If there is an active runway set and available, the flight mode on the
upper left of the OSD screen will change to "LND 1"and the first stage of
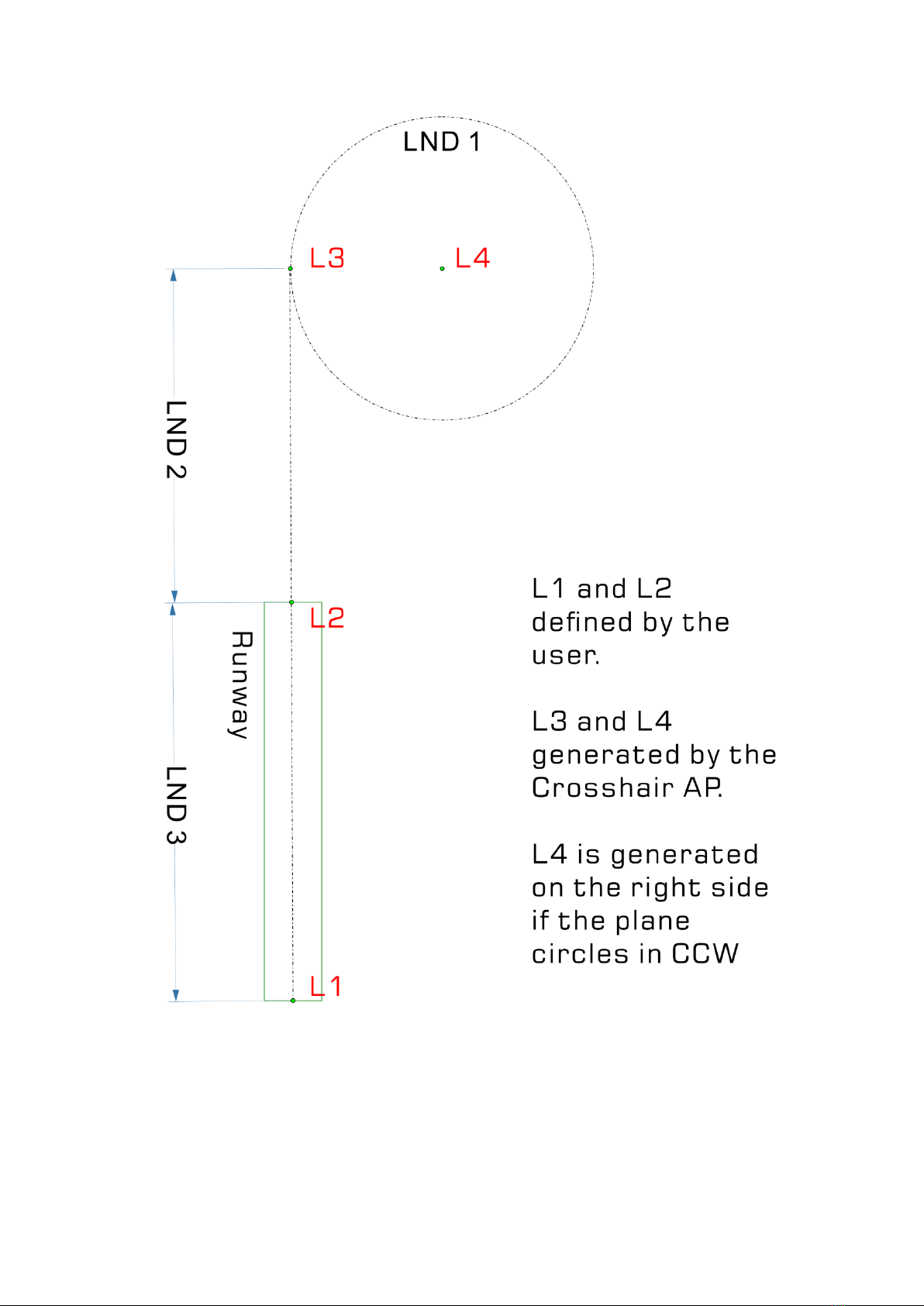
the landing procedure will be executed. The plane will fly towardL4 .
When the distance from theL4 is close to the standard circle
radius(defined by [AUTOPILOT SETTINGS->CIRCLE RADIUS]), the plane
will turn right, flying into the tangent of the circle and begin to circle
aroundL4 .The plane will climb/descend to L3 altitude at the highest
rate.
AsL3lays on the circle, the plane will fly closer to L3 with every circle.
Ideally the plane should align to the runway when it reaches L3.
If the altitude and distance are close enough to L3(<10m), the plane will
enter the second stage of landing, LND 2.
Here, the plane gradually descends along the L3-L2line, and flies
towardL2at the speed defined by [AUTO LANDING->LANDING
SPEED] . Once it reachesL2, the plane enters LND 3 stage.
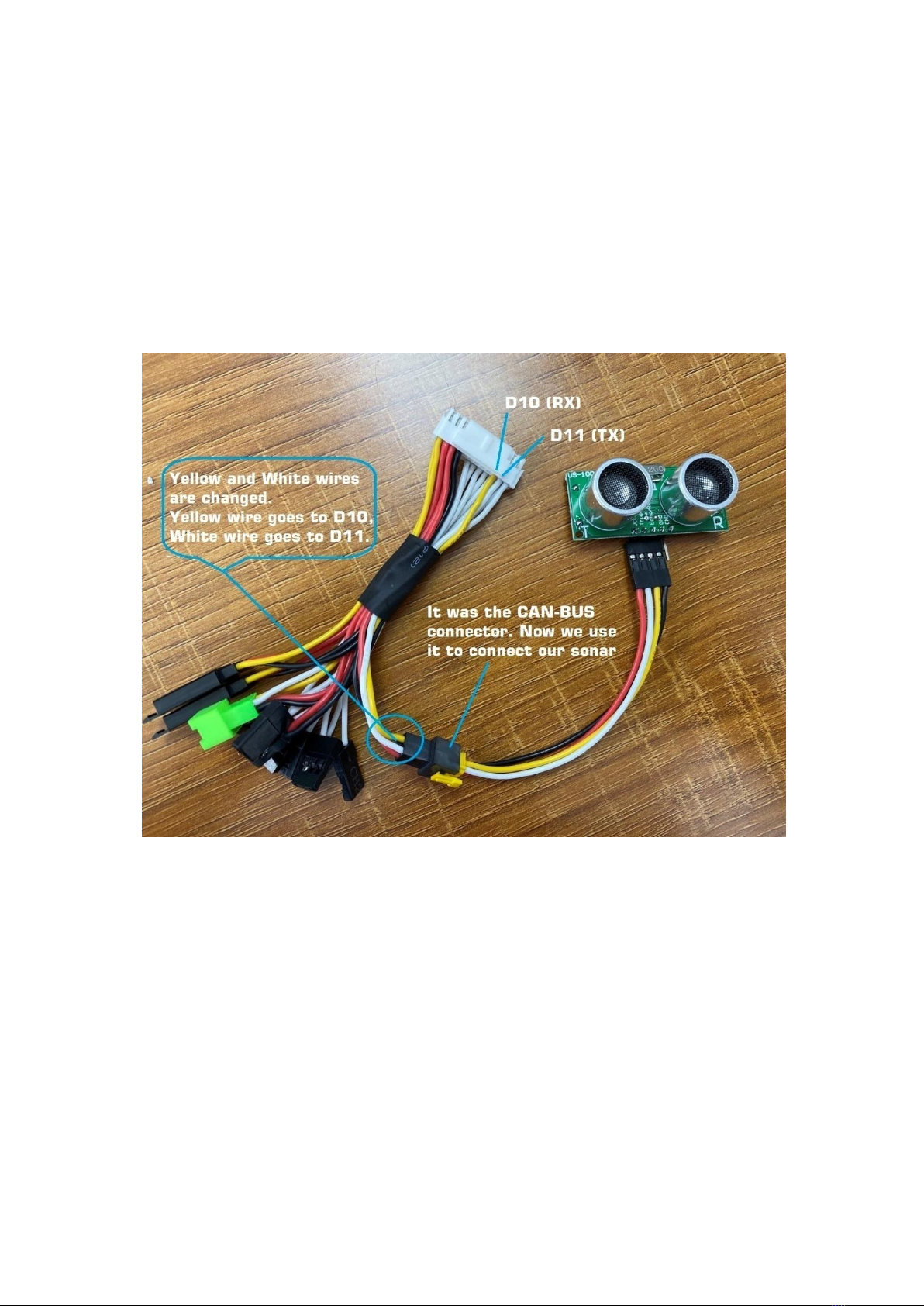
It begins to monitor the altitude using the sonar, and flies toL1 to touch
down. Once the sonar altitude is less than the throttle cut altitude (can
be defined by [AUTO LANDING-> THR CUT ALT]), the AP enters LND
4 stage to turn off the motors and prepare for touchdown.
LND 5 stage is only used if the brake function of the AP is set active by
[AUTO LANDING- BRAK ALT]. The plane will enter LND 5 stage to brake