Table of contents" #....................................................................................................................................2
1. Safety requirements" #...........................................................................................................................4
2. Operation principle" #.............................................................................................................................5
2.1.Features and advantages!..............................................................................................................................................5
3. Product description" #............................................................................................................................6
3.1.Optical specifications!....................................................................................................................................................6
3.2.Mechanical specifications!.............................................................................................................................................6
3.3.Electronic specifications!................................................................................................................................................6
3.4.Conditions!....................................................................................................................................................................6
3.5.Controller!......................................................................................................................................................................7
3.5.1.Interfaces, pinout!..................................................................................................................................................7
3.5.2.LEDs, Buttons functions!.......................................................................................................................................7
3.5.3.Mounting!..............................................................................................................................................................8
3.6.Voltage levels!................................................................................................................................................................8
3.7.What’s in the box?!........................................................................................................................................................8
4. Software" #.............................................................................................................................................8
4.1.Minimum Hardware requirements (recommended)!........................................................................................................8
4.2.System requirements!....................................................................................................................................................8
4.3.Supported client operating systems!..............................................................................................................................8
4.4.Installing the software!...................................................................................................................................................8
4.5.Using the software!......................................................................................................................................................10
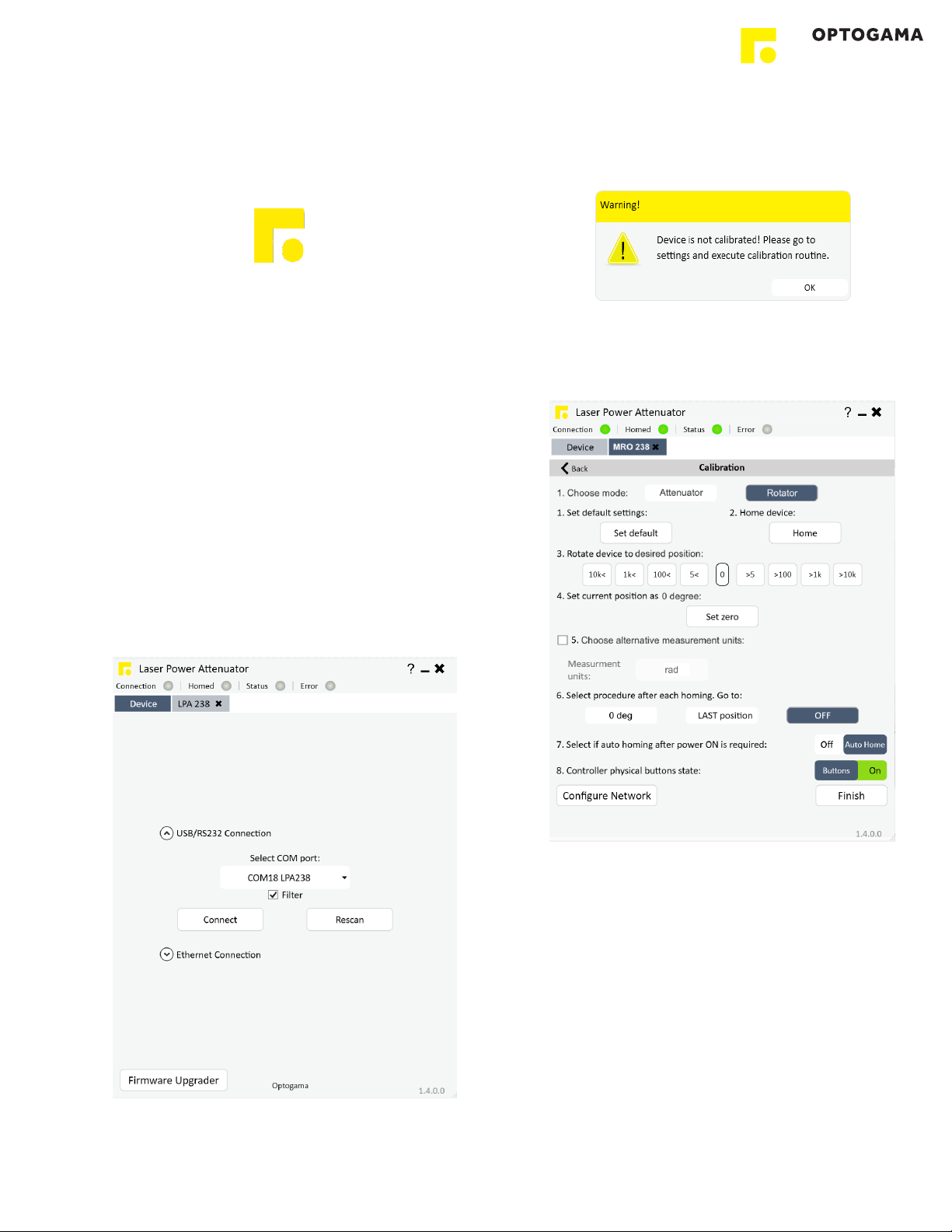
4.5.1.Connection!............................................................................................................................................................10
4.5.2.Settings, calibration!................................................................................................................................................10
4.5.3.Main window!..........................................................................................................................................................11
4.6.Ethernet connection!...................................................................................................................................................12
4.6.1.About TCP/IP pMROocol!.......................................................................................................................................12
4.6.2.Client and Server Connection!.................................................................................................................................12
4.6.3.Ethernet configuration using MRO software!...........................................................................................................13
4.6.4.Ethernet connection using MRO software!..............................................................................................................13
4.6.5.Ethernet configuration using commands!................................................................................................................14
4.7.Updating the firmware!................................................................................................................................................15
4. Commands" #......................................................................................................................................16
4.1.Interface!.....................................................................................................................................................................16
4.2.Description!.................................................................................................................................................................16
5. Troubleshooting" #................................................................................................................................19
5.1.STATUS bits explanation!.............................................................................................................................................19
5.2.Serial communication example in Python!....................................................................................................................20
6. Technical information" #.......................................................................................................................21
6.1.MRO drawings!............................................................................................................................................................21
6.2.MRO controller drawing!..............................................................................................................................................22
6.3.Power supply!..............................................................................................................................................................23
6.4.RS232 cables!.............................................................................................................................................................24