www.crosscontrol.com
Contents
1. Introduction................................................................................................................................2
Revision history ...............................................................................................................................2
2. Product models .........................................................................................................................4
2.2. Document conventions .......................................................................................................4
2.3. Identification .........................................................................................................................4
2.4. Environmental resistance .....................................................................................................5
3. Product overview.......................................................................................................................6
3.1. Front side view.......................................................................................................................6
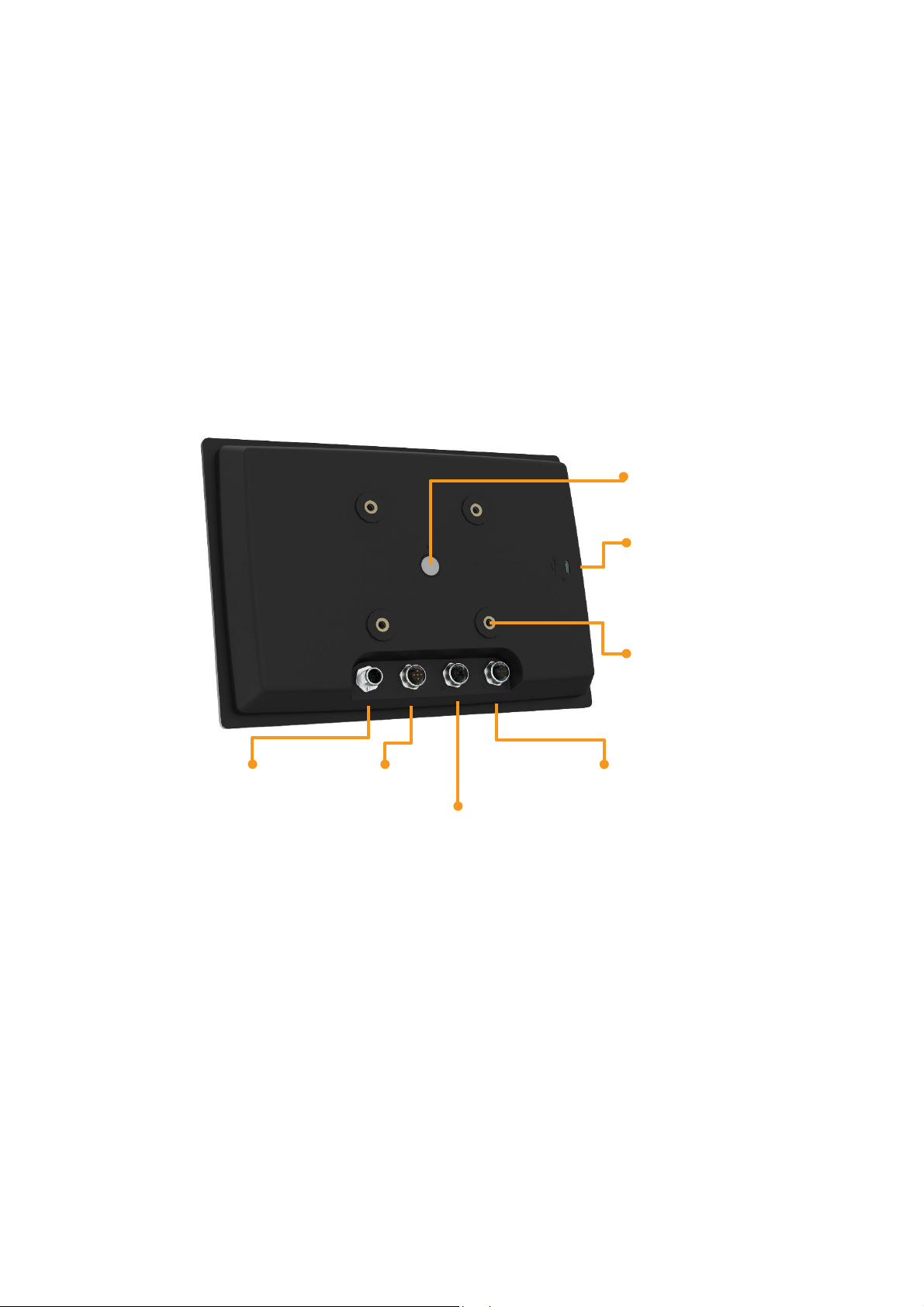
3.2. Rear side view .......................................................................................................................7
4. Mounting and handling ............................................................................................................8
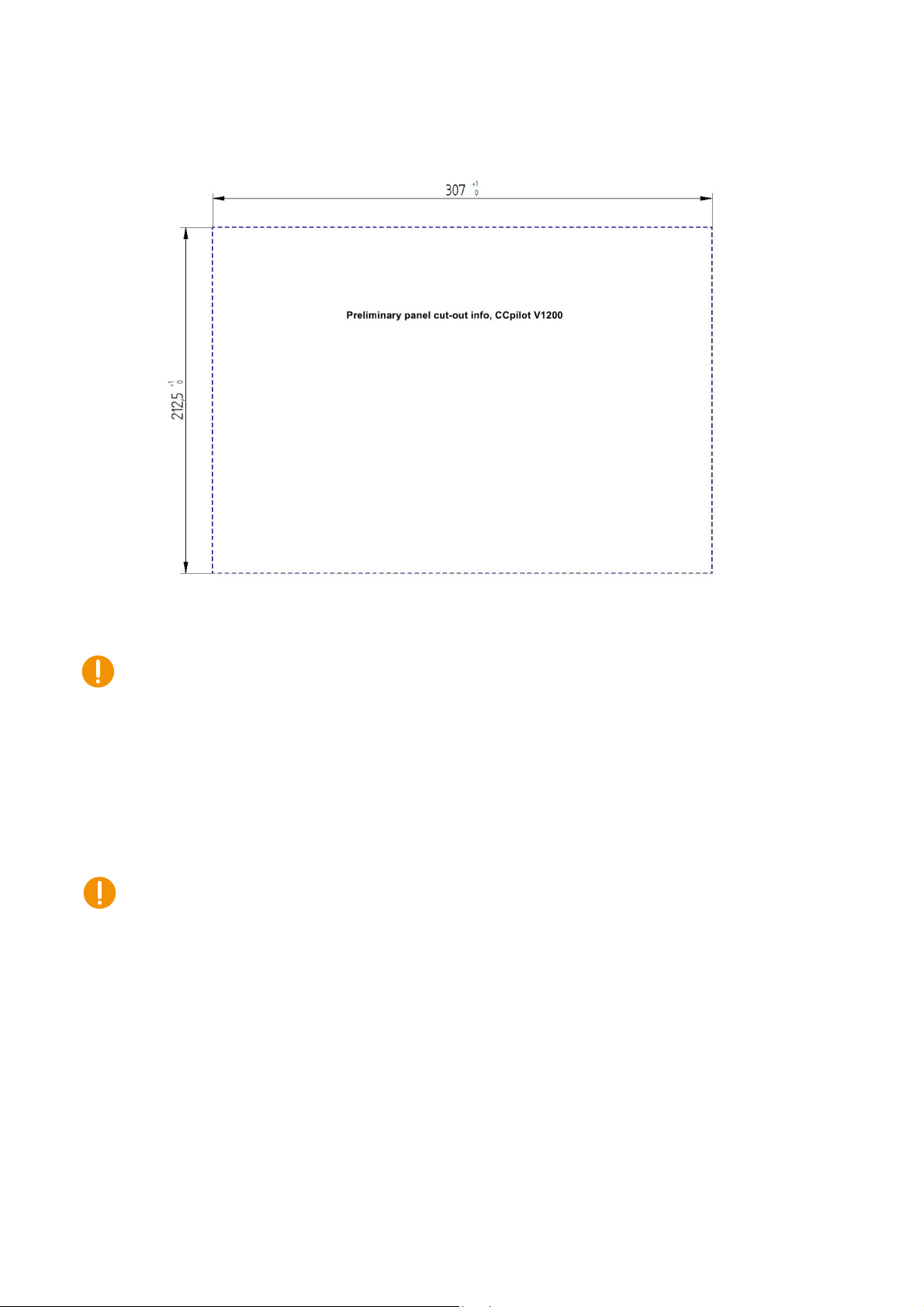
4.1. Mounting................................................................................................................................8
4.2. Connecting to power supply ............................................................................................10
4.3. Cable installation ................................................................................................................12
4.4. Special considerations .......................................................................................................13
4.5. Handling and maintenance..............................................................................................13
4.6. Transportation......................................................................................................................14
5. Basic operation........................................................................................................................15
5.1. Turning ON ...........................................................................................................................15
5.2. Turning OFF and suspending .............................................................................................15
5.3. Light sensor ..........................................................................................................................16
5.4. Using the touch screen ......................................................................................................17
5.5. Status notification ...............................................................................................................17
5.6. System related error codes................................................................................................17
5.7. Display related error codes ...............................................................................................18
6. Interface overview ..................................................................................................................20
6.1. Touch screen .......................................................................................................................20
6.2. Light sensor ..........................................................................................................................20
6.3. RGB status LED.....................................................................................................................20
6.4. Buzzer....................................................................................................................................20
6.5. CAN ......................................................................................................................................20
6.6. Ethernet................................................................................................................................21
6.7. USB ........................................................................................................................................21
6.8. Bluetooth and Wi-Fi.............................................................................................................21
7. Connectors ..............................................................................................................................22
7.1. M12 connectors ..................................................................................................................22
7.2. Connector 1 - Power and CAN M12 pinout ....................................................................23
7.3. Connector 2 - CAN M12 pinout ........................................................................................23
7.4. Connector 3 - Ethernet M12 pinout ..................................................................................24
7.5. Connector 4 - USB M12 connector pinout.......................................................................25
7.6. Connector 5 - USB-C...........................................................................................................26
8. Specifications ..........................................................................................................................26
8.1. Technical data....................................................................................................................26
8.2. Environmental specifications.............................................................................................29