1 INTRODUCTION .................................................................................................1
1.1 IMPORTANT SAFEGUARDS AND WARNINGS....................................2
1.2 Models .........................................................................................................2
2 QUICK START......................................................................................................3
2.1 Overview......................................................................................................3
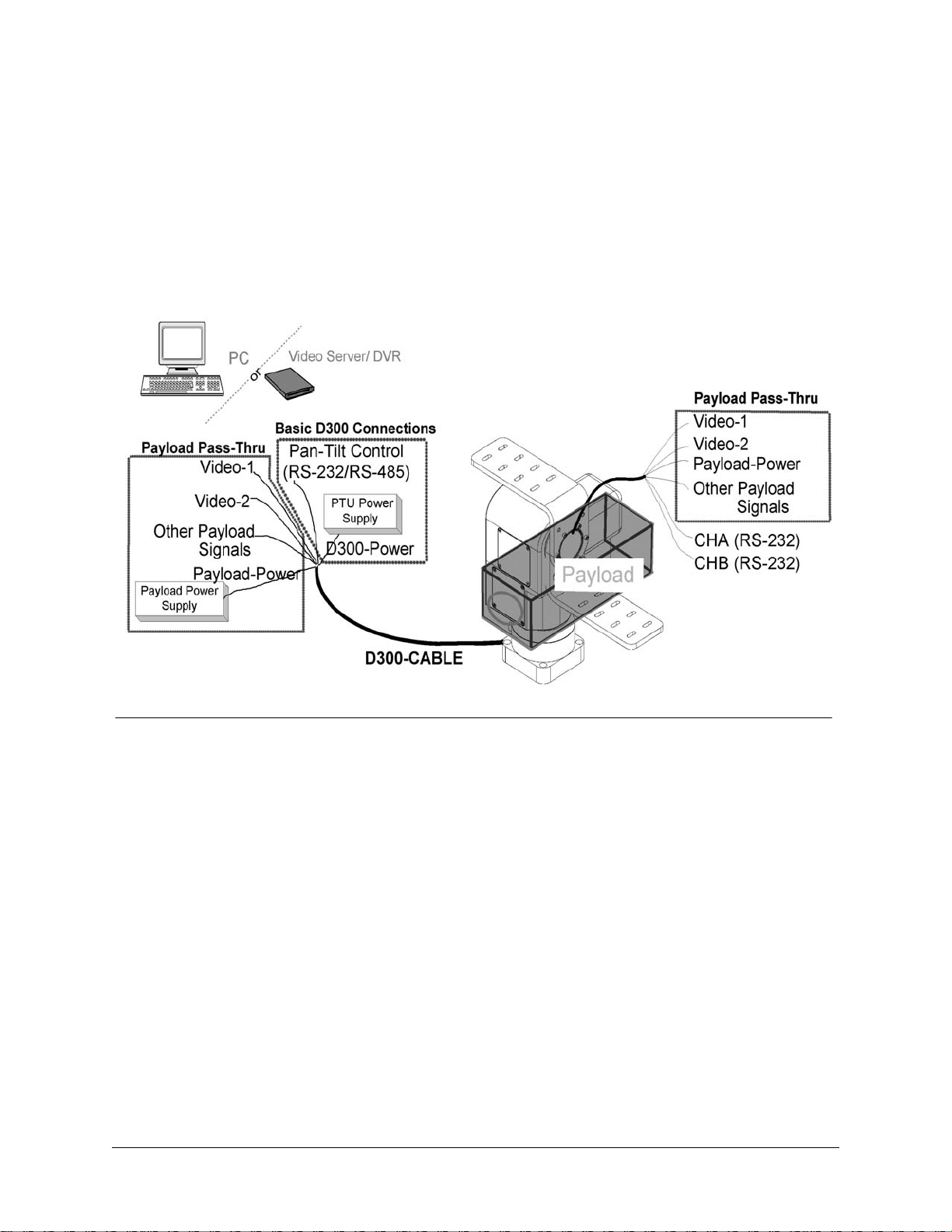
2.2 Installation Components ..............................................................................3
2.3 Basic Setup Steps.........................................................................................4
3 INSTALLATION & INITIAL SETUP ................................................................5
3.1 Pan-Tilt Mounting........................................................................................5
3.2 Wiring and Connectors ................................................................................5
3.3 Power Sources..............................................................................................6
3.4 RS-232 Interface and Host Settings.............................................................7
3.5 Initial Power-up and Test.............................................................................8
3.6 Basic Pan-Tilt Unit Commands ...................................................................8
3.7 Mounting Your Payload...............................................................................8
3.7.1 Over-the-Top Bracket Mounting......................................................9
3.7.2 Side-Mount Bracket Mounting........................................................9
3.8 Payload Wiring Connections .....................................................................10
4 COMMAND REFERENCE................................................................................11
4.1 Binary Command Format ..........................................................................11
4.2 General ASCII Command Format.............................................................11
4.3 Positional Control Commands & Queries .................................................11
4.3.1 Position (absolute) .........................................................................11
4.3.2 Offset Position (relative offset)......................................................12
4.3.3 Resolution per Position..................................................................12
4.3.4 Limit Position Queries...................................................................13
4.3.5 Position Limit Enforcement...........................................................13
4.3.6 Immediate Position Execution Mode.............................................14
4.3.7 Slaved Position Execution Mode...................................................14
4.3.8 Await Position Command Completion ..........................................15
4.3.9 Halt Command...............................................................................15
4.3.10 Monitor (Autoscan) Command......................................................16
4.3.11 Position Presets..............................................................................16
4.4 Speed Control Commands & Queries........................................................17
4.4.1 Speed Control & Relevant Terms..................................................17
4.4.2 Speed (absolute).............................................................................17
4.4.3 Delta Speed (relative offset) ..........................................................18
4.4.4 Acceleration...................................................................................19
4.4.5 Base (Start-Up) Speed....................................................................19
4.4.6 Speed Bounds ................................................................................20
4.4.7 Speed Control Modes.....................................................................20
4.5 Unit Commands.........................................................................................21