5. XCSoar
XCSoar is free open source soft are optimized for Android systems ith a touch screen and comes pre-installed
on the XCTouchNav. To launch the preinstalled XCSoar ipe screen once to the right in order to see installed
apps, then tap on the icon for XCSoar to start the application.
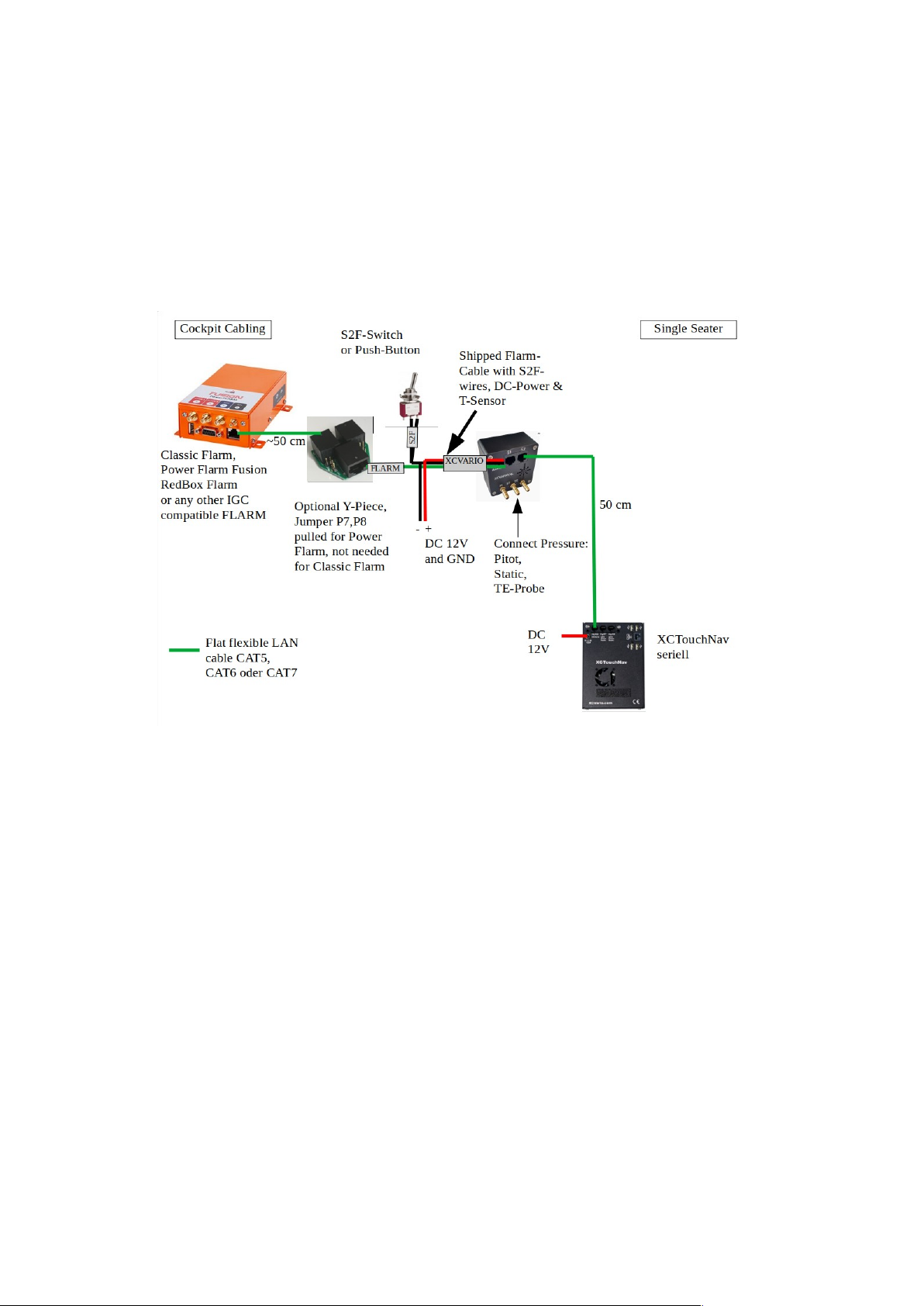
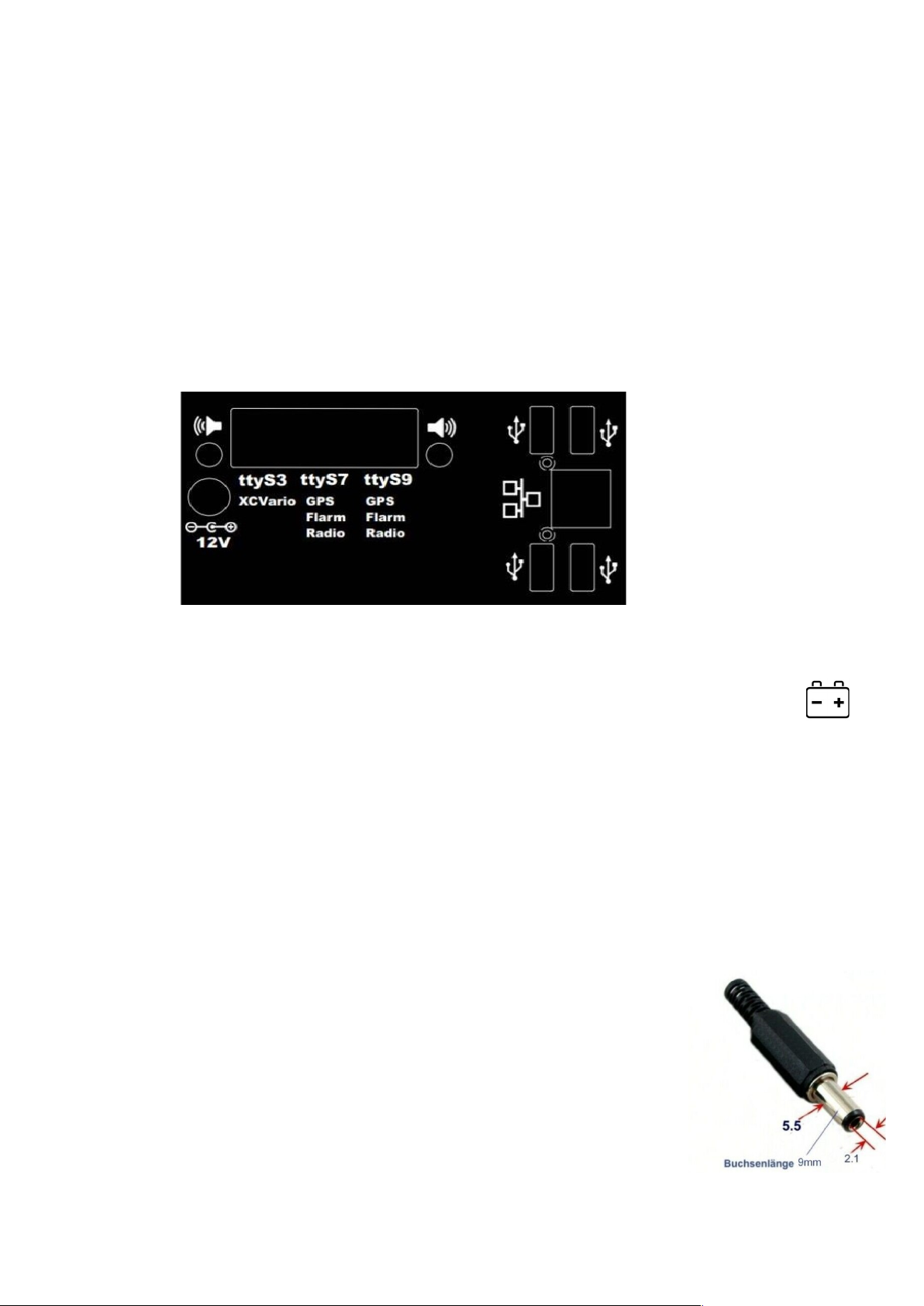
For a complete glider flight computer, ho ever, further values such as GPS fixes, the dynamic pressure, TE
nozzle pressure, static pressure are needed in order to be able to get an indication for an optimal speed to fly,
precise final glide or moving map. The XCVario ith a FLARM connected delivers exactly this data that can be
provided by a RS232 serial cable connection (recommended ay) or ireless via WiFi or Bluetooth.
If you don’t o n a FLARM, there is a cheap GPS module provided in the shop, that can be used instead of
FLARM.
Mean hile smartphones or tables are available on the market and may be suitable in terms of display brightness,
contrast and feature a touchscreen, those devices may have issues at higher temperatures and ill shut do n in the
cockpit already before flight hen canopy is closed and temperatures rises above 40° C. The XCTouchNav
operates directly on the 12V on board grid, no DC converter is needed, is tested until 70° C and on’t face you
ith the danger to shut do n from a lipo battery overheat.
With the XCTouchNav, advanced technology is available at an affordable price.
XCTouchNav running XCSoar, offers a perfect glider computer ith the latest technology, quad core CPU,
intuitive touchscreen operation, many screens full of features, flight planning, final approach and freely
configurable info boxes, beside display of terrain ith airspace including side vie . Of course topography and
landing fields are easy to be setup. There is a thermal assistant for centering thermals, audio variometer ith ith
external speakers, speed to fly command according to your MC setting or assistance for dolphin cross country
speed and more.
6. Bluetooth
In order to establish a connection via Bluetooth, the XCTouchNav needs to pair ith the device.
To do this, perform a device scan in the Android device setup under Bluetooth, and pair your
device e.g. an XCVario variometer, hich should appear there in the device list as e.g. XCVario-
5678, in the pairing dialog.
If a Bluetooth pass ord is requested for an older device, try to enter "1234", ne er Bluetooth
standards on’t require this.
Then in XCSoar under Configuration/NMEA connection, setup a ne device A..F. Any paired device can be
found in the 'Connection' field ith its Bluetooth ID. Select this there and in the follo ing dialog enter the desired
driver, for current XCVario versions "XCVario". The s itch K6Bt remains in the 'off' position. After you have
ackno ledged the dialog ith “OK”, XCSoar ill connect to the device ithin a fe seconds, hich ill then
appear as a regular NMEA connection, e.g. ith the status “connected: Baro,Vario,Environment[,FLARM]”.
The relevant records of the device should no be visible under 'Monitor'. For details regarding the data there
please refer to the manufacturers handbook for the corresponding device. You can paired several different
Bluetooth devices via Bluetooth protocol.
Page 7