Contents
Revision history ..................................................................................................................................3
1. Introduction ..................................................................................................................................4
1.1. Product models.......................................................................................................................... 4
1.2. Document conventions ........................................................................................................... 4
1.3. Identification............................................................................................................................... 5
1.4. Environmental resistance ......................................................................................................... 5
2. Product overview .........................................................................................................................5
2.1. Front side view............................................................................................................................ 5
2.2. Rear side view ............................................................................................................................ 6
3. Mounting and handling...............................................................................................................7
3.1. Mounting ..................................................................................................................................... 7
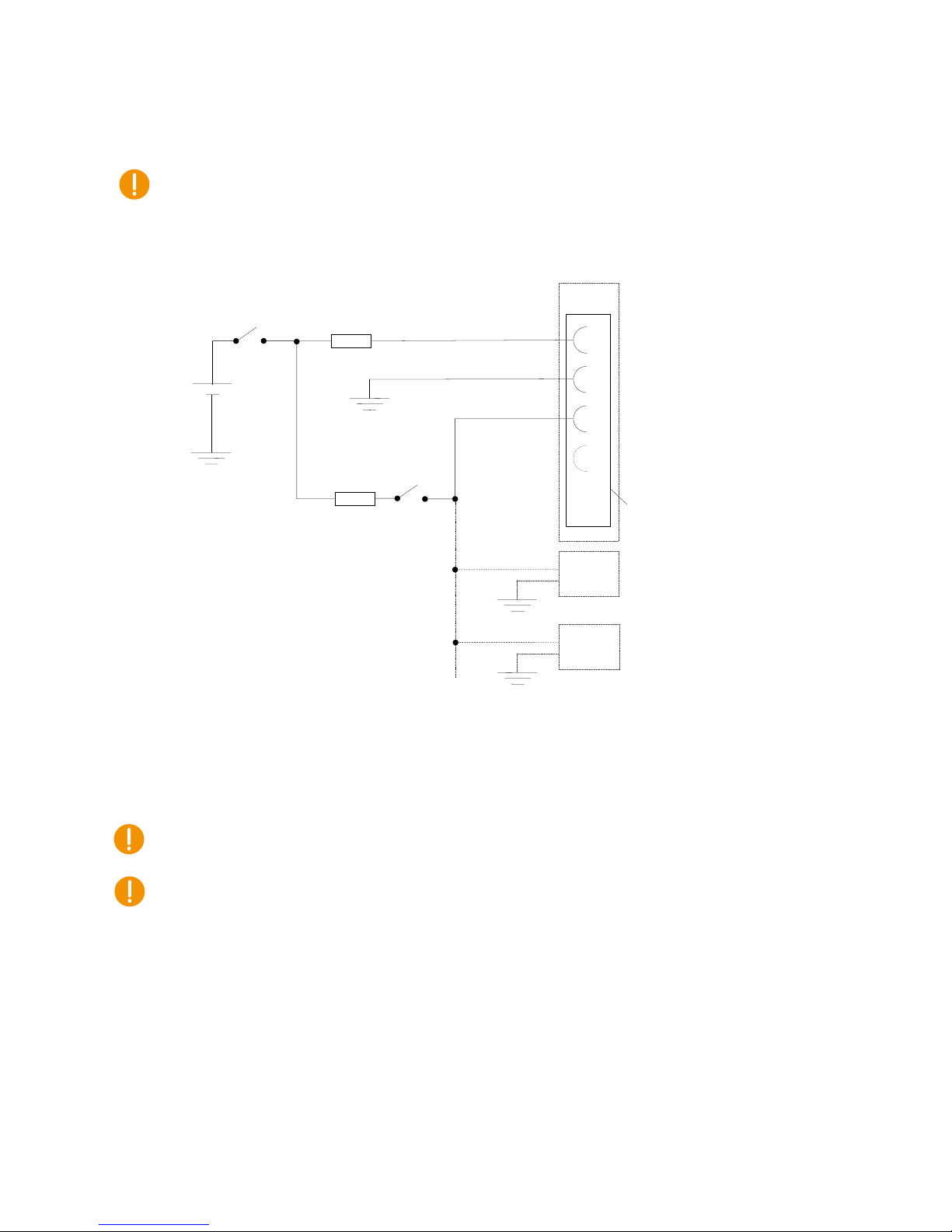
3.2. Connecting to power supply .................................................................................................. 9
3.3. Cable installation..................................................................................................................... 10
3.4. Special considerations............................................................................................................ 11
3.5. Handling and maintenance ................................................................................................. 12
3.6. Transportation........................................................................................................................... 13
4. Basic operation ..........................................................................................................................14
4.1. Turning ON ................................................................................................................................ 14
4.2. Turning OFF and suspending ................................................................................................. 14
4.3. Adjusting the screen brightness............................................................................................ 16
4.4. Status notification .................................................................................................................... 16
4.5. Error codes ................................................................................................................................ 17
5. Interface overview.....................................................................................................................18
5.1. Front panel................................................................................................................................ 18
5.2. Buzzer ......................................................................................................................................... 18
5.3. CAN............................................................................................................................................ 18
5.4. Ethernet ..................................................................................................................................... 18
5.5. USB .............................................................................................................................................. 19
5.6. Configurable inputs................................................................................................................. 19
5.7. Analog inputs ........................................................................................................................... 20
5.8. Low side outputs ...................................................................................................................... 20
5.9. Bluetooth ................................................................................................................................... 21
6. Connectors .................................................................................................................................22
6.1. Connector layout .................................................................................................................... 22
6.2. Deutsch DTM connectors, general ...................................................................................... 23
7. Specifications .............................................................................................................................24
7.1. Technical data......................................................................................................................... 24
7.2. Environmental specifications ................................................................................................ 27
7.3. EMC specification ................................................................................................................... 27
7.4. Weight and dimensions.......................................................................................................... 28
Technical support............................................................................................................................30
Trademarks and terms of use ........................................................................................................30
Index.................................................................................................................................................31