Contents
1. Before you start............................................................................................................................................................. 4
1.1. Precaution and afety...............................................................................................................................................................................4
1.2. Updates.....................................................................................................................................................................................................4
1.3. Important Notes........................................................................................................................................................................................4
. Abbreviations................................................................................................................................................................. 5
3. Technical data................................................................................................................................................................ 6
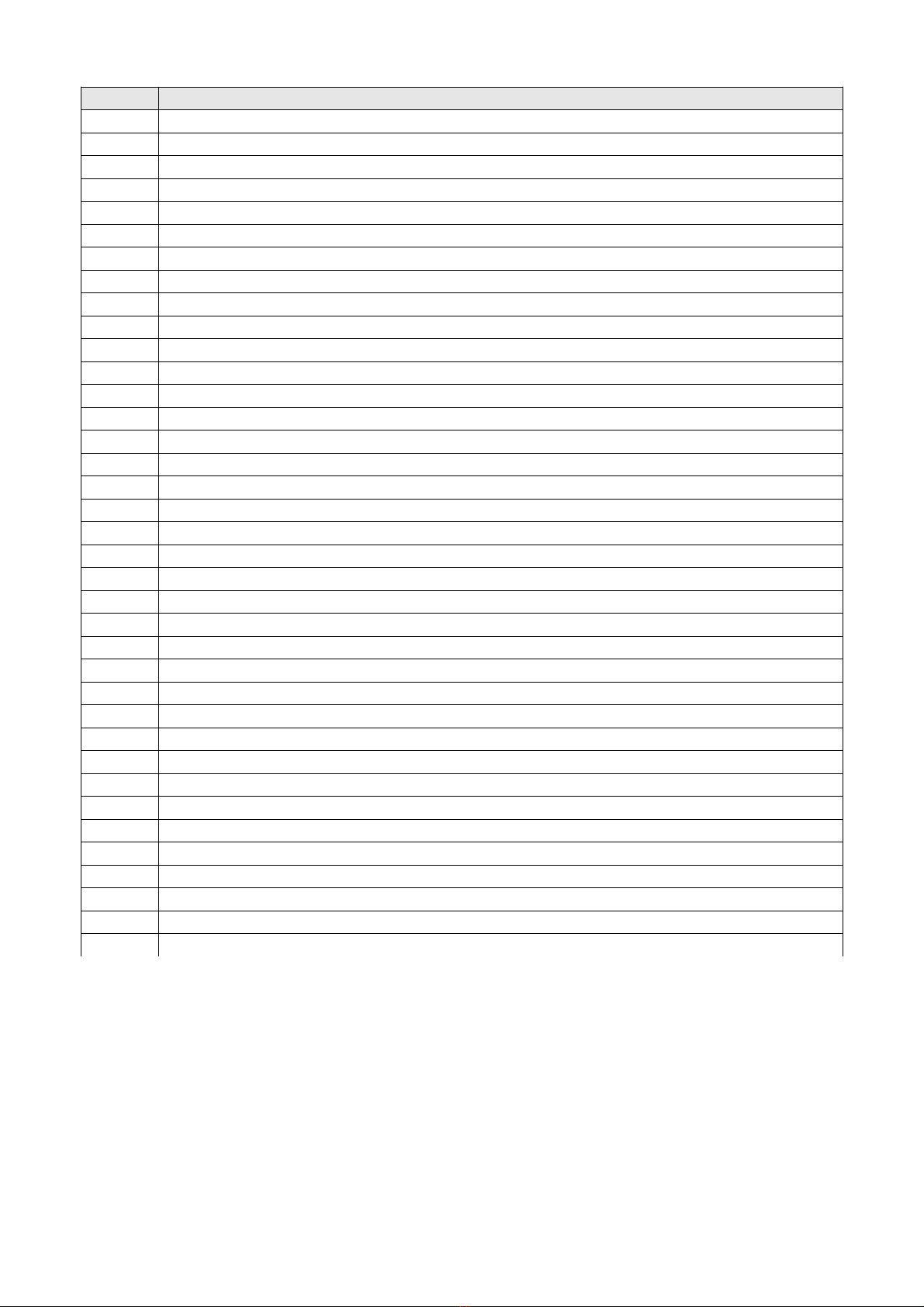
4. Mechanical dimensions................................................................................................................................................7
5. Sensor interface............................................................................................................................................................. 8
5.1. Connector..................................................................................................................................................................................................8
5.2. Pin table....................................................................................................................................................................................................8
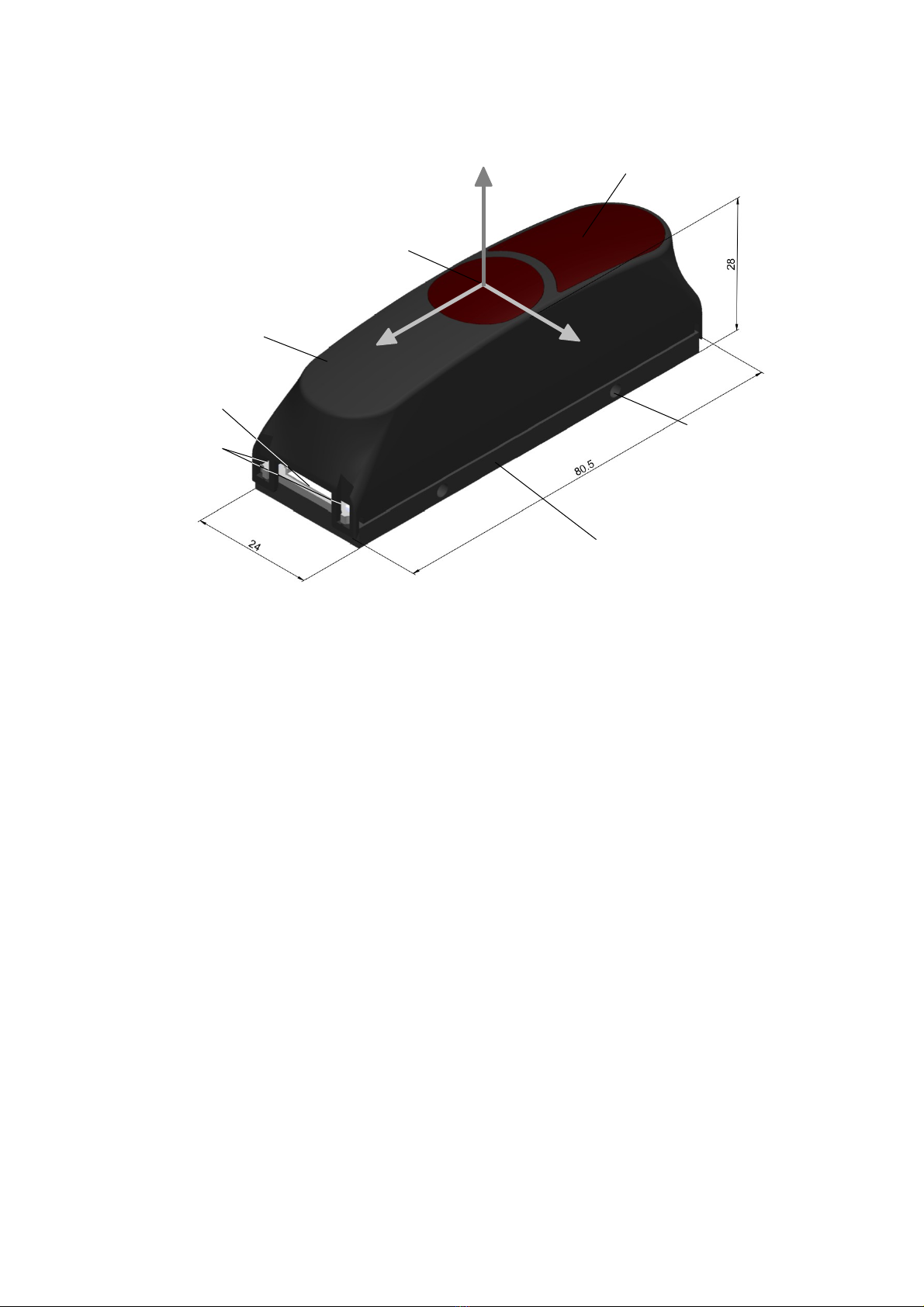
6. Power up......................................................................................................................................................................... 9
7. Communication interface.............................................................................................................................................. 9
7.1. Hardware interface....................................................................................................................................................................................9
7.2. oftware interface.....................................................................................................................................................................................9
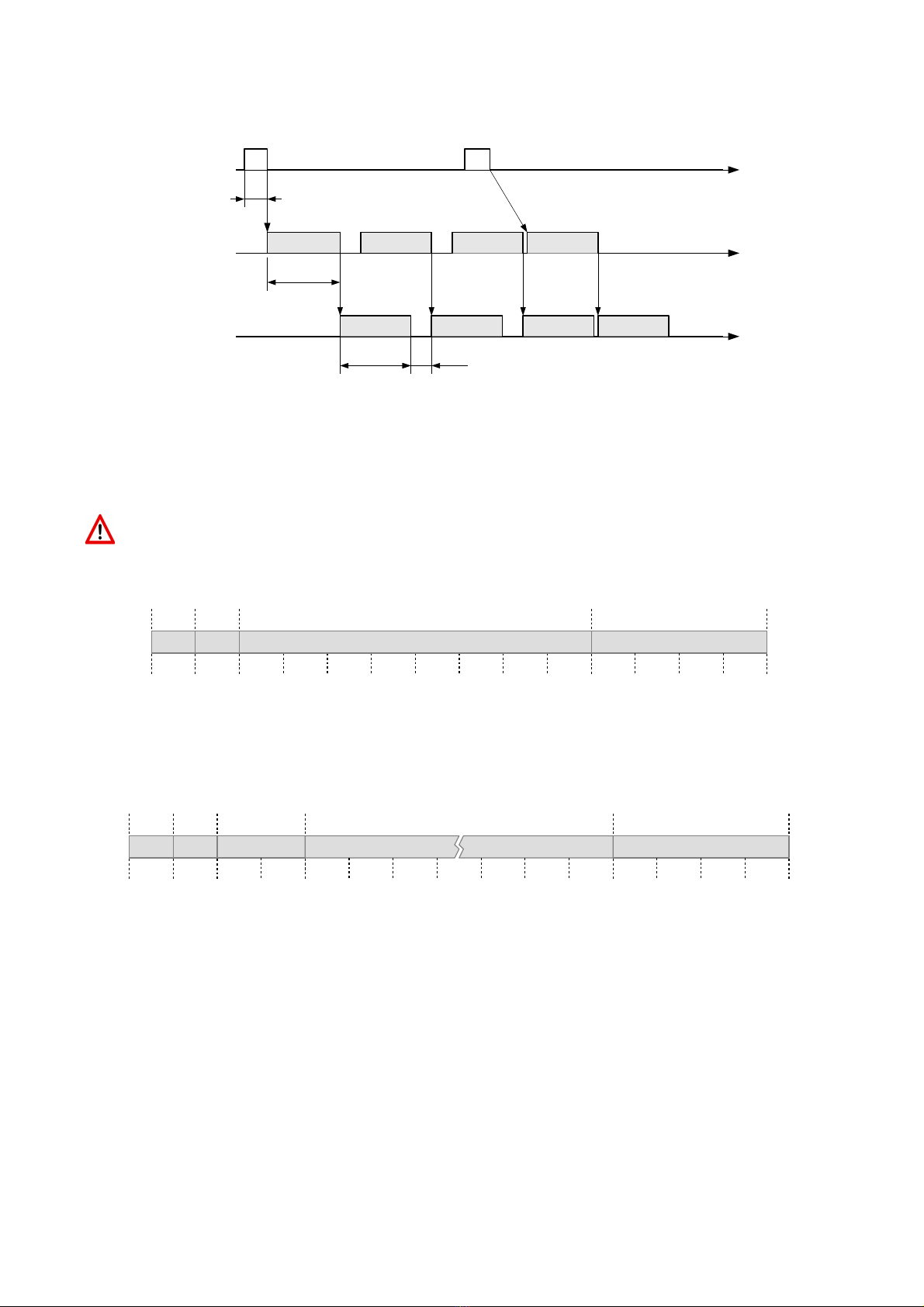
7.3. Command format....................................................................................................................................................................................10
7.4. Response format.....................................................................................................................................................................................10
7.5. CRC checksum.......................................................................................................................................................................................10
7.6. Acknowledge ACK (response)................................................................................................................................................................11
7.7. Error handling.........................................................................................................................................................................................11
8. Command set overview............................................................................................................................................... 1
8.1. ET commands......................................................................................................................................................................................12
8.2. GET commands......................................................................................................................................................................................12
8.3. Miscellaneous commands......................................................................................................................................................................12
8.4. Factory maintenance commands............................................................................................................................................................14
9. SET commands............................................................................................................................................................ 15
9.1. ET_MOD_CHANNEL [0x0E] .............................................................................................................................................................15
9.2. ET_INT_TIME_DI T [0x00] ..............................................................................................................................................................16
9.3. ET_INT_TIME_G [0x01] .................................................................................................................................................................16
9.4. ET_OPERATION_MODE [0x04] .......................................................................................................................................................17
9.5. ET_HDR [0x0D] .................................................................................................................................................................................17
9.6. ET_ROI [0x02] ...................................................................................................................................................................................18
9.7. ET_TEMPORAL_FILTER_WFOV [0x07] ..........................................................................................................................................18
9.8. ET_TEMPORAL_FILTER_NFOV [0x0F] ..........................................................................................................................................18
9.9. ET_AVERAGE_FILTER [0x0A] .........................................................................................................................................................19
9.10. ET_MEDIAN_FILTER [0x0B] ............................................................................................................................................................19
9.11. ET_INTERFERENCE_DETECTION [0x11] ......................................................................................................................................19
9.12. ET_EDGE_DETECTION [0x10]..........................................................................................................................................................20
9.13. ET_FRAME_RATE [0x0C] ................................................................................................................................................................20
9.14. ET_AMPLITUDE_LIMIT [0x09] .........................................................................................................................................................20
9.15. ET_OFF ET [0x08] ...........................................................................................................................................................................20
9.16. TOP_ TREAM [0x28 ] ......................................................................................................................................................................20
9.17. ET_COMPEN ATION [0x41] ............................................................................................................................................................20
9.18. ET_ILLUMINATION_POWER [0x6C] ...............................................................................................................................................21
9.19. ET_DLL_ TEP [0x06] .......................................................................................................................................................................22
10. GET commands........................................................................................................................................................... 3
10.1. Acquisition modes...................................................................................................................................................................................23
10.2. Acquisition data output formats..............................................................................................................................................................23
10.3. Response header....................................................................................................................................................................................24
10.4. Warm-up.................................................................................................................................................................................................26
10.5. GET_DI T [0x20] .................................................................................................................................................................................26
10.6. GET_DI T_G [0x0A] .........................................................................................................................................................................27
10.7. GET_DI T_AMPLITUDE [0x22] ..........................................................................................................................................................27
10.8. GET_G [0x24] ....................................................................................................................................................................................28
10.9. GET_DC [0x25 ] ................................................................................................................................................................................28
10.10. GET_CALIBRATION_INFO [0x50 ] .....................................................................................................................................................28
11. Miscellaneous commands.......................................................................................................................................... 9
11.1. ET_OUTPUT [0x51] ..........................................................................................................................................................................29
11.2. GET_INPUT [0x52] ..............................................................................................................................................................................29
11.3. GET_TEMPERATURE [0x4A] .............................................................................................................................................................29
11.4. GET_TOFCO _VER ION [0x49] .......................................................................................................................................................29
11.5. GET_CHIP_INFORMATION [0x48] .....................................................................................................................................................29
11.6. GET_PROD_DATE [0x50] ..................................................................................................................................................................30
11.7. IDENTIFY [0x47] .................................................................................................................................................................................30
© 2019 E PRO Photonics Corporation
Characteristics subject to change without notice
2 / 39 Installation_and_Operation_Manual_TOF>cam_635-V0.21
www.espros.com