Contents Page
Contents ....................................................3
Safety Notes..................................................4
Important Notes ...............................................5
Manufacturer Declaration ........................................6
Contents
Servomotors DBL/DBK 3
Seidel 07/2002 Contents
I General
I.1 About this manual ...................................................................................7
I.2 Prescribed usage ...................................................................................7
I.3 Design of the motors.................................................................................8
I.4 General technical data ...............................................................................8
I.5 Standard features ...................................................................................9
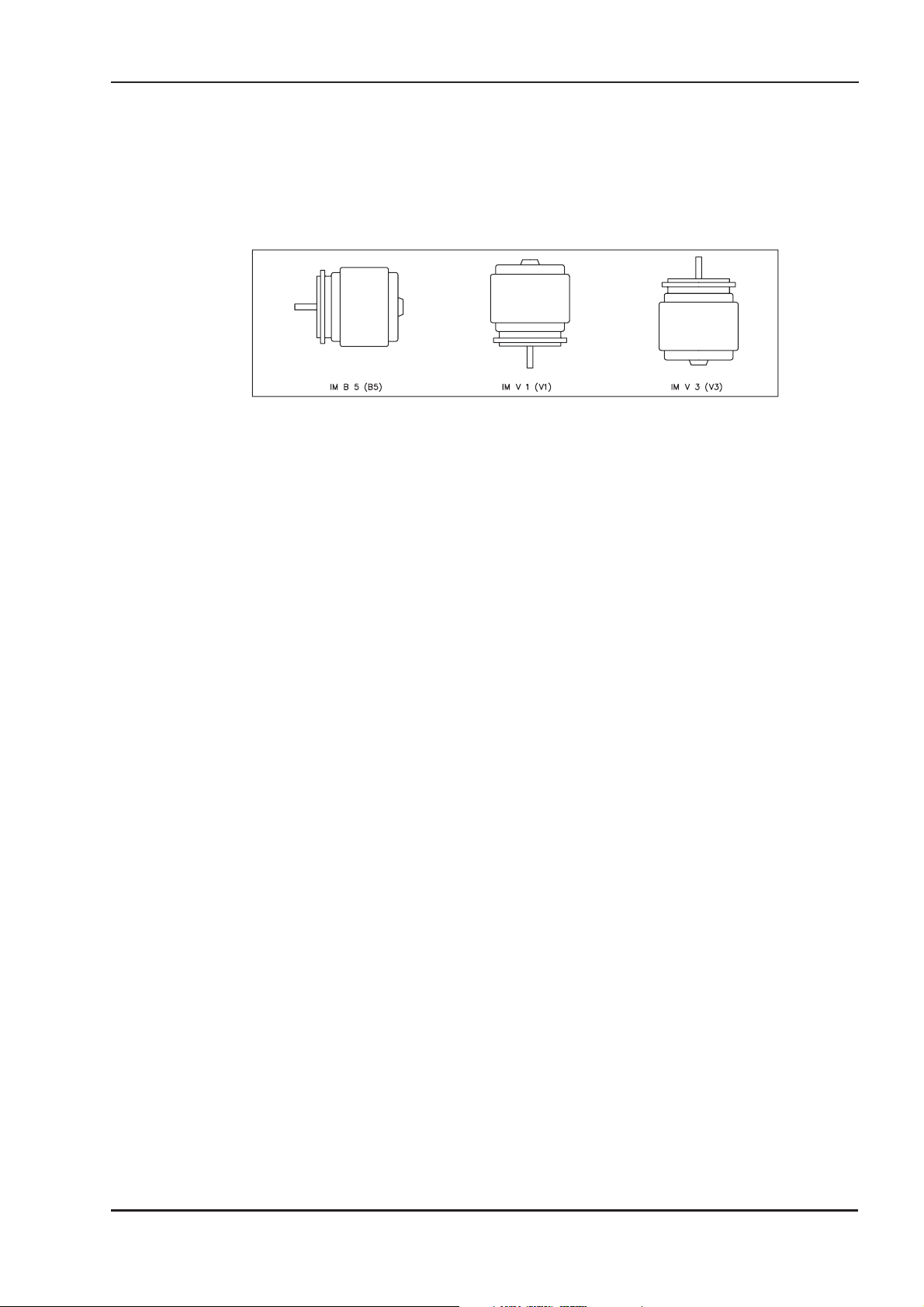
I.5.1 Style........................................................................................9
I.5.2 Shaft end, A-side ..............................................................................9
I.5.3 Flange ......................................................................................9
I.5.4 Protection class ...............................................................................9
I.5.5 Protective device ..............................................................................9
I.5.6 Insulation material class .......................................................................10
I.5.7 Vibration class ...............................................................................10
I.5.8 Connection method ...........................................................................10
I.5.9 Feedback unit ...............................................................................10
I.5.10 Holding brake ...............................................................................10
I.6 Options ..........................................................................................11
I.7 Selection criteria ...................................................................................11
I.7.1 Model number description ......................................................................12
I.7.2 Nameplate ..................................................................................12
II Installation / Setup
II.1 Important notes ....................................................................................13
II.2 Assembly / Wiring ..................................................................................14
II.2.1 Connection of the motors ......................................................................16
II.2.1.1 Wiring diagram for resolver motors ...........................................................17
II.2.1.2 Wiring diagram for encoder motors ...........................................................18
II.3 Setup............................................................................................19
III Technical data
III.1 Definitions ........................................................................................21
III.2 DBL1 ............................................................................................22
III.3 DBL2 ............................................................................................26
III.4 DBL3 ............................................................................................30
III.5 DBL4 ............................................................................................34
III.6 DBL5 ............................................................................................38
III.7 DBL6 ............................................................................................42
III.8 DBL7 ............................................................................................46
III.9 DBL8 ............................................................................................50
III.10 DBK4............................................................................................54
III.11 DBK5............................................................................................58
III.12 DBK6............................................................................................63
III.13 DBK7............................................................................................70
IV Appendix
IV.1 Delivery package, transport, storage, maintenance, disposal ................................................73
IV.2 Removing faults ...................................................................................74
IV.3 Index ............................................................................................75