Sensing the world ·Leading the change
9
2.4
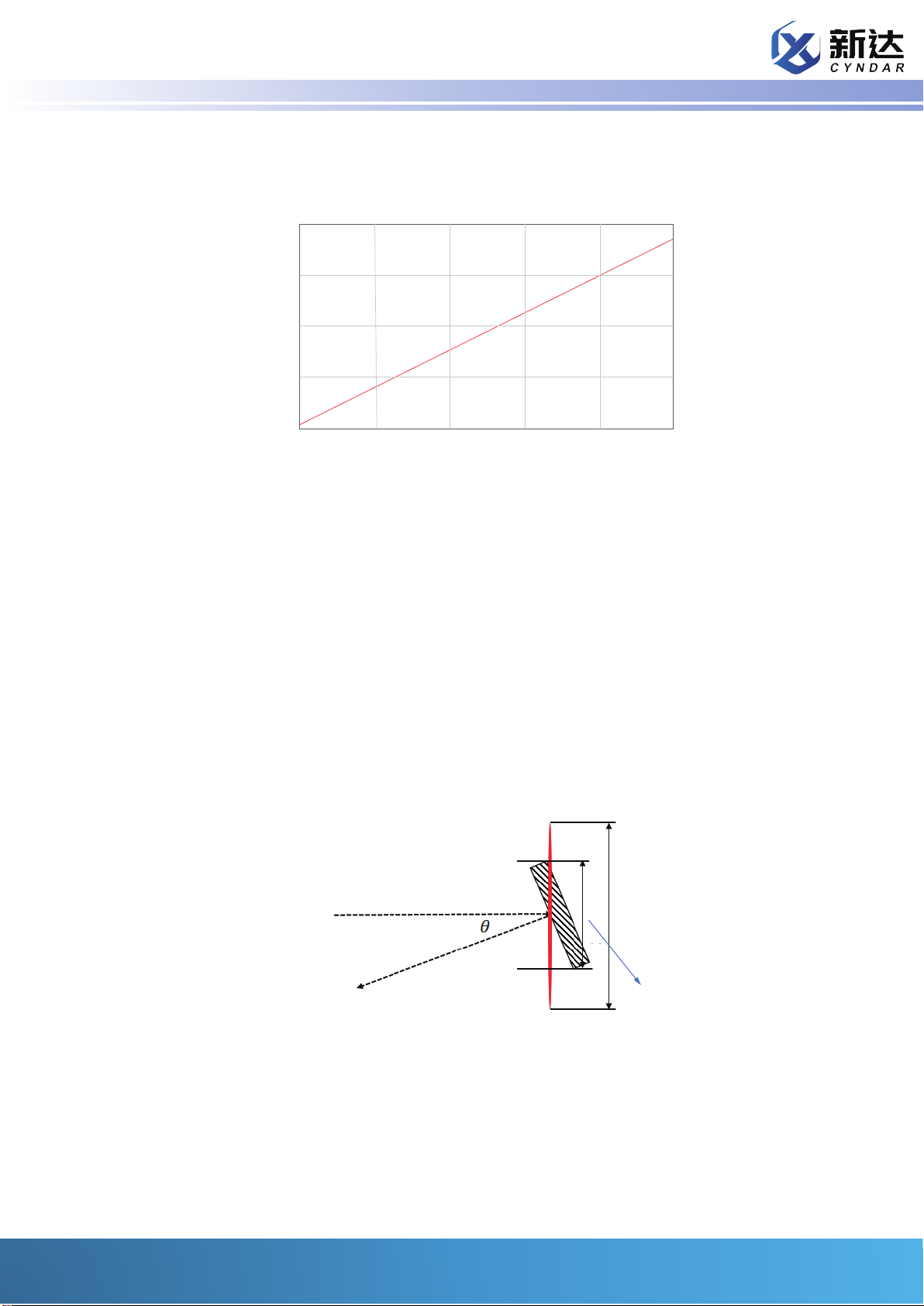
0.05-10m 10-15m 15-25m
20mm 20mm 35mm
15mm 20mm 30mm
Ranging error within different detection distances
1mm 1h
2mm 2h
3mm 3h No echo can be detected in this observation direction, and there is no
object that can be identified within the range.
4-50mm 4h-32h
50mm-500mm 32h—1F4h
500mm-
25000mm
1F4h—61A8
Ranging and scanning performance
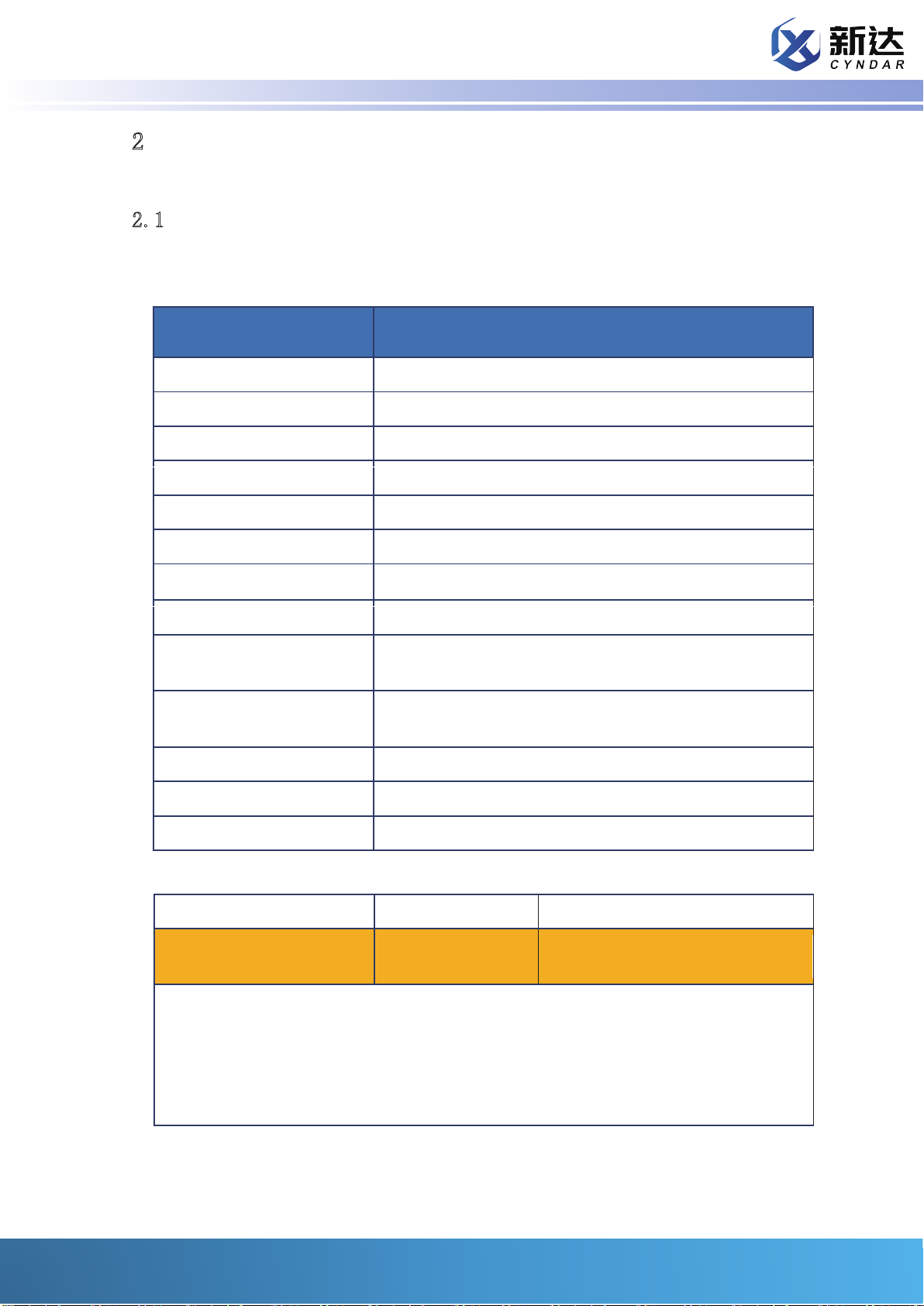
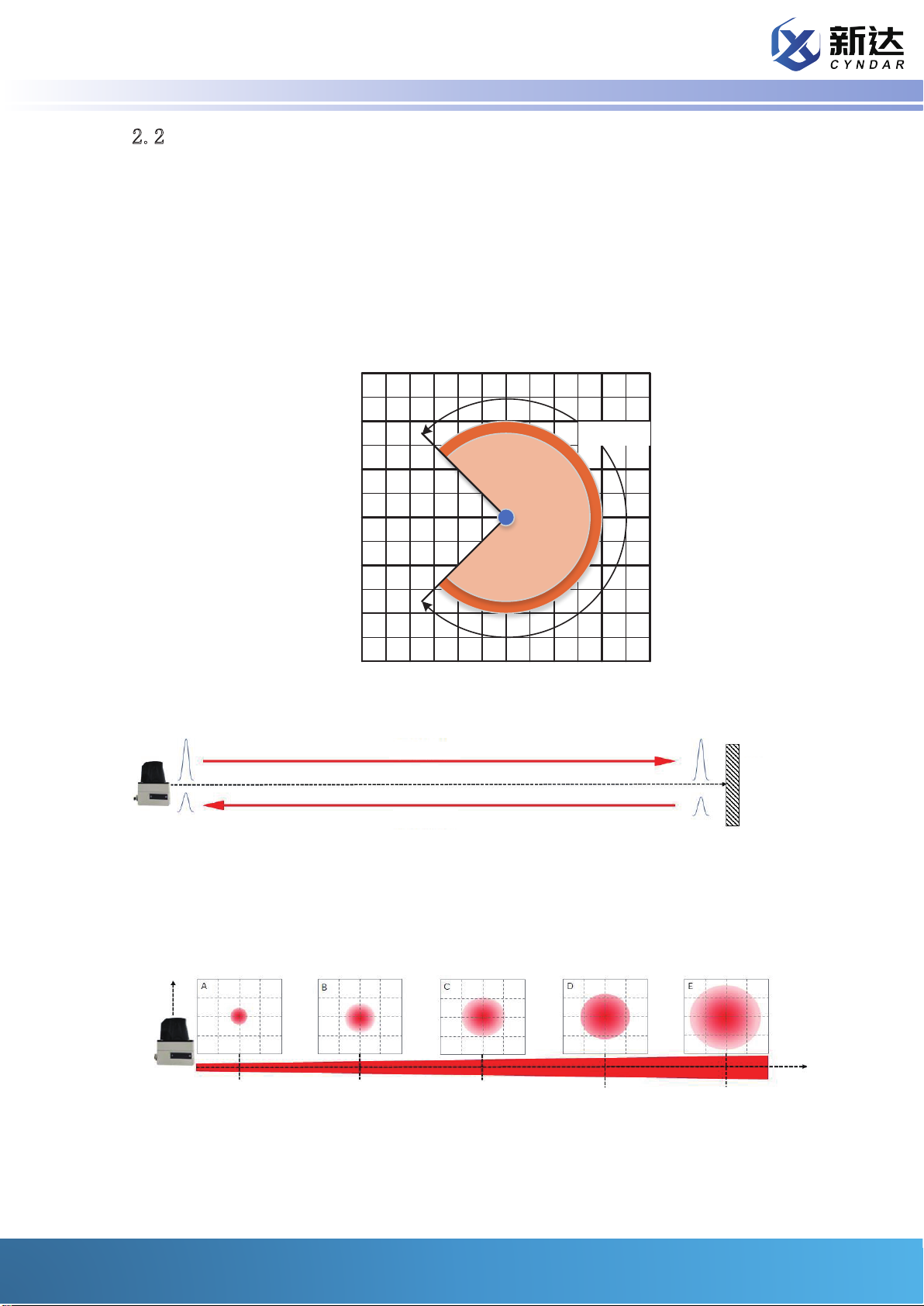
In this section, we will introduce the working mode, scanning mode and ranging performance of
XD-TOF-25 series in detail.
Within the measuring range, XD-TOF-25 can accurately measure the distance between the
object within the maximum range and the specified zero point. The measurement value
includes ranging error; in the process of continuous use, the measurement error at the same
detection distance presents a normal distribution. The following table gives the measurement
error of the statistical result at different detection distances and its standard deviation (specific
error And measurement).
Table 2-3 Ranging error within different detection distances
Ranging range
Ranging error
Standard deviation
of error distribution
The output range of XD-TOF-25 is 50mm-25000mm (the actual output is hexadecimal ASCII code,
1mm corresponds to 1h, ASCII code 30 30 30 31, 25000mm corresponds to 61A8h, ASCII code is 36
32 40 38, the specific format and details please (Refer to the section on data communication in
Section 4 Device Connection). For the ranging interval of 1-25000mm, our class has the following
division:
Table 2-4
Radar output Hex Significance
There are objects with too low reflectivity in this direction, the system cannot accurately identify
There are objects with too high reflectivity in this direction, the system cannot accurately identify
The diameter of the radar optics indicates that there is an object in the
observation direction, but the radar cannot clearly measure the
distance. Appeared in extremely special occasions, this option is to
avoid some physical conditions that we cannot understand that cause
the radar to fail to give accurate range values.
There is a certain fluctuating distance, with a maximum test relative
error of 5%. (Refer to test report)
Stable ranging distance, for normal reflectivity objects no more than
3cm ranging error