7 HUNT ENGINEERING HEP40E USER MANUAL
General Description of Interfaces
The main interface on the HEP40E is the Comports. They use the Comport connector
that is standard to all HUNT ENGINEERING boards. At least one must be connected to
a "master" board to allow booting of the modules.
There are two host comport interfaces implemented on an HEPC2E, which are identical
except for their reset direction. They offer a simple I/O based connection from the ISA
bus to the 'C4x Comport.
The next major interface with the "master" board is the set of TIM-40 control signals. This
set comprises of a Global Reset in and a Config signal. This Config signal is defined in the
TIM-40 Specification as a signal that is connected to all processors in the system, which
each processor drives as a default after reset. As Software is booted onto each processor, it
removes the drive from this signal. Thus the host or any other processor or hardware can
use this signal as an indication that the system has booted and is ready. It is suggested that
any 'dangerous' hardware uses this signal to disable its 'dangerous' portion until everything
has booted successfully and there is definitely some control in place. The HEP40E reset in
must be driven by a master board, and if the config line is used this must be connected
together on all boards.
The third interface is the JTAG port. This allows the JTAG ports of the 'C4xs to be
exercised by the relevant software tools. Interconnection between boards is made using a
simple one-to-one 14 way cable, which is the same as the XDS510 type cable, so the
HEP40E can also be a slave of an XDS510 type debug system.
The topology chosen for the HEP40E is described in detail later but to enable the user to
configure their own system topology there are also a number Comport Connectors. These
allow for connections to other 'C4xs either on this board or on other boards.
The "optional" J3 connector allowed for in the TIM-40 specification is not implemented
on the HEP40E. The pinout of all of the TIM-40 connectors can be found in the TIM-40
specification.
Care must be taken when connecting to any of the C40 signals available on the TIM-40
connectors.
In particular HUNT ENGINEERING have carried out many experiments and believes
that the Comport connections MUST be buffered in all circumstances. This process of
course reduces the performance in terms of speed but provides essential reliability.
The HEP40E uses the second generation HUNT ENGINEERING comport buffering
scheme, the advantages of which include reduced power consumption and higher
bandwidth. These are NOT compatible with the earlier scheme used by HUNT
ENGINEERING or with schemes used by other vendors.
Other signals known to be sensitive to "abuse" are the H1 and H3 clock signals. These are
not used on the HEP40E.
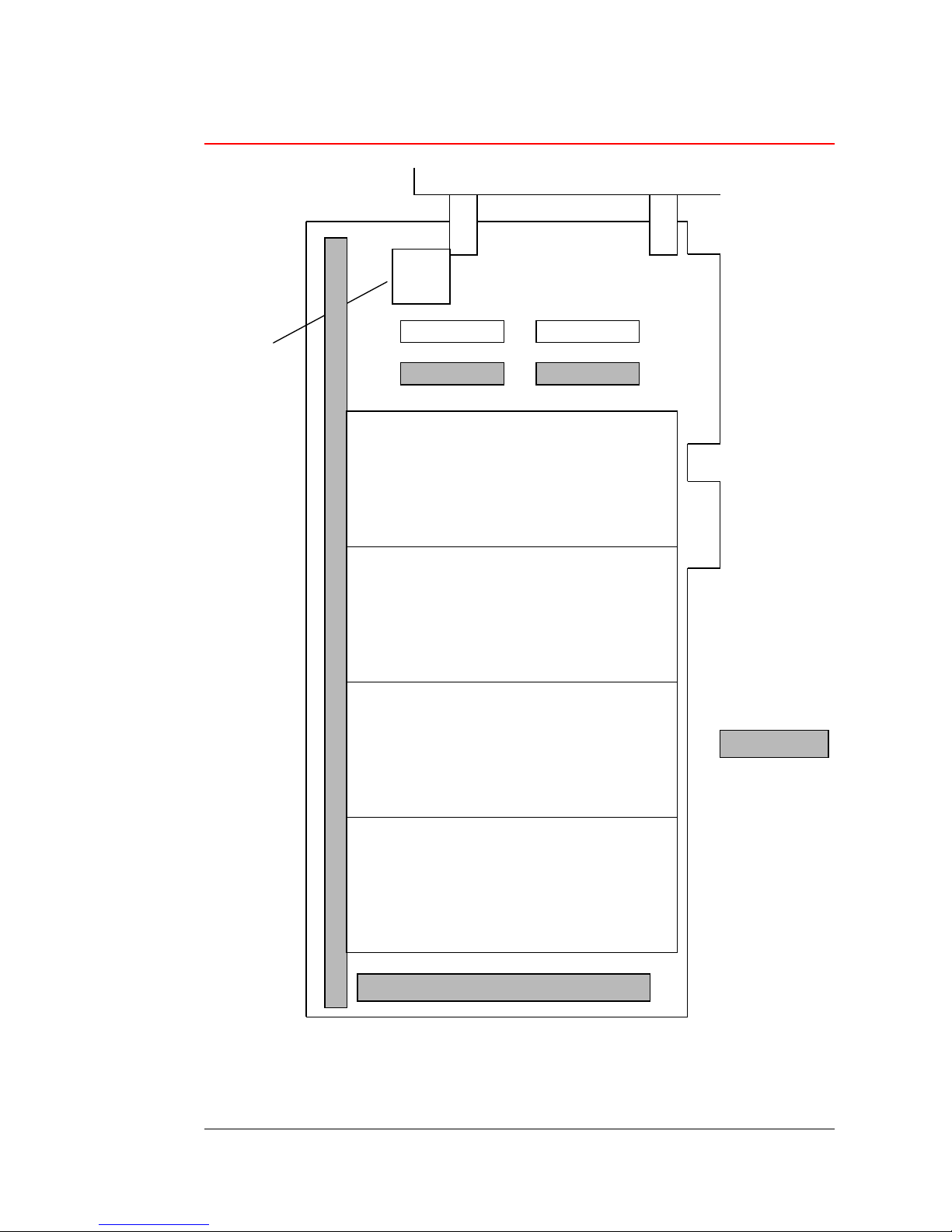
The HEP40E uses the TIM-40 connectors FX4C-80S-1.27DSA which allows for no
components on the Motherboard, in the area under a module as defined in Table 3 in the
TIM-40 specification.
The height of components on the underside of the module, that can be tolerated by this
motherboard, are defined by the module connectors as defined in table 2 of the TIM-40