2
Table of Contents
Table of Contents ................................................................................................................................................................ 2
Introduction.......................................................................................................................................................................... 3
Manufacturer information .............................................................................................................................................. 3
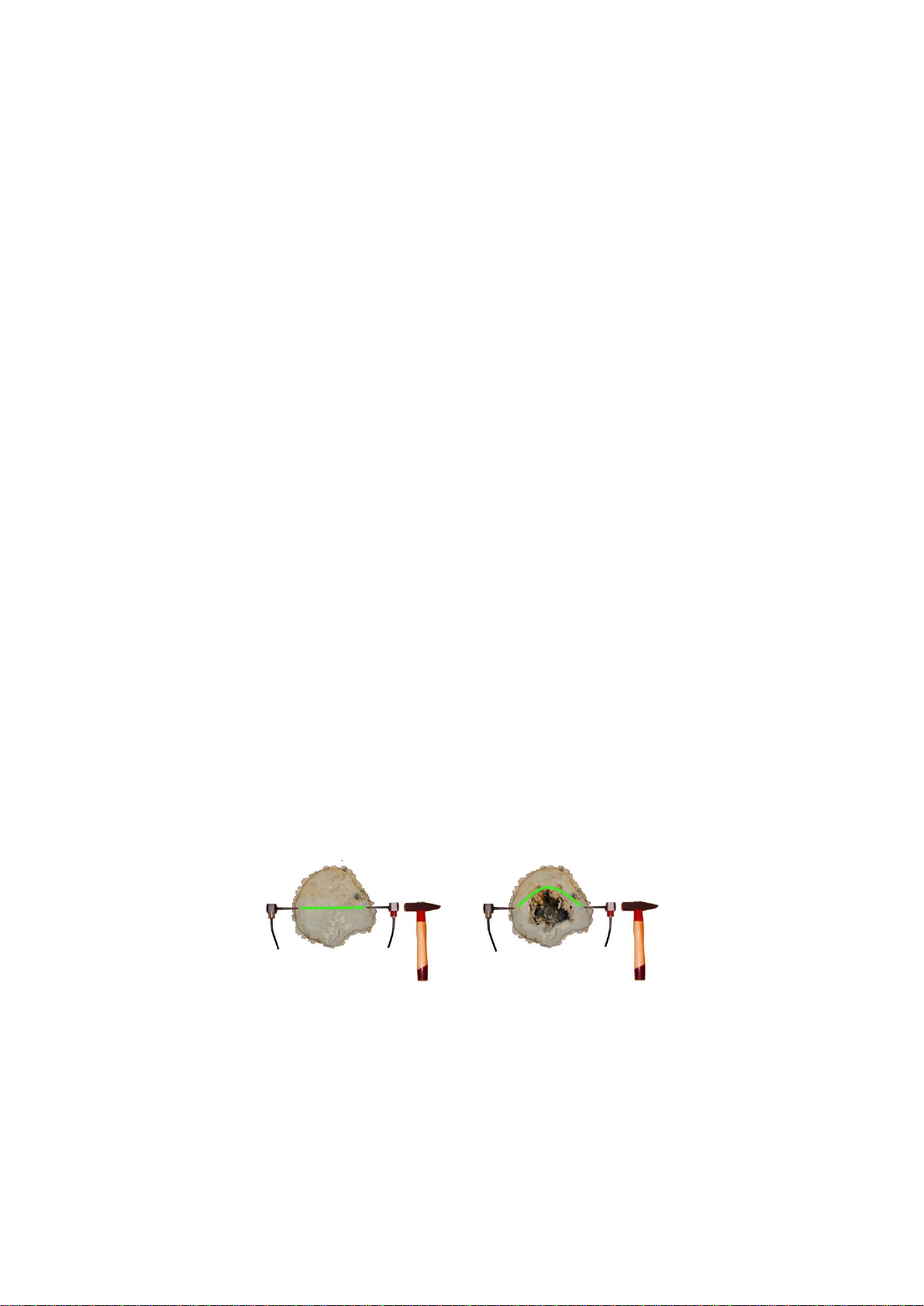
Principle of operation ....................................................................................................................................................... 3
Hardware –System parts ................................................................................................................................................ 4
Hardware –Setup............................................................................................................................................................... 5
Hardware –Handling the Piezo Sensors................................................................................................................... 6
Maintenance..................................................................................................................................................................... 6
Fixing................................................................................................................................................................................... 6
Measurement................................................................................................................................................................... 6
Removal ............................................................................................................................................................................. 6
Hardware –Amplifier boxes .......................................................................................................................................... 7
Hardware –Battery Box................................................................................................................................................... 7
Hardware –Bluetooth and serial connection.......................................................................................................... 8
Establishing Bluetooth connection to the Battery Box................................................................................... 8
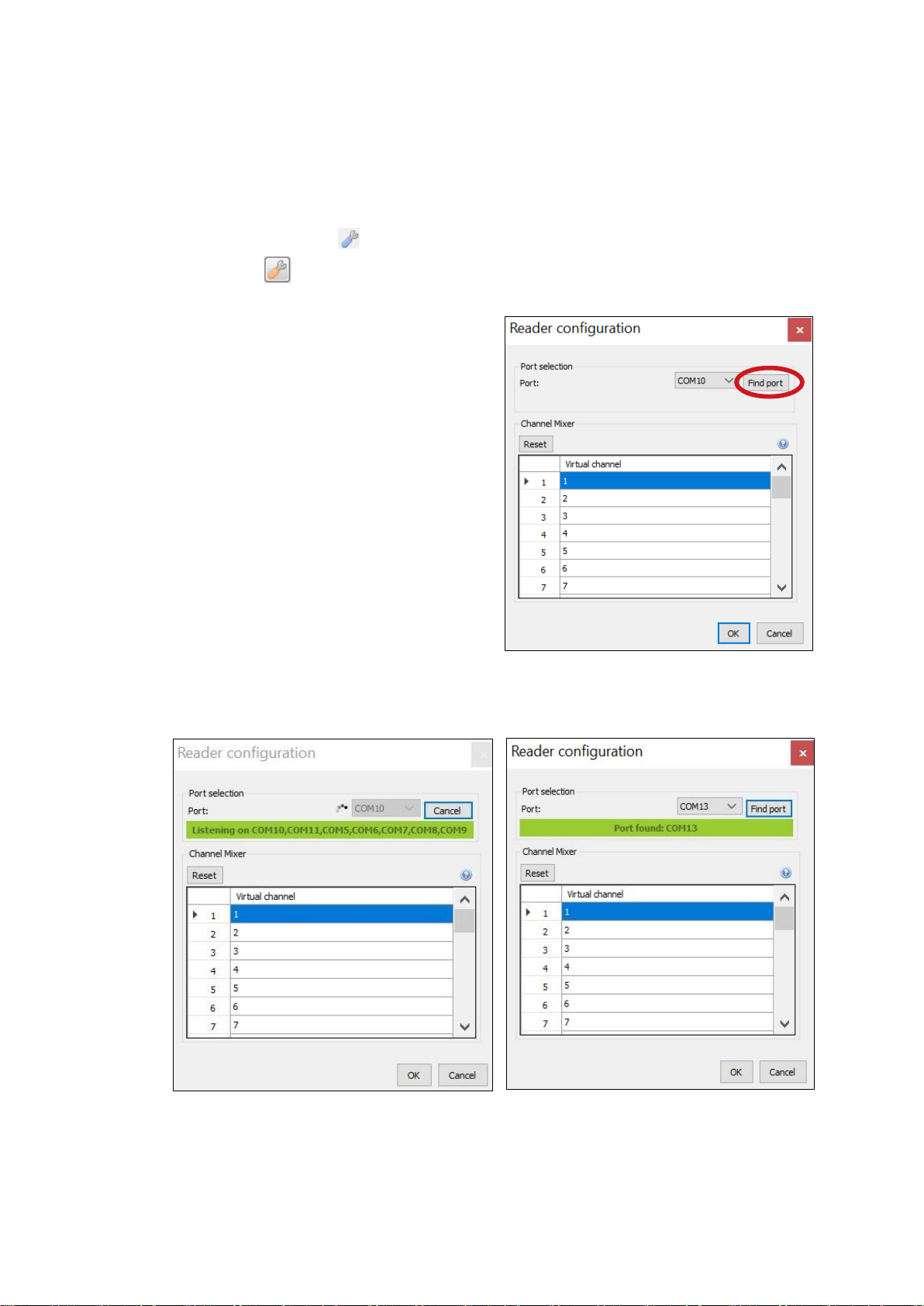
Selecting COM port........................................................................................................................................................ 9
Software –Basics ..............................................................................................................................................................11
Software –Application Settings..................................................................................................................................12
Software –Tree Properties...........................................................................................................................................13
Software –Sensor Geometry –Basics ......................................................................................................................15
Software –Sensor Geometry –Circular, Elliptical, Rectangular and Irregular .......................................16
Circular.............................................................................................................................................................................16
Elliptical ...........................................................................................................................................................................17
Rectangular.....................................................................................................................................................................17
Irregular...........................................................................................................................................................................18
Software –Sensor Geometry –Compass.................................................................................................................18
Description .....................................................................................................................................................................18
Usage.................................................................................................................................................................................18
Software –Time Data......................................................................................................................................................19
Software –Tomograms –Single-layer mode.........................................................................................................20
Software –Tomograms –Multi-layer mode ..........................................................................................................21
Software –Biomechanics...............................................................................................................................................22
Software –Image Container .........................................................................................................................................24
Software –Generating reports....................................................................................................................................25
Report generator –earlier version.......................................................................................................................25
Testing and troubleshooting........................................................................................................................................26
Testing before going to the field............................................................................................................................26
Most common troubles and solutions.................................................................................................................27
Advice and safety regulations......................................................................................................................................30
Maintenance........................................................................................................................................................................31
Guarantee.............................................................................................................................................................................31