8
©2015 Horizon Hobby, LLC
Blade and SAFE are registered trademarks of Horizon Hobby, LLC.
The Spektrum trademark is used with permission of Bachmann Industries, Inc.
All other trademarks, service marks and logos are property of their respective owners. Patents pending.
Created 8/15 50283
Regolazioni Servo
Il elicottero è stato regolato in fabbrica e con la prova in volo. La regolazione dei servi è
necessaria solo in particolari circostanze, come, ad esempio, dopo un incidente o nel caso si
debba cambiare un servo o i rinvii.
AVVERTENZA: per motivi di sicurezza bisogna sempre scollegare i fili del motore
dal’ESC prima di procedere con i passi seguenti. Dopo aver terminato le regolazio-
ni, ricollegare i fili del motore all’ESC prima di far volare il modello.
Entrare nella modalità di regolazione dei servi
1. Abbassare completamente lo stick del motore.
2. Accendere il trasmettitore.
3. Installare la batteria di bordo sull’elicottero, fissandola con la fascetta a strappo.
4. Collegare il connettore della batteria all’ESC.
5. Mettere l’elicottero su di una superficie piana e lasciarlo fermo finché il LED arancio del
ricevitore non si accende fisso, indicando che l’inizializzazione è terminata.
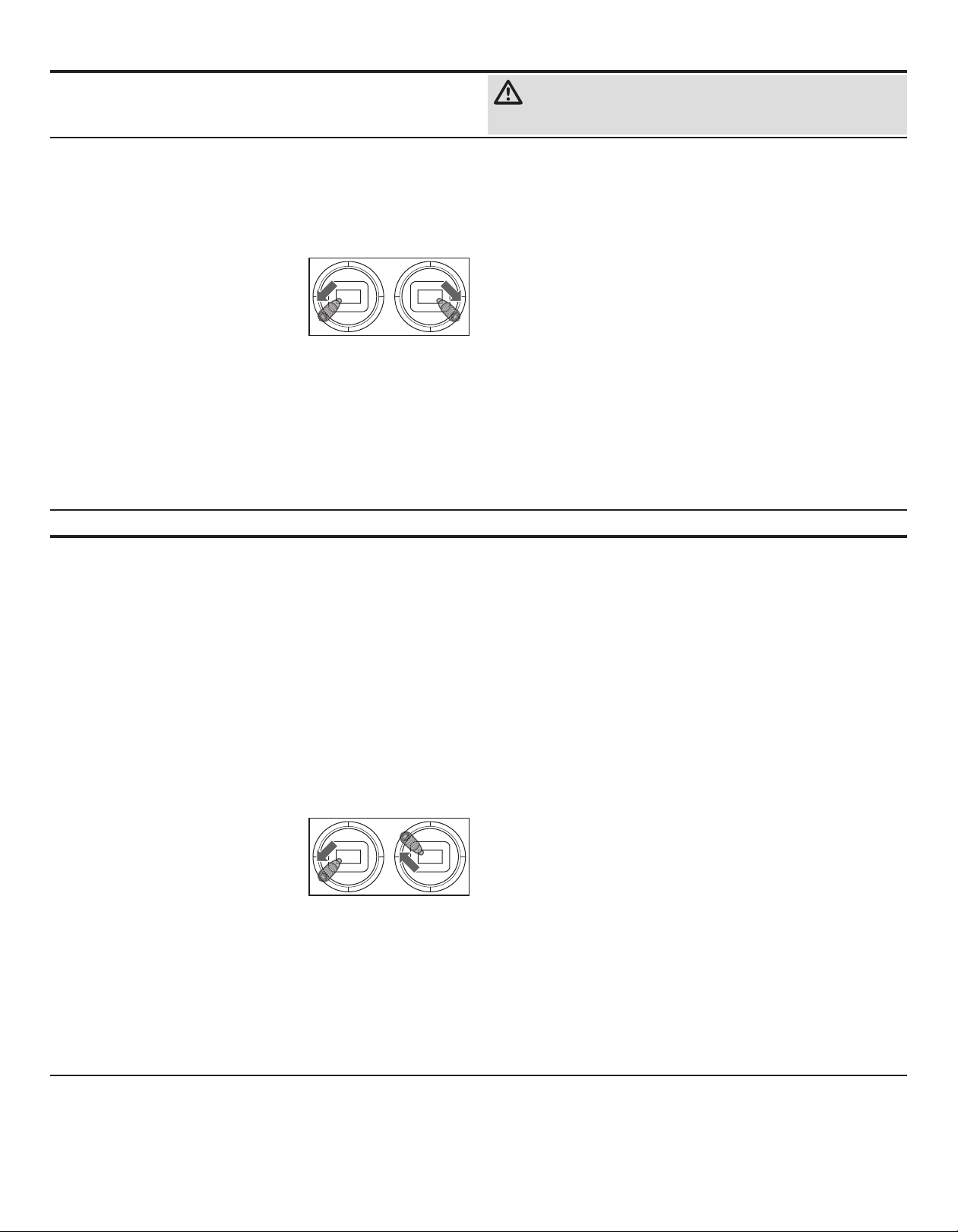
6. Portare lo stick di sinistra in basso a sinistra e lo
stick di destra in basso a destra e mantenerli in
questa posizione, come illustrato.
7. Tenere premuto l’interruttore Bind/Panic finché non
si muovono i servi del piatto.
8. Rilasciare gli stick e l’interruttore Bind/Panic.
Adesso il modello si trova nella modalità di
regolazione dei servi (Servo Adjustment Mode).
9. Procedere nelle regolazioni dei servi per fare i cambiamenti desiderati.
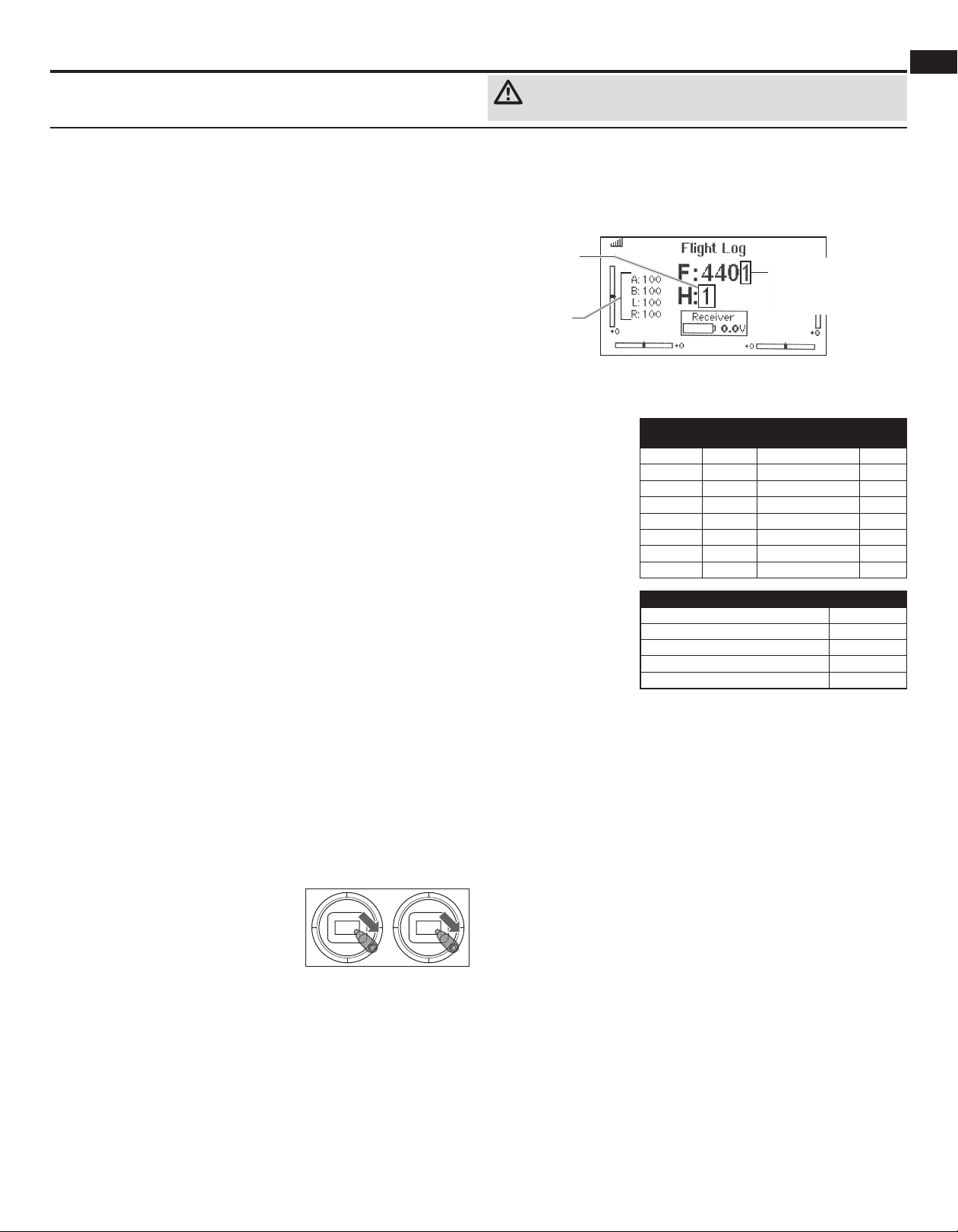
Regolazione del punto neutro dei servi
Con il modello nella modalità di regolazione dei servi, i comandi provenienti dagli stick e
dal giroscopio sono disabilitati e i servi sono fissi nella posizione neutra. Verificare che le
squadrette dei servi siano perpendicolari ai servi.
• Se le squadrette sono perpendicolari ai servi, non è necessario fare regolazioni. Quindi si
può uscire da questa modalità (Exit Servo Adjustment Mode).
• Se una o più squadrette dei servi non è perpendicolare al servo stesso, continuare la
procedura di regolazione.
Guardando i servi del piatto oscillante, dare comando del ciclico a destra e rilasciare. Uno dei
servi avrà un sussulto, indicando quello selezionato. Premere il ciclico a destra e rilasciare
finché si trova il servo che deve essere regolato.
Una volta scelto il servo da regolare, muovere lo stick del ciclico avanti o indietro per regolare
la posizione neutra del servo nella direzione desiderata.
Se si vuole riportare il servo in oggetto alla posizione neutra di default, tenere lo stick del
timone completamente a destra per 1 secondo.
Il campo di regolazione è limitato. Se non si riesce a portare la squadretta perpendicolare al
servo, bisogna riportare il servo alla posizione neutra di default, togliere la squadretta e ri-
metterla cercando di trovare la posizione più perpendicolare possibile. Adesso si può regolare
la posizione neutra del servo usando il movimento avanti/indietro dello stick del ciclico.
Livellamento del piatto oscillante
Prima di salvare le regolazioni fatte e uscire dalla modalità di regolazione del servo, verificare
che il piatto oscillante sia livellato e che entrambe le pale del rotore principale siano a 0
gradi. Se così non fosse, regolare i rinvii meccanici secondo necessità.
1. Abbassare completamente lo stick del motore e rilasciare gli stick.
2. Tenere premuto l’interruttore I finché i servi del piatto si muovono.
3. Rilasciare l’interruttore I per salvare le regolazioni dei servi.
4. Ricollegare il motore all’ESC. Il modello adesso è pronto per il volo.
Tutte le regolazioni vengono memorizzate internamente così che vengono richiamate tutte le
volte che si inizializza il modello.
Volo di trimmaggio
Eseguire questa procedura soltanto se il modello non vola bene o se è appena stato
ricostruito dopo un incidente.
La procedura di volo di trimmaggio è stata eseguita in fabbrica durante il volo di prova e
deve essere eseguita di nuovo solamente se il modello non si livella consistentemente o se
non rimane fermo durante il volo stazionario. Il volo di trimmaggio serve per stabilire le im-
postazioni SAFE durante il volo. Il volo di trimmaggio deve essere eseguito in condizioni
ambientali calme.
Entrare nella modalità volo di trimmaggio
1. Abbassare lo stick motore completamente.
2. Centrare tutti i trim. La trasmittente Spektrum DXe inclusa nella confezione RTF, segnala
che tutti i trim sono centrati emettendo un tono acuto quando premete il tasto trim.
Spostare il trim in entrambe le direzioni fino a quando sentite il tono acuto.
3. Accendere la trasmittente.
4. Installare la batteria di volo nell’elicottero.
5. Connettere il connettore della batteria all’ESC.
6. Posizionare l’elicottero su di una superficie piana e non muoverlo fino a quando il
motore emette due toni e il LED dell’ESC si accende blu fisso, indicando che il processo
di inizializzazione è completo.
7. Posizionare l’elicottero nel punto di partenza desiderato.
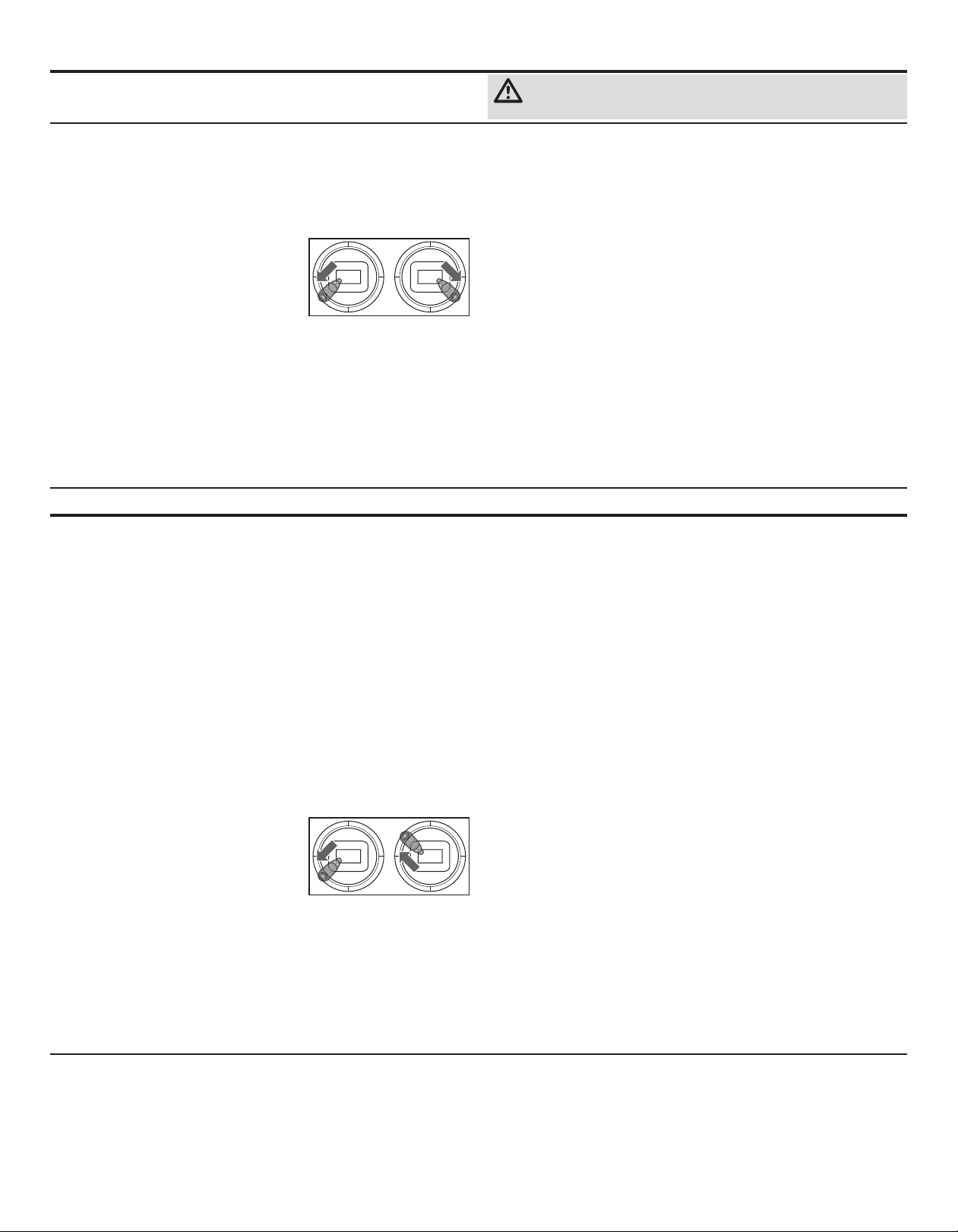
8. Muovere e tenere lo stick sinistro nell’angolo in
basso a sinistra e lo stick destro nell’angolo in alto
a sinistra, come illustrato.
9. Tenere premuto il tasto bind/anti-panico fino a
quando il piatto ciclico gira una volta.
10. Rilasciare gli stick e il tasto bind/anti-panico.
11. Il modello è pronto per il volo di trimmaggio.
Eseguire il volo di trimmaggio
1. Aumentare lentamente il motore per alzare il modello in un hover stazionario. Effettuare
le regolazioni necessarie per tenere il modello fermo. La valutazione inizia soltanto
quando lo stick motore supera il 50% e gli stick sono centrati. Eventuali correzioni non
influenzeranno il risultato ma possono richiedere un volo più lungo.
2. Mantenere il modello in un hover stazionario per 30 secondi. Movimenti molto lenti vanno
bene. La cosa più importante è mantenere livellato il disco rotore.
3. Una volta contenti del volo di trimmaggio, potete far atterrare il modello.
Uscire dalla modalità volo di trimmaggio
1. Dopo l’atterraggio, abbassare lo stick motore completamente.
2. Tenere premuto il tasto bind/anti-panico per 2 secondi o fino a quando il piatto ciclico
guizza, indicando che le posizioni dei servocomandi e i valori dell’assetto di volo sono
stati registrati e la modalità di volo di trimmaggio è stata abbandonata.
Volo di prova
Dopo aver eseguito il volo di trimmaggio, provare a volare il modello per valutare le caratteri-
stiche di livellamento.
• Il modello dovrebbe tornare nel volo livellato consistentemente.
• Durante il decollo, il modello dovrebbe alzarsi con un minimo di correzioni.
• Durante un hover, lo stick di comando dovrebbe restare vicino alla posizione centrale.
Piccole regolazioni sono ammissibili.
Se il modello non vola bene o non si livella bene dopo il volo di trimmaggio, rifare l’intera
procedura del volo di trimmaggio da capo. Se il problema persiste, controllare se ci sono
delle componenti rotte nel modello, per esempio un albero piegato o altro che potrebbe
causare maggiori vibrazioni. È possibile che il volo di trimmaggio non salvi i valori corretti
per via di vibrazioni eccessive, troppo vento o il mancato livellamento del modello. In questo
caso, potrebbe essere necessario eseguire dei voli di trimmagggio più corti. Provare prima
il volo di trimmaggio livellato di 30 secondi senza correzioni, come menzionato prima. Se
le caratteristiche di livellamento non sono soddisfacenti, accorciare gradualmente i voli di
trimmagio, individuando possibili miglioramenti, fino a quando il modello vola come descritto
qui a sinistra.