ST200 Evaluation System User Manual
Features
•Supports Doppler, FMCW, FSK, Monopulse
•USB Interface to Host Computer
•Onboard Low Noise ower Supplies
•Connectors for Different Radar Devices
•Amplifiers for Native Doppler Transceivers
•High erformance 16Bit Data rocessing
•250kSamples/s ADC and DAC
•Compact and Rugged Construction
•owerful Signal Explorer C Software
•NI LabVIEW ® DAQmx USB Interface
Applications
-Evaluation of Advanced Shortrange Radar Applications
-Development of Own Data rocessing Algorithms
-Signal Analysis and Logging
-Learning and Exploring Radar Basics
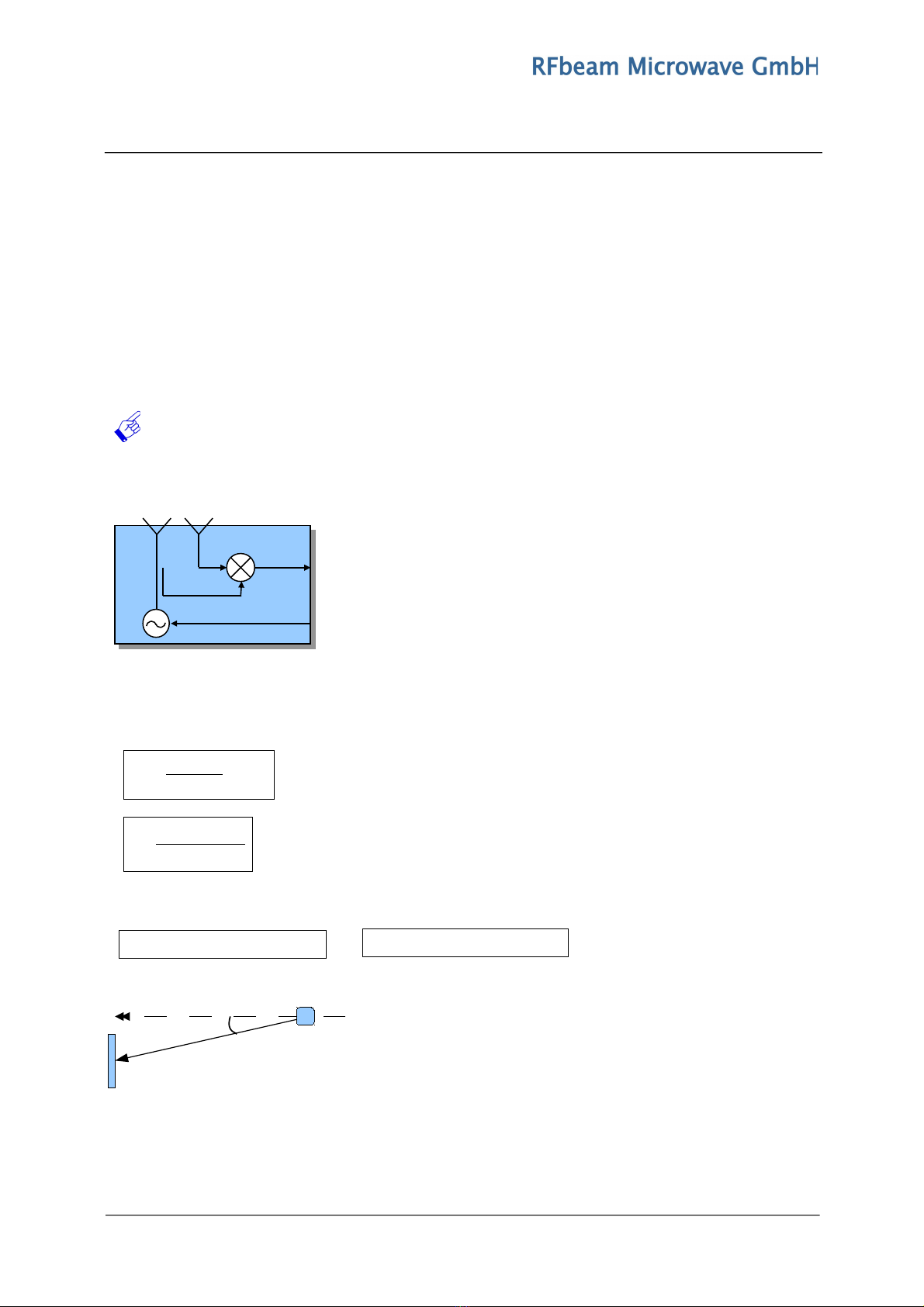
Description
ST200 is a 16Bit data acquisition and processing system with a total 250k/s sampling rate. It contains
all hardware necessary for acquiring Radar signals of RFbeam Transceivers.
ST200 contains a motherboard with power supply, amplifiers and I/O connectors. Data acquisition is
performed by a NI-USB-6211 16Bit multifunction DAQ module from National Instruments mounted on
the backside.
The easy to handle RFbeam Signal Explorer software features many basic Radar functions including
an exciting FSK (Frequency Shift Keying) operation mode for high resolution distance measurements
of moving objects.
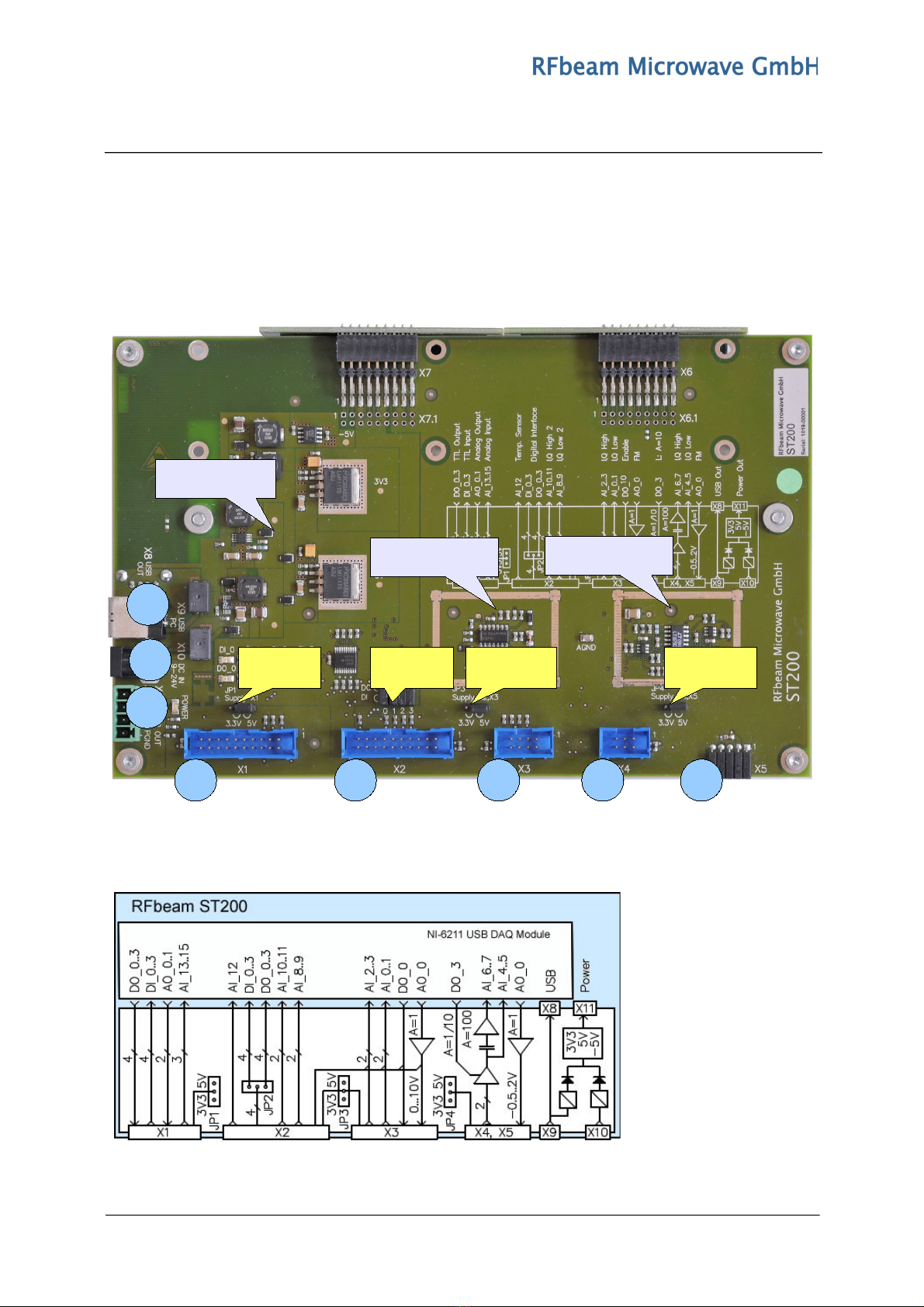
ST200 Block Diagram
Radar Connectors:
X1: General purpose I/O
X2: Mixed I/O
X3: 4 Channel An. Inputs
X4: 2 Channel An. Inputs
X5: 2 Channel An. Inputs
Computer Interface:
X9: USB C ort
ower:
X10: Optional DC In
X11: Low Noise DC Out
© RFbeam Microwave GmbH www.rfbeam.ch January, 2013 age 2/27