................................................................................ 21
5.1 The Echotrac CV does not seem to be working........................................................................................ 21
5.2 The Echotrac CV power LED is off ........................................................................................................... 21
5.3 The Echotrac CV power LED is flickering................................................................................................. 21
5.4 What are the COM-port settings ............................................................................................................... 21
5.5 Known problems with Transducer............................................................................................................. 21
6Technical specifications............................................................................................................................... 23
6.1 Computer communications ....................................................................................................................... 23
6.2 Overview Serial Output string formats...................................................................................................... 24
6.3 Serial output strings .................................................................................................................................. 26
6.3.1 Echotrac SBT..................................................................................................................................... 26
6.3.2 Echotrac DBT..................................................................................................................................... 27