5.9. Checking Firmware Revision...........................................................26
1.1. tarting the Unit Logging.................................................................28
6. Other Functions.......................................................................................29
6.1. View Options....................................................................................29
6.1.1. Clearing the Log......................................................................29
6.1.2. Displaying the Time/Date of events.........................................29
6.1.3. Displaying Log Events.............................................................29
6.2. Reading ettings from TB 12.........................................................29
6.2.1. Displaying the Battery Voltage................................................29
6.2.2. Viewing the Device ID.............................................................30
6.2.3. Viewing the Firmware Version.................................................30
6.2.4. Reading the Date-Time...........................................................30
6.2.5. Reading the LoRa ettings.....................................................30
6.2.6. Reading the ensor ettings..................................................30
6.2.7. Reading the chedule ettings...............................................30
7. TB 12 Data format..................................................................................31
7.1. Battery data format..........................................................................31
7.2. ensor data format..........................................................................31
7.2.1. TB 12 , TB 12B, TB 12 M.................................................31
7.2.2. TB 12PC-F Pulse Count Mode............................................32
7.2.3. TB 12PC-F Flow witch Mode............................................33
8. Backend etup........................................................................................34
8.1. Configuration Requirements............................................................36
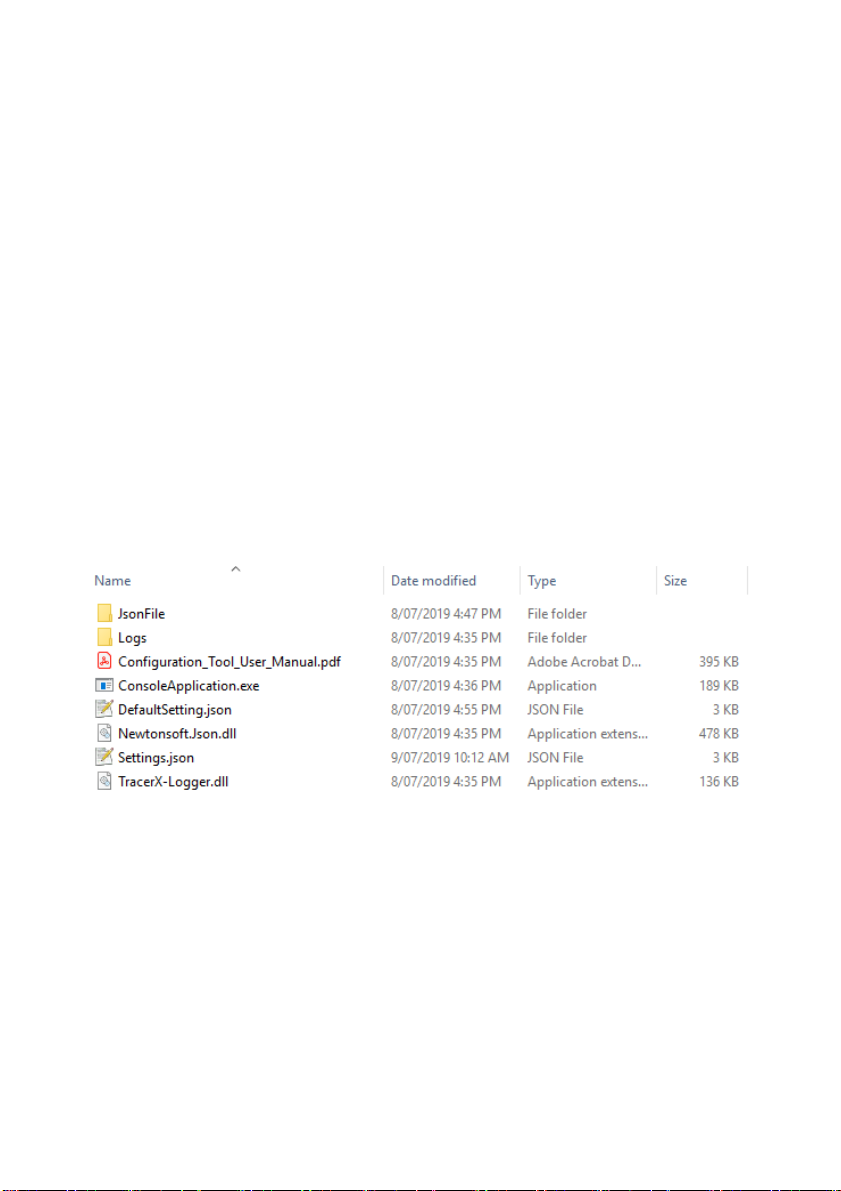
9. TB 12 Console Log Files........................................................................38
10. TB 12 Firmware Upgrade.....................................................................39
10.1. Equipment Required......................................................................39
10.2. Preparation....................................................................................40
10.2.1. TB 12B, TB 12 , TB 12PC................................................40
10.2.2. TB 12PC/F .........................................................................41
10.3. Firmware Update...........................................................................41
11. Rising HF Modem Firmware Upgrade...................................................43
11.1. Preparation....................................................................................43
11.1.1. TB 12B & TB 12 ................................................................44
11.1.2. TB 12PC/F .........................................................................44
11.2. Upgrade Process...........................................................................45