UCPIC-7
- Pin0 : 0.1 has function to set the direction of rotation of the motor.
- Pin1 : 1.0 has function to set the direction of rotation of the motor.
- Pin2 : It has the function of motor. Use the "pwmout" instruction. to regulate engine speed.
- Pin4 : It has the function of potentiometer. To read its value use the readadc 4 instruction (variable where we store the
value). Its value can range from 0 to 256 according to our needs.
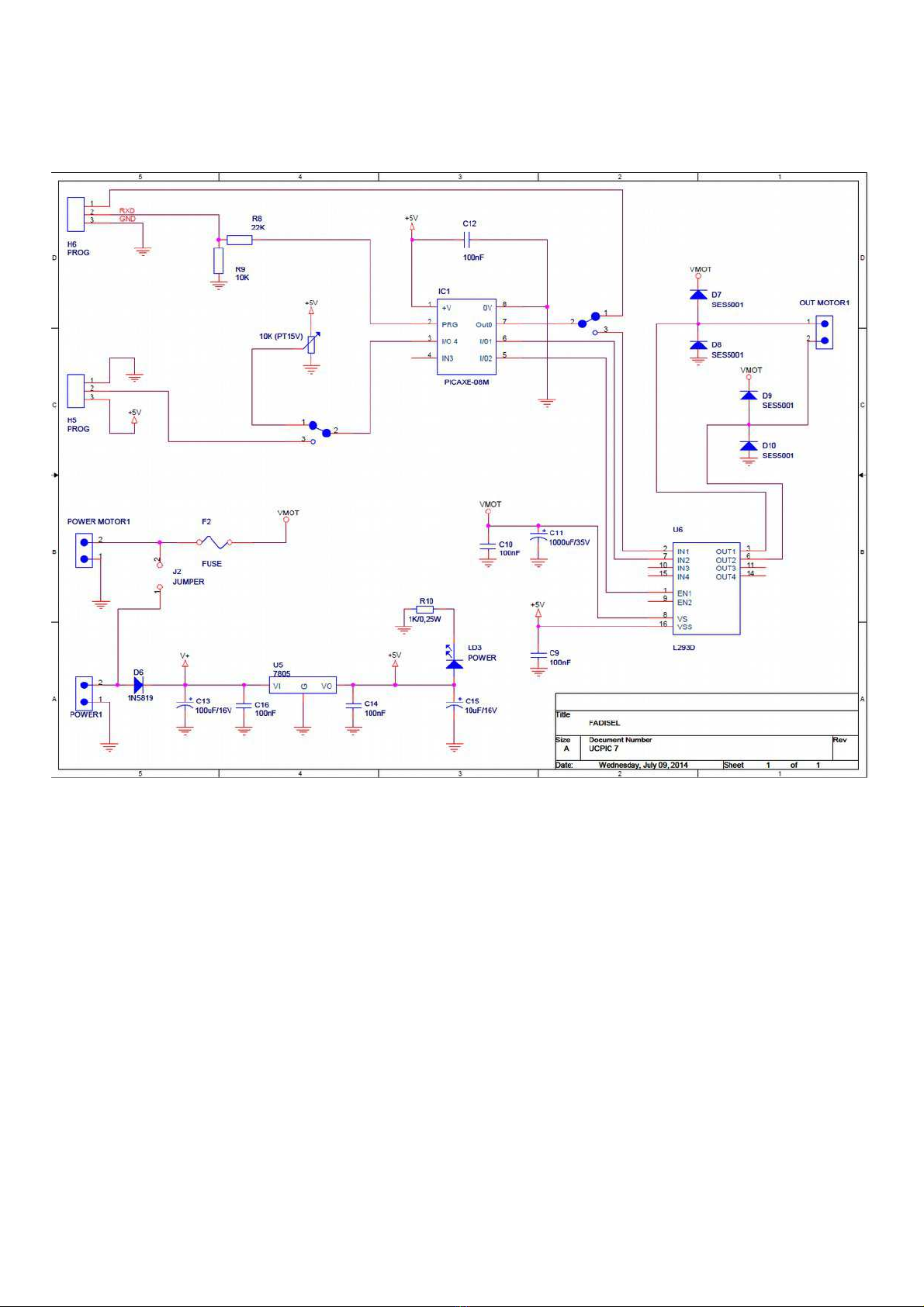
Equiv. Pin versus PICAXE 08 2 PIN0=7 PIN1=6 PIN2=5 PIN4=3
NO E : PIN 0 incorporates selection switch for recording-work
NO E : Maximum PIN 4 Permissible voltage: 5V DC
- Pin0 : 0,1 a fonction pour définir le sens de rotation du moteur.
- Pin1 : 1.0 a fonction pour définir le sens de rotation du moteur.
- Pin2 : Il a la fonction du moteur. Utilisez l'instruction "pwmout". pour réguler la vitesse du moteur.
- Pin4 : Il a la fonction du potentiomètre. Pour lire sa valeur utiliser le readadc 4 instruction (variable à laquelle nous
stockons la valeur). Sa valeur peut aller de 0 à 256, selon nos besoins.
Equiv. Pin versus PICAXE 08 2 PIN0=7 PIN1=6 PIN2=5 PIN4=3
NO E : PIN 0 intègre commutateur de sélection pour l'enregistrement travail
NO E : PIN maximum 4 ension admissible: 5V DC
- Pin0 : Tiene función 0,1 para configurar sentido de giro del motor .
- Pin1 : Tiene función 1,0 para configurar sentido de giro del motor .
- Pin2 : Tiene la función de motor. Utiliza la instrucción “pwmout”. para regular velocidad motor.
- Pin4 : Tiene la función de potenciómetro. Para leer su valor utilizaremos la instrucción readadc 4, (variable donde
guardaremos el valor). Su valor puede variar de 0 a 256 según nuestras necesidades.
Equiv. Pin versus PICAXE 08 2 PIN0=7 PIN1=6 PIN2=5 PIN4=3
NO A : PIN 0 incorpora conmutador para selección grabación-trabajo
NO A : ensión máxima admisible PIN 4 : 5V DC
PRAC ICE 1
2
Put switch S4 in position to load the program record, finishing work put position.
In this program we rotate the motor in both directions as 0 or 1, the value of PIN 0 and PIN 1 revolve in one way or
another .
Mettez l'interrupteur S4 en position pour charger l'enregistrement du programme, la finition position de travail de vente.
Dans ce programme, nous faisons tourner le moteur dans les deux sens que 0 ou 1, la valeur du code PIN 0 et PIN 1
tournent d'une manière ou d'une autre .
Poner conmutador S4 en posición grabar para cargar el programa, al terminar poner posición trabajo .
En este programa hacemos girar el motor en los dos sentidos según sea 0 o 1 el valor de los PIN 0 y PIN 1 girara en
un sentido u otro .