WhentheOn-Line(yellow)lightisnotlit,theVXMisintheLocal/Jogmode.Usingthe
frontpaneljogbuttons,eachmotorcanbejoggedasinglesteporslewedto2000sps(5
revs/sec.)ineitherdirection.
WhenaJogbuttonispressedthemotormoves1step(1/400rev.)Ifthebuttonisheld
for>0.3secondthemotorwillaccelerateto2000sps.PressingStopwhileusingthe
Jogbuttonswillholdthespeedat39sps.
Refertothe“setj”and“setJ”commandsinAppendixHformoreinformationabout
settingjogspeedstodifferentvalues.
7
Setup
Jog Mode
Optional Joysticks
TherearetwotypesofexternaljoysticksavailablefortheVXM.Oneisdigitalthat
functionslikethefrontpaneljogbuttons,andthesecondisananalogproportionalspeed
typethatcanoperateupto4motorswith2VXMsFormoreinformation/configuration
refertoAppendixHandJ.
1. Connectthecablestomotorsandlimitswitches(ifactuatorhaslimitswitches.)
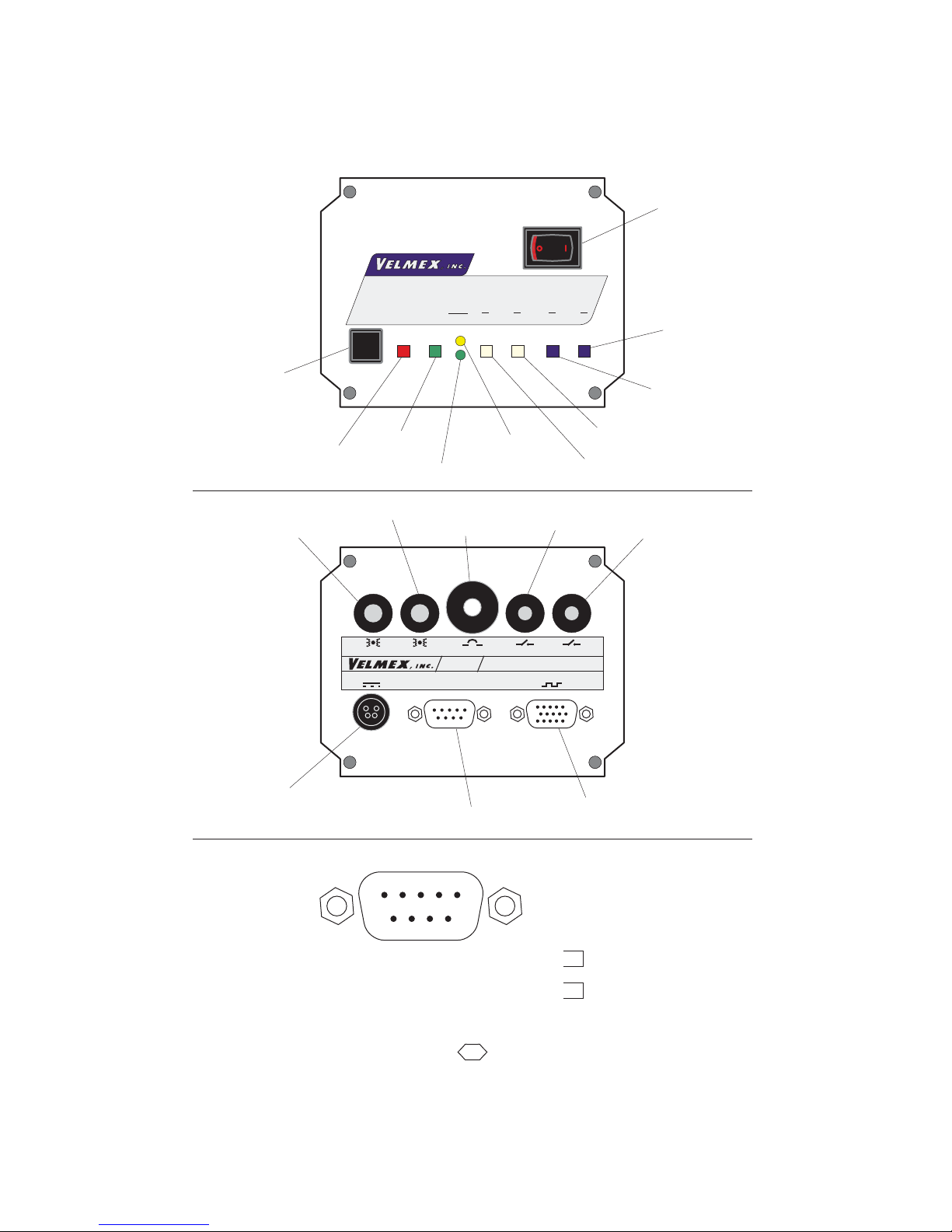
Connectthe9pinserialcablefromtheVXM’srearpanelconnectorlabeled"RS-232"and
yourcomputer'sserialport(usuallylabeled“COM”or“|O|O|”.)Forcomputerswithonly
USBports,useaUSBtoRS-232adapter.
Motorcablesshould neverbebundledtogetherwiththeLimitSwitch,orany
I/Ocabling. putanyoftheVXM'scableswithpowercablesinacommonelectrical
keepLimit SwitchandI/Ocablesatleast2inchesfromMotorconduitorducting.
andPowercables.
CAUTION:Motorcablelengthorconnectorsshouldnotbealteredwithoutconsulting
Velmexfirst.ImproperwiringcanresultinpoorperformanceanddamagetotheVXM.
Alteredcablesandresultantdamageisnotcoveredbythewarranty.
IMPORTANT:TheVXMcanautomaticallydetectlimitswitchinputsthatarewired
normallyclosedtooperate(motorstopsonopencircuit.)Normallyclosedisthestandard
usedonallVelmexproducts.However,Velmexrotarytableswiththehomeswitchoption
requiresthatthelimitswitchinputsbereconfiguredinsetup.Refertothe“setL”
commandinAppendixN.
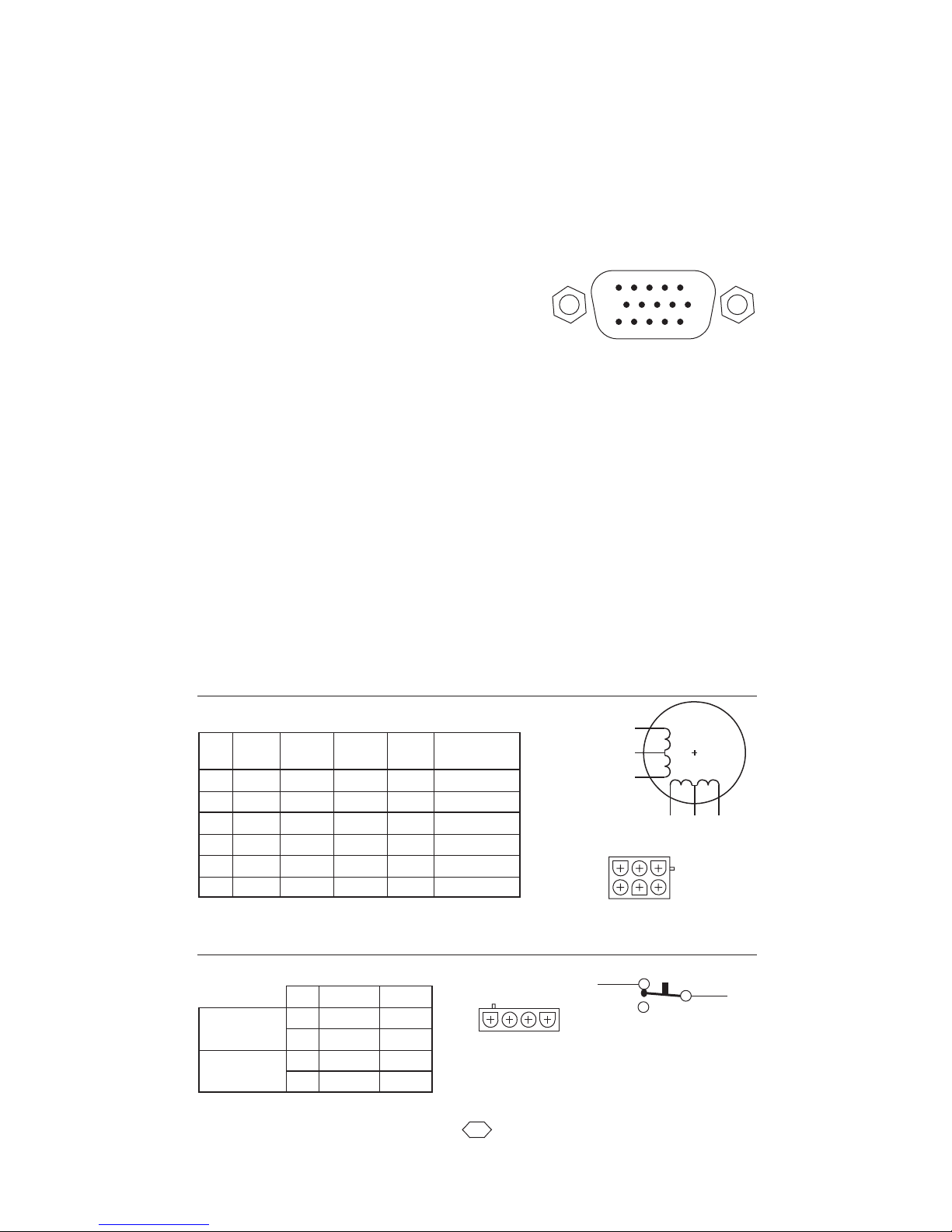
Neverconnectordisconnectmotorswiththepoweron,thiscanresultin
severedamagetomotordriveelectronics.
2. ConnectcablefromDCpowersupplytoVXM
3. PlugtheDCpowersupplyintoaACoutlet.
4. TurnontheVXMbypushingtherightsideoftherockerswitchlocatedonthefront
panel.
5. InitiallytheVXMissetfornomotorsselected(verylowpower,motorsbuzzbutwill
CAUTION:
Never
Always
CAUTION:
notmove.)Use the COSMOS software included on the CDROM to set VXM for the
proper motors.IfyourcomputerisnotaWindowsbasedsystem,refertothe“setM”
commandinthereferencesectionofthismanual.
BothOn-LineandPowerLEDswilllightfor1second,theOn-Linewillgoout,
thenthePowerLEDwillflash6times.