FOHEART X User manual

FOHEART Technology Co.,Ltd.
www.foheart.com

Inertial Motion Capture System FOHEART·X User Manual V20191125150
- I - ©FOHEART www.foheart.com
Preface
⚫Definition
1.FOHEART refers to FOHERT Technology Co.,Ltd.
⚫Copyright
The information contained in the user manual is the proprietary information of FOHEART.
Without permission, this document shall not be copied, transmitted, edited or used. Those who break
the law will be held liable for compensation.
⚫Statement
FOHEART provides this information to customers as a service. The information provided is
based on the customer's needs. FOHEART goes to great lengths to ensure the accuracy of the
information he provides. FOHEART makes no warranty or liability for any injury, loss or damage
caused by use or reliance on the information contained in this manual. All information is subject to
change without prior notice.
⚫Scope of application
Products suitable for reference in this manual are inertial motion capture system FOHEART®·X
and software MotionVenus®.As the software MotionVenus® is being upgraded constantly, it will be
different according to different functions of the software version. This manual is prepared according
to MotionVenus1.5.0. Please update the latest version of the software.
Note: please refer to the latest version of the manual.
Manual update date: November 25, 2019, manual version number: 20191125150

Inertial Motion Capture System FOHEART·X User Manual V20191125150
- II - ©FOHEART www.foheart.com
Introduction
FOHEART·X inertial motion capture system adopts MEMS sensors such as accelerometer, gyroscope
and magnetometer and outputs attitude data with higher accuracy through data fusion algorithm. Its
software, MotionVenus, is the computer client software of FOHEART·X, which adopts inverse
kinematics, kalman filtering, biomechanics and other algorithms, and can display 3D characters,
various data and forward data in real time. It can also be compatible with Unity, UE, MotionBuilder,
Maya, 3dMax and other software. FOHEART·X is widely used in sports, medical rehabilitation,
animation film, television and game production, virtual anchors, human-computer interaction and
other fields.

Inertial Motion Capture System FOHEART·X User Manual V20191125150
CONTENTS
INTRODUCTION ..................................................................................................................................... II
CONTENTS.................................................................................................................................................
PART Ⅰ HARDWARE................................................................................................................................ 1
1 Attitude Sensor ................................................................................................................................. 1
1.1 Sensor Parameters......................................................................................................................... 1
1.2 Attitude sensor switch................................................................................................................. 1
2 THE ROUTER ......................................................................................................................................... 2
2.1 Parameters .................................................................................................................................... 2
2.2 External antenna............................................................................................................................ 2
3 CHARGING STRIP ................................................................................................................................... 2
3.1 Parameters.................................................................................................................................... 3
PART Ⅱ QUICK SERVICE EQUIPMENT.............................................................................................. 3
1 Links and software downloads .......................................................................................................... 3
1.1 Connect router............................................................................................................................... 3
1.2 Software downloads ...................................................................................................................... 3
2 Wear ................................................................................................................................................ 4
2.1 Dressing diagram........................................................................................................................... 4
2.2 Install sensor.................................................................................................................................. 6
1 INTRODUCTION...................................................................................................................................... 7
2 SOFTWARE DOWNLOAD.......................................................................................................................... 7
3 SOFTWARE INSTALLATION AND OPERATION ............................................................................................. 7
3.1 Software installation...................................................................................................................... 7
3.2 Software runs .............................................................................................................................. 10
4 SOFTWARE VERSION ............................................................................................................................ 10
5 DEVICE LIST BAR ................................................................................................................................. 13
5.1 The basic function........................................................................................................................ 13
5.2 Display the data........................................................................................................................... 14
5.3 Advanced Settings........................................................................................................................ 16
6 SENSOR FIELD CALIBRATION ................................................................................................................ 16
7 SET LENGTH OF BODY BONE ................................................................................................................. 18
8 POSTURE CALIBRATION ........................................................................................................................ 19
9 3D CHARACTER DISPLAY WINDOW ........................................................................................................ 21
9.1 View ............................................................................................................................................ 21
9.2 Real-time mode and playback mode............................................................................................. 22
9.3 Other buttons .............................................................................................................................. 22
10 THE TIMELINE ................................................................................................................................... 22
11 THE DATA FILE ................................................................................................................................... 23
11.1 Functions overview .................................................................................................................... 23

Inertial Motion Capture System FOHEART·X User Manual V20191125150
11.2 The packaged file....................................................................................................................... 24
11.3 Export the data within the scope of the timeline......................................................................... 24
11.4 The playlist ................................................................................................................................ 26
11.5 Attribute.................................................................................................................................... 27
12 GRAPHICS AREA ................................................................................................................................ 27
13 KINEMATICS ...................................................................................................................................... 28
14 THE MENU BAR - SET UP -OPTION ....................................................................................................... 29
14.1 Shortcuts ................................................................................................................................... 29
14.2 The plug-in................................................................................................................................. 29
14.3 Posture calibration..................................................................................................................... 31
14.4 Export data................................................................................................................................ 31
14.5 The data file............................................................................................................................... 32
14.6 The software Settings................................................................................................................. 32
15 THE CAMERA TO RECORD ................................................................................................................... 33
15.1 Used to prepare ......................................................................................................................... 33
15.2 Video recording parameters ....................................................................................................... 34
16 DEFINITION OF COORDINATE SYSTEM.................................................................................................. 34
16.1 Sensor coordinate system definition ........................................................................................... 34
16.2 Quaternion and euler Angle coordinate system definition ........................................................... 34
16.3 Definition of skeletal coordinate system...................................................................................... 34
16.4 Unity3D Coordinate system ........................................................................................................ 35
17 COMMON PROBLEMS.......................................................................................................................... 36
18 EQUIPMENT USE PROBLEM ................................................................................................................. 37
19 MATTERS NEEDING ATTENTION........................................................................................................... 38
PART Ⅲ SDK AND PLUG-IN................................................................................................................ 38
1MOTIONVENUS SDK...................................................................................................................... 38
1.1 Brief introduction......................................................................................................................... 38
1.2 Method of use.............................................................................................................................. 38
1.3 Functional description.................................................................................................................. 38
1.4 Data type in units......................................................................................................................... 38
1.5 Skeletal correspondence............................................................................................................... 38
1.6 Usage scenarios........................................................................................................................... 40
2UNITY REAL-TIME PLUG-IN ............................................................................................................. 40
2.1 Download plug-in package........................................................................................................... 40
2.2 Modeling recommendations......................................................................................................... 40
2.3 Plug-in usage process................................................................................................................... 41
2.4 Demo........................................................................................................................................... 46
2.5 how to solve the problems of model sliding/floating or feet under the ground after binding?........ 46
2.6 points for attention ...................................................................................................................... 48
3 UE4 REAL-TIME PLUG-IN ..................................................................................................................... 49
3.1 Introduction................................................................................................................................. 49
3.2 Application method...................................................................................................................... 49
4MOTIONBUILDER REAL-TIME PLUGIN .............................................................................................. 54

Inertial Motion Capture System FOHEART·X User Manual V20191125150
4.1 Introduction................................................................................................................................. 54
4.2 Usage method ............................................................................................................................. 54
4.3 Function and problem description ................................................................................................ 58
CONTACT US......................................................................................................................................... 59

Inertial Motion Capture System FOHEART·X User Manual V20191125150
1 / 65 Explore for the unknown beauty @FOHEART www.foheart.com
PART Ⅰ HARDWARE
1 Attitude Sensor
Introduction: the sensor has built-in triaxial accelerometer, triaxial gyroscope and triaxial
magnetometer.
1.1 Sensor Parameters
NO.
Parameters
Note
1
Attitude accuracy
Dynamic accuracy
Roll/Pitch≤1deg
Pitch≤2deg(RMS)
The measurement
accuracy will be different
under different
environmental
conditions.
static accuracy
Roll/Pitch≤0.2deg
Pitch≤0.5deg(RMS)
2
weight
20g
————————
3
Acceleration range
±8g/±16g
Factory default is ±16g
4
Angular velocity range
±2000dps/s
————————
5
Angular resolution
0.02deg
————————
6
Attitude measurement
range
Three axis 360deg
————————
7
Maximum rate
200fps
————————
8
Sensor working hours
3-3.5 hours
There will be attenuation
as the battery is used
9
Sensors transmit
frequency band
wirelessly
2.4GHz
————————
10
Sensor size
The diameter of 44mm,
The thickness of the:
16mm
————————
1.2 Attitude sensor switch
Power on: short press (<1 second) switch button;Shutdown: long press the switch button for more
than 2 seconds and release the button.

Inertial Motion Capture System FOHEART·X User Manual V20191125150
2 / 65 Explore for the unknown beauty @FOHEART www.foheart.com
2 The router
2.1 Parameters
NO.
Parameters
Note
1
weight
87g
———————
2
size
The diameter of 100mm, The
thickness of 23mm
———————
3
Connect to sensor
mode
wireless 2.4 GHz
———————
4
Connect to computer
mode
USB2.0
———————
2.2 External antenna
For further communication distance, connect the router external high-gain antenna.
3 Charging strip
Description: The distributor can charge 17 sensors at the same time.
Please insert the adapter plug into the charging base before inserting the other end plug, and then
press the "round" switch button of the insertion row. When the switch light is on and the sensor light
is on, it means that the sensor starts to charge normally.

Inertial Motion Capture System FOHEART·X User Manual V20191125150
3 / 65 Explore for the unknown beauty @FOHEART www.foheart.com
3.1 Parameters
NO.
Parameters
Note
1
weight
670g
———————
2
size
The diameter of230mm,
The thickness of 37mm
———————
PART Ⅱ Quick service equipment
1 Links and software downloads
1.1 Connect router
Step 1: plug one end of the USB cable into the computer and the other end into the USB port of the
router.
Step 2: power on the router.
1.2 Software downloads
Download the latest version of the software from the official website
http://www.foheart.com/software/motionvenus.html.

Inertial Motion Capture System FOHEART·X User Manual V20191125150
4 / 65 Explore for the unknown beauty @FOHEART www.foheart.com
2 Wear
2.1 Dressing diagram

Inertial Motion Capture System FOHEART·X User Manual V20191125150
5 / 65 Explore for the unknown beauty @FOHEART www.foheart.com
Note: the light guide column of the sensor on the foot must be parallel to the front.There is no

Inertial Motion Capture System FOHEART·X User Manual V20191125150
6 / 65 Explore for the unknown beauty @FOHEART www.foheart.com
limit to sensors in other parts of the body, but they must correspond to the parts of the body
labeled by the sensor label.
2.2 Install sensor
When installing the sensor, place the light guide column in the same direction as the arrowhead of the
base, then rotate 90° clockwise to fix the sensor, and rotate 90° counterclockwise to remove the sensor.
Lock
Unlock
Inertial Motion Capture System FOHEART·X User Manual V20191125150
7 / 65 Explore for the unknown beauty @FOHEART www.foheart.com
PART Ⅲ About the software
1 Introduction
MotionVenus® is a computer client software that is compatible with the FOHEART·X motion capture
system suite.Its main function is to fit the data of the sensor, record the data, and export the data into
BVH, FBX and other commonly used data formats in the animation industry. In addition, it can also
send the motion data stream of performers to Unity3D,Unreal Engine 4,Motionbuilder and other game
engines in real time (or offline) to drive the movement of any virtual animated character.At the same
time, it can also display various indicators of human kinematics data, such as acceleration, angular
velocity, joint Angle.
2 Software download
(1) Software and plug-in download address http://www.foheart.com/software/motionvenus.html or
https://github.com/foheart
(2) www.foheart.com and https://github.com/foheart Is currently the only official download address,
Be sure to download software and plug-ins from the specified address.
3 Software installation and operation
3.1 Software installation
Fig.3.1.1. Installation page 1
Inertial Motion Capture System FOHEART·X User Manual V20191125150
8 / 65 Explore for the unknown beauty @FOHEART www.foheart.com
Fig3.1.2. Installation page 2
Fig.3.1.3. Installation page 3

Inertial Motion Capture System FOHEART·X User Manual V20191125150
9 / 65 Explore for the unknown beauty @FOHEART www.foheart.com
Fig.3.1.4. Installation page 4
Fig.3.1.5. Installation page 5

Inertial Motion Capture System FOHEART·X User Manual V20191125150
10 / 65 Explore for the unknown beauty @FOHEART www.foheart.com
Fig.3.1.6. Installation page 6
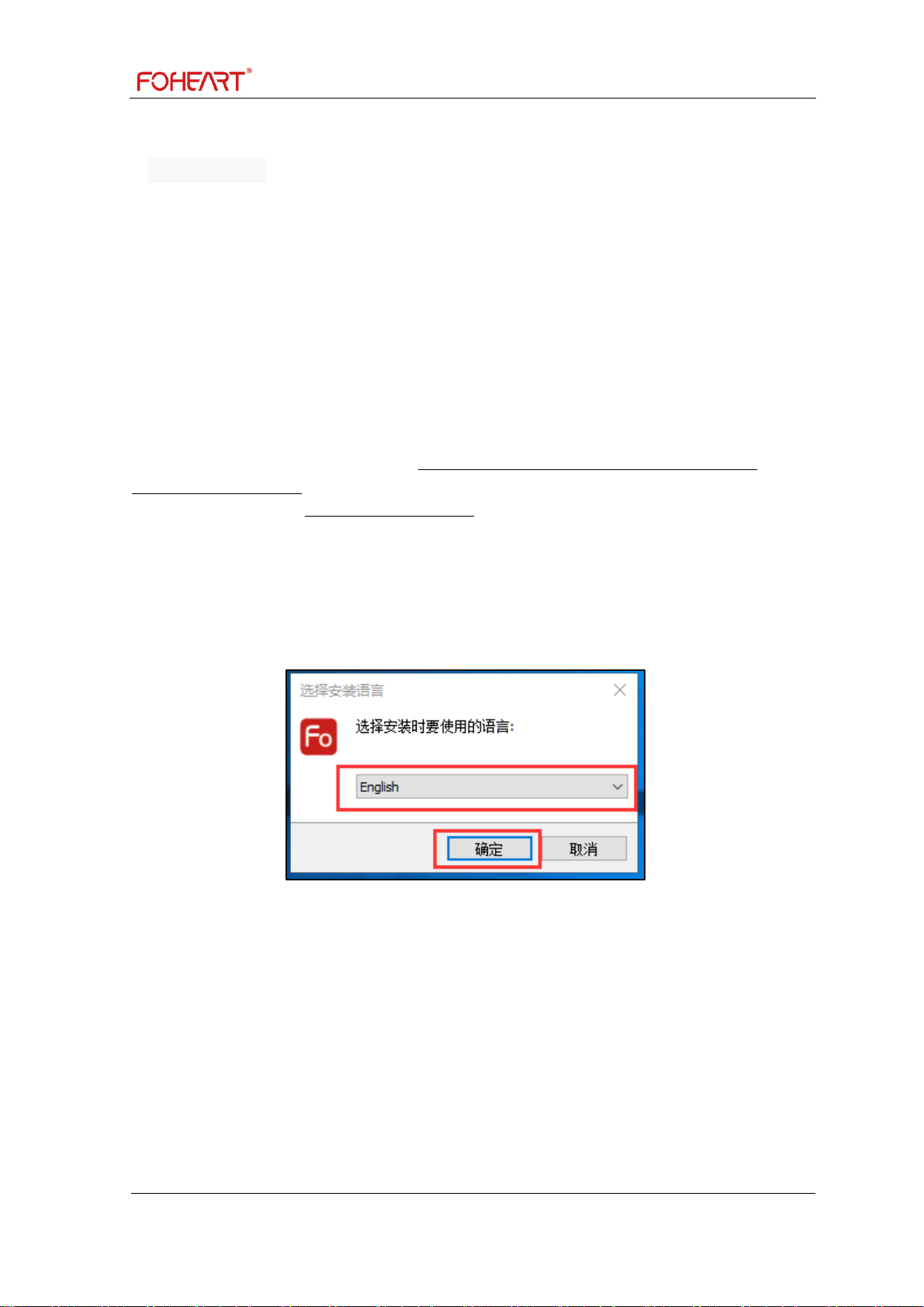
(1) installation page 1 you can choose the initialization interface language after installation of the
software. At present, the software supports "simplified Chinese", "English" and "Japanese". Click the
"ok" button to enter the next page.
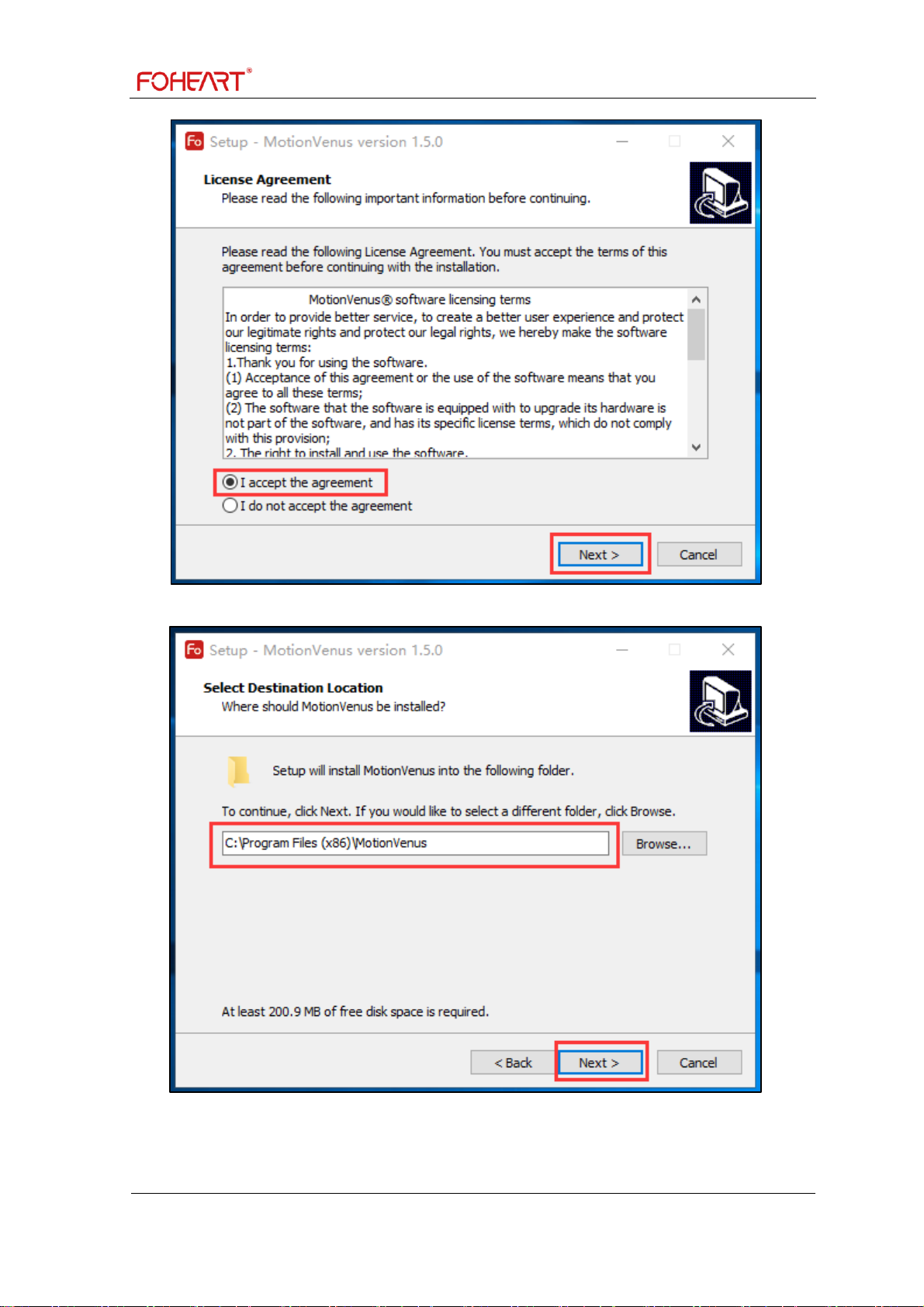
(2) only if you agree to the software license terms can you enter the next installation page. As shown
in figure 3.1.2.
(3) select the installation directory. Click "next" to go to the next page. Note: installation directory
does not appear in Chinese characters. As shown in figure 3.1.3. This page will appear when you
install the software for the first time or after uninstalling the software. If you upgrade the software or
install different versions, this page will not appear.
(4) by default, it will "create desktop shortcut" and click next. As shown in figure 3.1.4.
(5) click the "install" button to start installing the software. As shown in figure 3.1.5.
(6) completion of installation. MotionVenus is not run by default. Click the "finish" button to
complete the software installation. As shown in figure 3.1.6. Note: the red box "install hands driver"
in figure 3.1.6 is the driver for installing the data glove of a third party company. If you do not need
the data glove of a third party company, you do not need to check here.
3.2 Software runs
The software should run with the permission of "run as administrator".
4 Software version
Software version
No.
Version
Release date
description
1
V1.0.1
January 9, 2017
____________________________________
2
V1.2.1
April 17, 2017
____________________________________

Inertial Motion Capture System FOHEART·X User Manual V20191125150
11 / 65 Explore for the unknown beauty @FOHEART www.foheart.com
3
V1.2.6
June 10, 2017
____________________________________
4
V1.2.8
July 24, 2017
____________________________________
5
V1.3.0
August 26, 2017
1. Added the network transmission of offline
data, supported up to five groups, and played
multiple offline data streams in Unity3D and
UE4.
2. Modify the network data transmission to
be automatically forwarded in the
background.
3. Added details page of RAW file to view
internal information.
4. Added euler Angle rotation sequence
setting in the drawing area, supporting all six
rotation sequences.
5. Multi-language switch has been added, and
English is now supported.
6. Interactive help function has been added.
Click the question mark button in the upper
right corner of each component to get the
network help document related to this
component.
7. Added the Biped BVH format directly
exported to 3Ds Max.
8. Sensor calibration video is added.
9. Fully support the selection of frame rate
for all movie and TV playback and export,
and add standard support such as PAL and
NTSC.
10.other details bug fixes.
6
V1.3.2
December 3, 2017
____________________________________
7
V.1.3.4
February 11, 2018
1. Increase the obvious visual reminder after
the sensor is subjected to serious magnetic
interference.
2. Add automatic monitoring function of
recording folder, and the list will be updated
automatically after adding or deleting files.
3. Fixed incorrect number of detection router
and charging base.
4. Software automatic update function has
been added. Please check whether there is a
new version in help -> check update.
5. Corrected the slight difference of
displacement data in network data stream
(this problem will affect unity3d.ue4 and
MotionVenusSDK).
6. The sensor calibration interface adds a
separate calibration button for each sensor.
7. Optimized the algorithm to improve the
speed and success rate of sensor calibration.
8. Fixed non-integer frame rate playback bug.
9. Fixed quaternion. Invalid rotation order of
euler Angle in UDP sending configuration.
10. Dozens of bugs and details optimization.
8
V1.3.6
April 5, 2018
1. Fixed incorrect frame number of BVH
exported data.
2. Built-in Unroll and Gimble repair
mechanism, directly export the correct FBX,

Inertial Motion Capture System FOHEART·X User Manual V20191125150
12 / 65 Explore for the unknown beauty @FOHEART www.foheart.com
without correction in MotionBuilder.
3. Added the function of using the game
engine to control MotionVenus. See this
function in the technical blog:
http://blog.foheart.com/?P = 66
4. Bug and detail optimization.
9
V1.3.8
April 29, 2018
1. Attitude calculation can automatically deal
with most problems such as jumping up and
down, sliding, etc.
2. Added the file packaging function, which
is convenient to copy the moving capture file
to any location quickly.
3. Added the original data export function,
see http://blog.foheart.com/ for details
4. Bug and detail optimization.
10
V1.4.0
May 19, 2018
1. Optimization of attitude solution
performance.
2. Optimize the main page of the software.
3. User configuration retention function.
4. Custom animation library path /.RAW file
association and other functions.
5. Bug and detail optimization.
11
V1.4.2
July 7, 2018
1. UDP protocol adds support for extended
data (acceleration, magnetometer,
gyroscope).
2. Correction of UDP protocol string type
accuracy.
3. Modified. CSV file format and added data
support for bone, joint and gravity.
4. Optimize the connection stability of USB
devices.
5. Some bugs and details optimization.
12
V1.4.4
April 3, 2019
____________________________________
13
V1.4.6
June 13, 2019
____________________________________
14
V1.4.8
June 25, 2019
1. Added driven-free mode support for
receiver, compatible with win7/8/10;This
mode requires new hardware support.But this
version of the software is compatible with all
of fusin's motion-capture systems.
2. Bug and detail optimization.
15
V1.5.0
November 25, 2019
1. Optimized the calculation model of lower
body posture.
2. Enhanced kinesiology data.
3. Improved the software interface.
Note
For more information, please visit our official website.

Inertial Motion Capture System FOHEART·X User Manual V20191125150
13 / 65 Explore for the unknown beauty @FOHEART www.foheart.com
5 Device list bar
Fig.5.1. Device list bar
5.1 The basic function
(1) each device connected to the software is loaded into a tree list, which shows in detail the
connection status, magnetic interference status and residual power of each sensor, as well as the
firmware version.
(2) data files opened in the data files form will also be displayed here.
(3)when MotionVenus is connected to several sets of equipment at the same time, the system
automatically Numbers the equipment, such as: Actor1(Live), Actor2(Live), Actor3(Live)..., under
each list are all the sensors in the package;You can click "Actor1(Live)" with the mouse to indicate
that this set of equipment is currently selected. The following operations (calibration and other
operations) are carried out for this set of equipment, and the background color of famous city will
become blue after the selection.(3) connection state: when the connection state is "red dot", the sensor
is not connected to the software. Please check whether the sensor is on. When the connection status is
"green dot", the sensor is normally connected. See Fig.5.1.
(4) magnetic interference: when the field of magnetic interference is shown as "Weak", it means that
the sensor is not subject to the magnetic interference of the surrounding environment. When it is
shown as "Strong", it means that the sensor is subject to the magnetic interference of the surrounding
environment.When the magnetic interference is close to the software, the software will have a visual
reminder of magnetic interference, so that even in the distance from the software, you can see a part
of the magnetic interference.
(5) electric quantity: displays the electric quantity of the corresponding sensor, and the display of

Inertial Motion Capture System FOHEART·X User Manual V20191125150
14 / 65 Explore for the unknown beauty @FOHEART www.foheart.com
electric
quantity refreshes every 10 seconds.
Fig.5.2. Shutdown and replication
(6) right click "Power Off" on the name power off all sensors. Click "Copy" to copy the current
character name, such as "Actor1(Live)".
(7) note: in the process of use, because the feet are most vulnerable to magnetic interference, when the
magnetic interference column shows abnormalities, check whether there is a strong magnetic
interference source around, if there is, keep away from it, when away from the magnetic interference,
the foot sensor can automatically return to normal state.
5.2 Display the data
Fig.5.2.1. Display the data 1
Table of contents

















