MFD AP support PPM sum signal input, if you r receiver can output
PPM, then the connection is piece of cake, and using one servo wire will
provide all the signals to the MFD AP.
A) For Futaba serial receiver, PPM channel orders for channel 1-4 are AIL,
ELE, THR, and RUD. Use the jumper comes with the MFD AP,
connected to CH6, and then PPM signal to CH5.
B) For JR serial receiver, PPM channel orders for channel 1-4 are AIL, ELE,
THR, and RUD. Use the jumper comes with the MFD AP, connected to
CH5, and then PPM signal to CH6.
3 MFD AP will auto select the PPM order base on the jumper position。
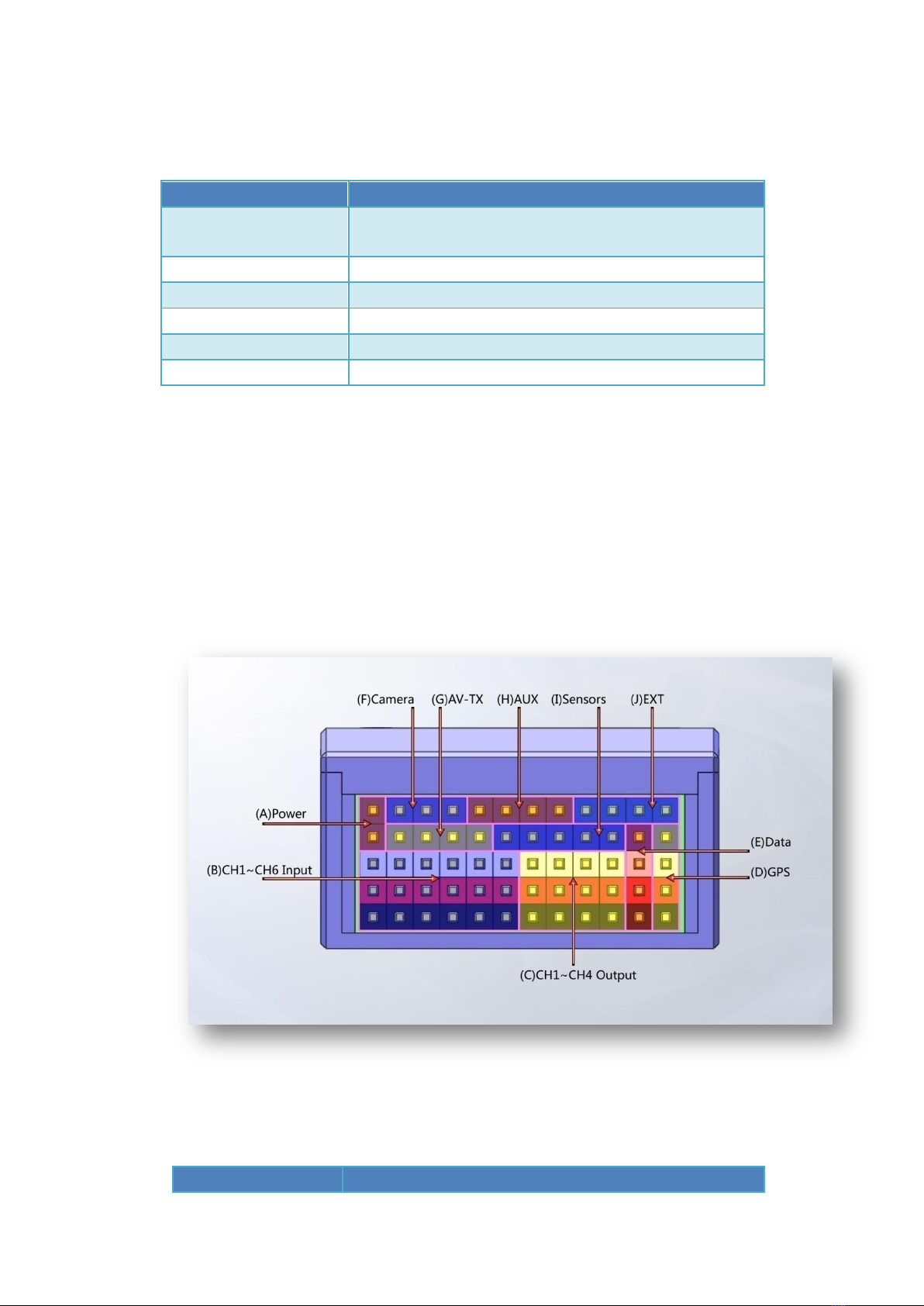
C) CH1~CH4 Output
D) This port used for servo connections, use for control your airplane.
White color pin is signal pin, red is power positive, and black is the
ground. The red pins are internal connected to the receiver input
CH1-CH6.
CH1~CH4 output functions