25 July 1996 23 mm Transponder Reference Manual
Page 3of 22
Contents
1. Introduction ................................................................................................................................... 4
2. Transponder Packaging ................................................................................................................. 5
3. Product Codes ............................................................................................................................... 5
4. Function ........................................................................................................................................ 5
4.1 Read (Reading of RO and R/W Transponders) ........................................................................ 5
4.2 Write and Program .................................................................................................................. 8
5. Characteristics of the Pulsed FM System ....................................................................................... 9
5.1 Basic System Data ................................................................................................................... 9
5.2 Reader and System Design Impact .......................................................................................... 10
5.3 System Performance and Functional Reliability Impact ........................................................... 10
5.4 Other Quality Factors of the TIRIS Pulsed FM System ............................................................ 10
6. EMI/EMC Performance ................................................................................................................. 11
6.1 General ................................................................................................................................... 11
6.2 The Automotive Environment and Factors .............................................................................. 11
6.3 TIRIS Pulsed FM Transponder and System Performance ......................................................... 11
7. Measurement Set-Ups .................................................................................................................... 14
7.1 Measurement set-up: Resonance frequency, bandwidth, quality factor ..................................... 14
7.2 Measurement Set-Up: Powering Field Strength ....................................................................... 15
7.3 Measurement set-up: Transponder Signal Strength ................................................................. 17
8. Absolute Maximum Ratings .......................................................................................................... 18
9. Recommended Operating Conditions ............................................................................................. 18
10. Characteristics ............................................................................................................................. 19
11. Environmental Data and Reliability ............................................................................................. 20
12. Memory ....................................................................................................................................... 20
13. Package ....................................................................................................................................... 20
14. Packing Symbolization ................................................................................................................ 21
Appendix A: Conversion Formula ...................................................................................................... 22
Figures
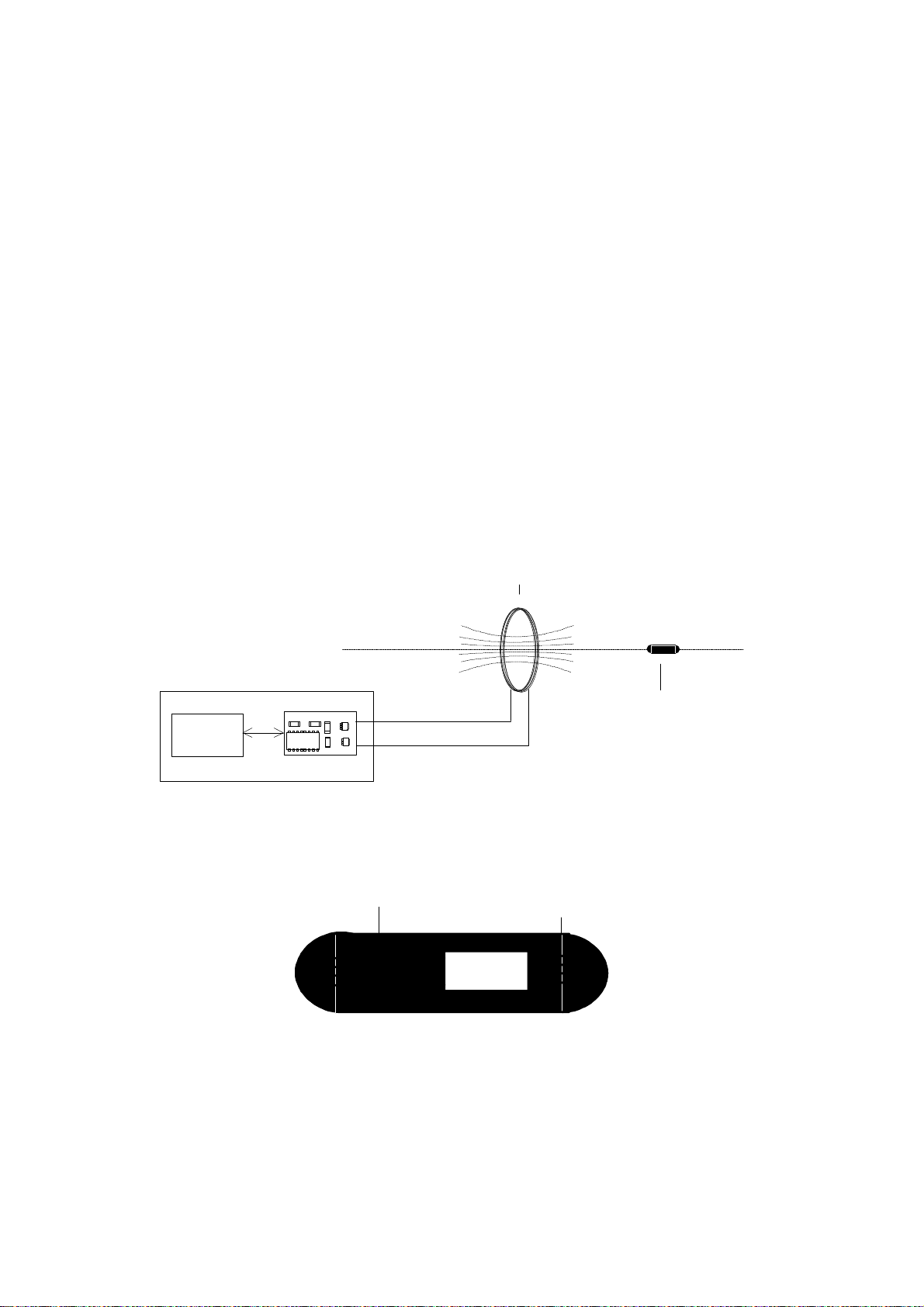
Figure 1: System Configuration Showing the Reader, Antenna and Transponder ................................ 4
Figure 2: Block Diagram of the TIRIS Pulsed FM Transponder .......................................................... 4
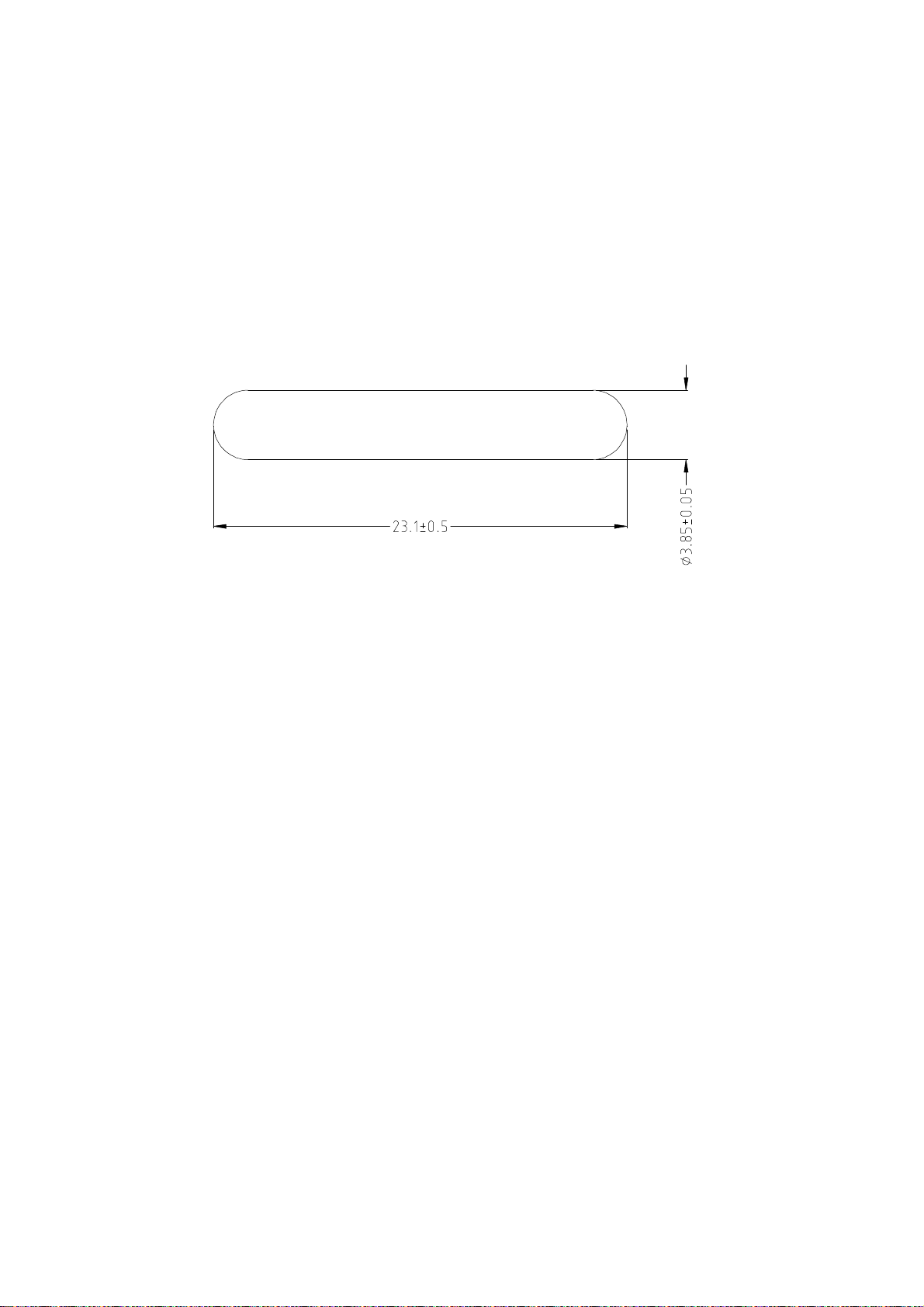
Figure 3: Dimensions of the TIRIS 23 mm Transponder (in mm) ....................................................... 5
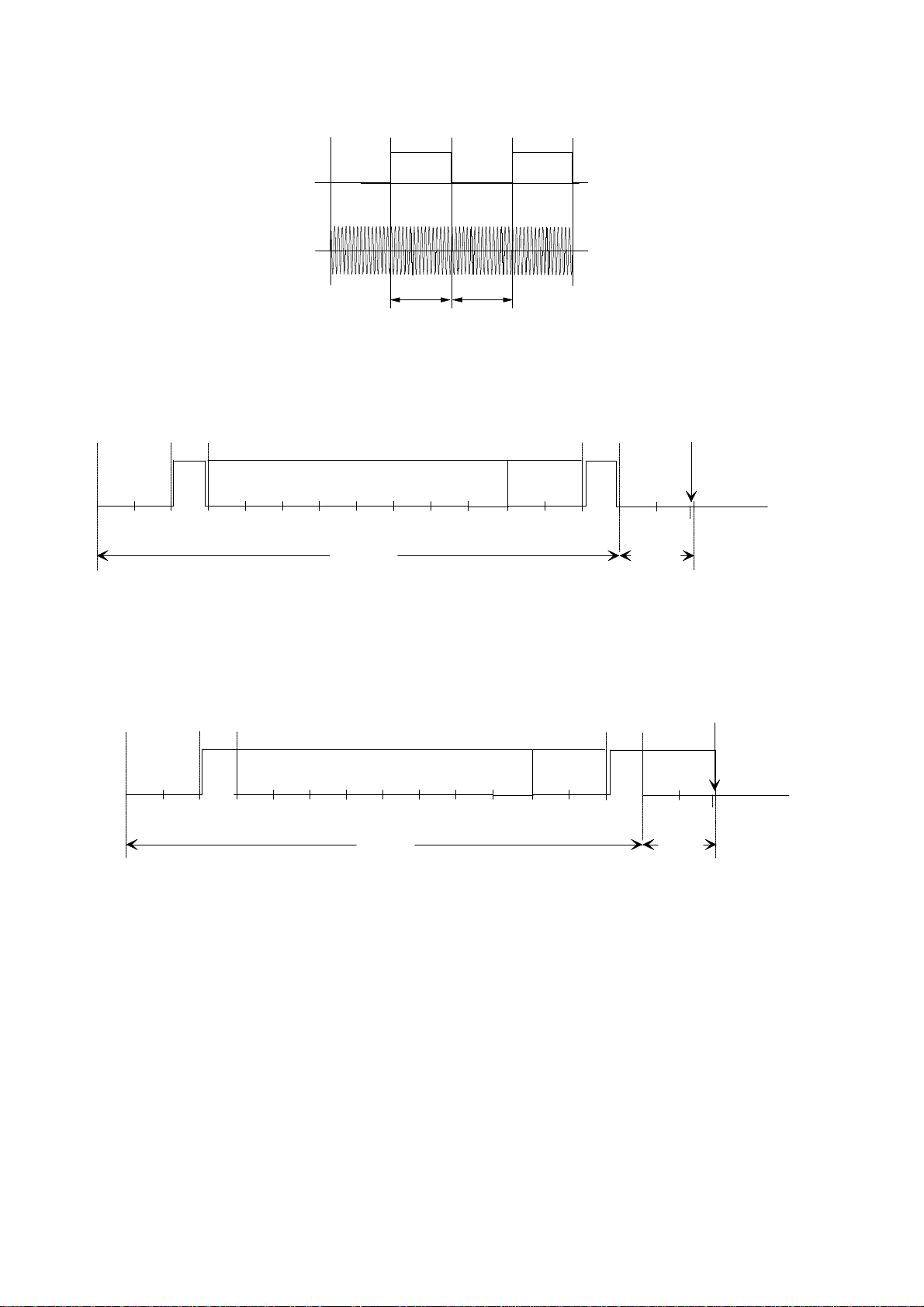
Figure 4: Charge and Read Function of the Transponder .................................................................... 6
Figure 5: FM Principle Used for the Read Function of TIRIS Transponders ........................................ 7
Figure 6a: Read Data Format of TIRIS RO Transponder ..................................................................... 7
Figure 6b: Read Data Format of TIRIS R/W Transponder ................................................................... 7
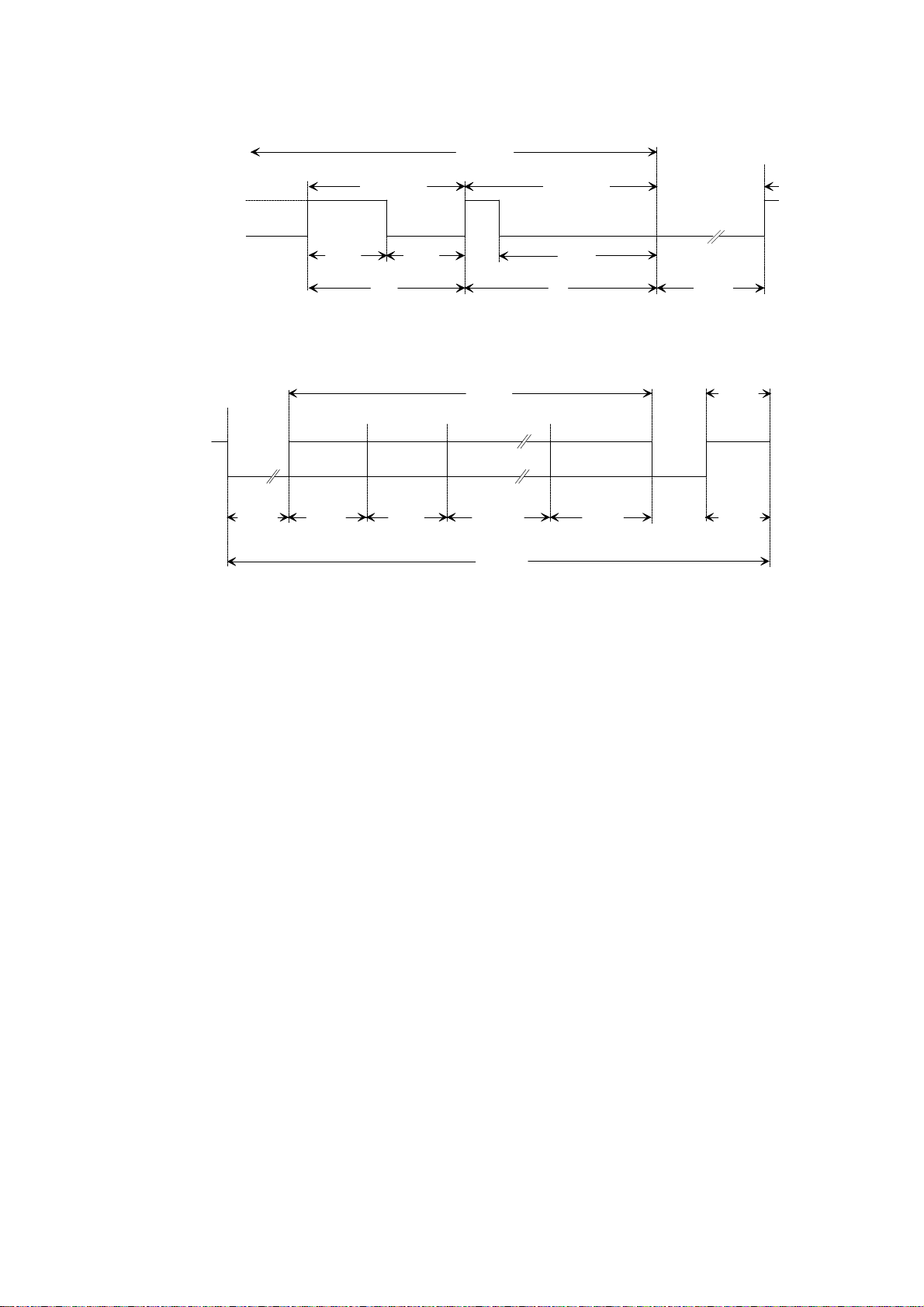
Figure 7: Charge, Write and Program Principle used for TIRIS .......................................................... 8
Figure 8: The Write and Program Function ........................................................................................ 9
Figure 9: Write Data Format for Programming Function .................................................................... 9
Figure 10: EMI Performance Test of the TIRIS System. ..................................................................... 12
Figure 11: EMI performance in automotive environment. ................................................................... 13
Figure 12: Reading range under broad band noise (white noise) conditions ........................................ 13
Figure 13: Measurement for transponder resonance, bandwidth & quality factor ............................... 14
Figure 14: Determination of resonance and -3dB by monitoring pick-up coil voltage .......................... 15
Figure 15: Test set-up for powering field strength determination ........................................................ 15
Figure 16: Received signal at the pick up coil, if power field strength is sufficient .............................. 16
Figure 17: Determination of the transponder signal strength with Helmholtz aperture ........................ 17
Figure 18: Monitored signal voltage at the spectrum analyzer (time domain mode) ............................ 17