Operating principles..............................................................................................................................30
Strapdown navigator..........................................................................................................................30
Extended Kalman filter ......................................................................................................................31
Use with survey hardware.....................................................................................................................32
Data logging ......................................................................................................................................32
PPS and NMEA.................................................................................................................................33
PPS/Triggers .....................................................................................................................................34
PTP....................................................................................................................................................35
Cable modification.............................................................................................................................36
Appendix ...............................................................................................................................................37
Wiring guide for standard interfaces .................................................................................................37
Appendix 2 ............................................................................................................................................38
Drawings............................................................................................................................................38
Revision history.....................................................................................................................................40
List of figures
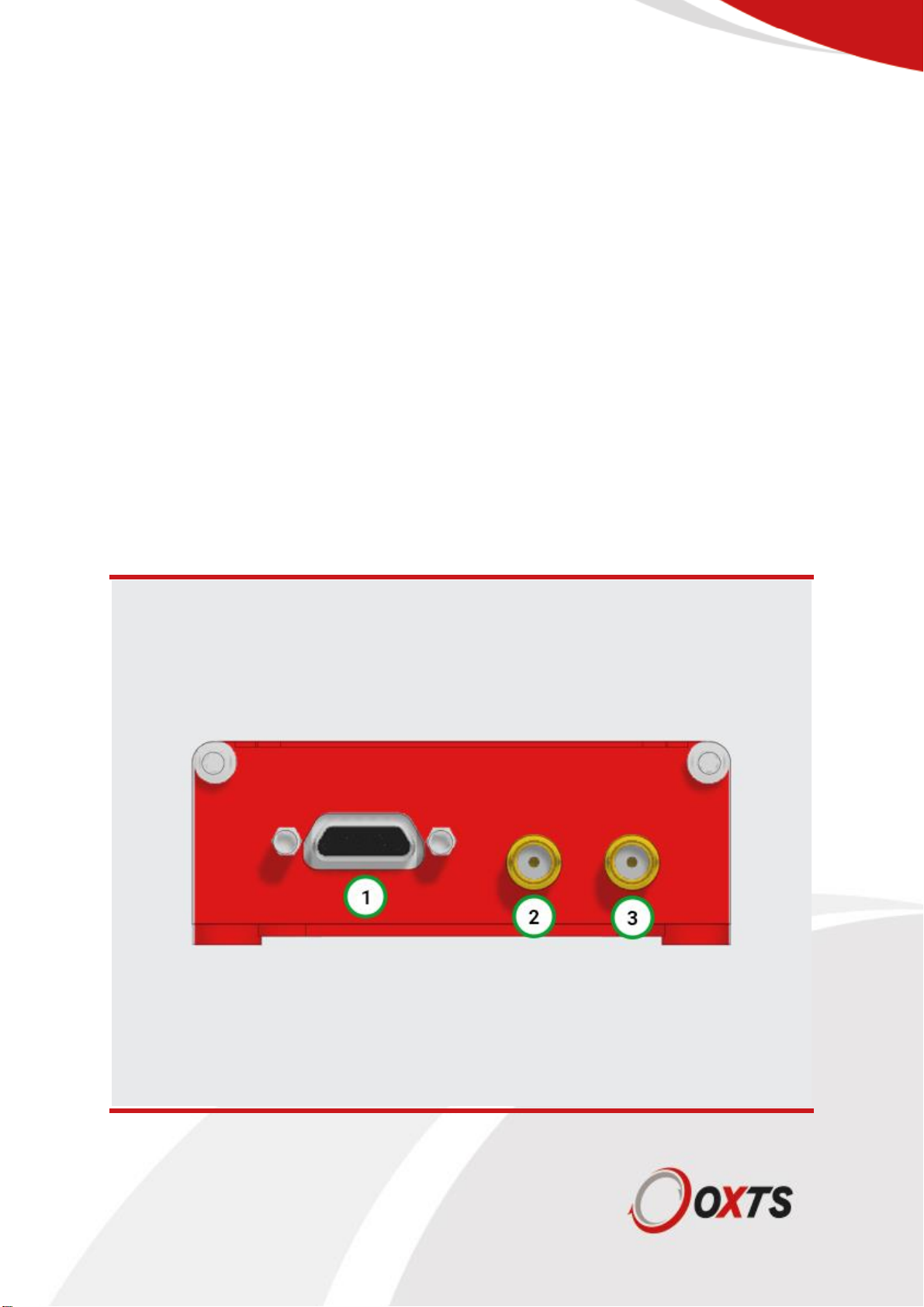
Figure 1: xNAV650 front view ...............................................................................................................10
Figure 2: xNAV650 top view..................................................................................................................11
Figure 3: xNAV650 dimensions and measurement origin point (mm)..................................................13
Figure 4: xNAV650 coordinate frame axes...........................................................................................14
Figure 5: xNAV650 main connector pin layout......................................................................................15
Figure 6: PPS waveform.......................................................................................................................16
Figure 7: xNAV650 user cable..............................................................................................................17
Figure 8: xNAV650 mounting points (mm)............................................................................................20
Figure 9: Dual antenna orientations......................................................................................................22
Figure 10: Windows Firewall warning message....................................................................................29
Figure 11: Schematic of the strapdown navigator ................................................................................30
Figure 12: NAVconfig LiDAR Scanner tab............................................................................................33
Figure 13: The PPS/Triggers tab in NAVconfig. ...................................................................................34
List of tables
Table 1: Supplementary manuals ...........................................................................................................7
Table 2: xNAV650 scope of delivery.......................................................................................................8
Table 3: xNAV650 points of interest .....................................................................................................11
Table 4: Power LED..............................................................................................................................12
Table 5: Status LED..............................................................................................................................12
Table 6: GNSS LED..............................................................................................................................12
Table 7: Main connector pin description...............................................................................................15
Table 8: PPS electrical specifications...................................................................................................16
Table 9: Digital I/O electrical specifications ..........................................................................................17
Table 10: xNAV650 user cable pin description.....................................................................................18
Table 11: xNAV650 performance specifications...................................................................................24
Table 12: xNAV650 inertial sensor specifications.................................................................................24
Table 13: xNAV650 physical characteristics.........................................................................................25