When the smart flight battery power arrives at a danger low point(10.6V,
Power below 35%) that may effect aircraft safety of return. That means the RTH
will be triggered automatically. Users should land the aircraft as soon as possible,
otherwise the vehicle will fall directly, resulting in damage. When the RTH is
triggered automatically, users can push the RTH joggle switch forward to regain
control right of aircraft if needed. Low voltage RTH warning only appears once in
a flight process.
c
lf you have questions,please contact us:www.upairdrone.com lf you have questions,please contact us:www.upairdrone.com
The place where the aircraft takes off will be recorded as home
point. In order to get that, GPS must up to at least 9 stars.
Therefore, a good GPS signal is needed for recording the home
point, otherwise the RTH mode will fail to work.
1.If you have no idea whether your home point is already recorded, you can try the following two steps to
make sure. 1. You can switch one-key-return joggle to see whither the status of flying mode on the screen
can change If can, the home point is recorded. If not, you still need to wait for searching signal. 2. or not.
You can can fly. If not, still need to waiting. also check the altitude figure is “0”or not. If it’s 0, then you
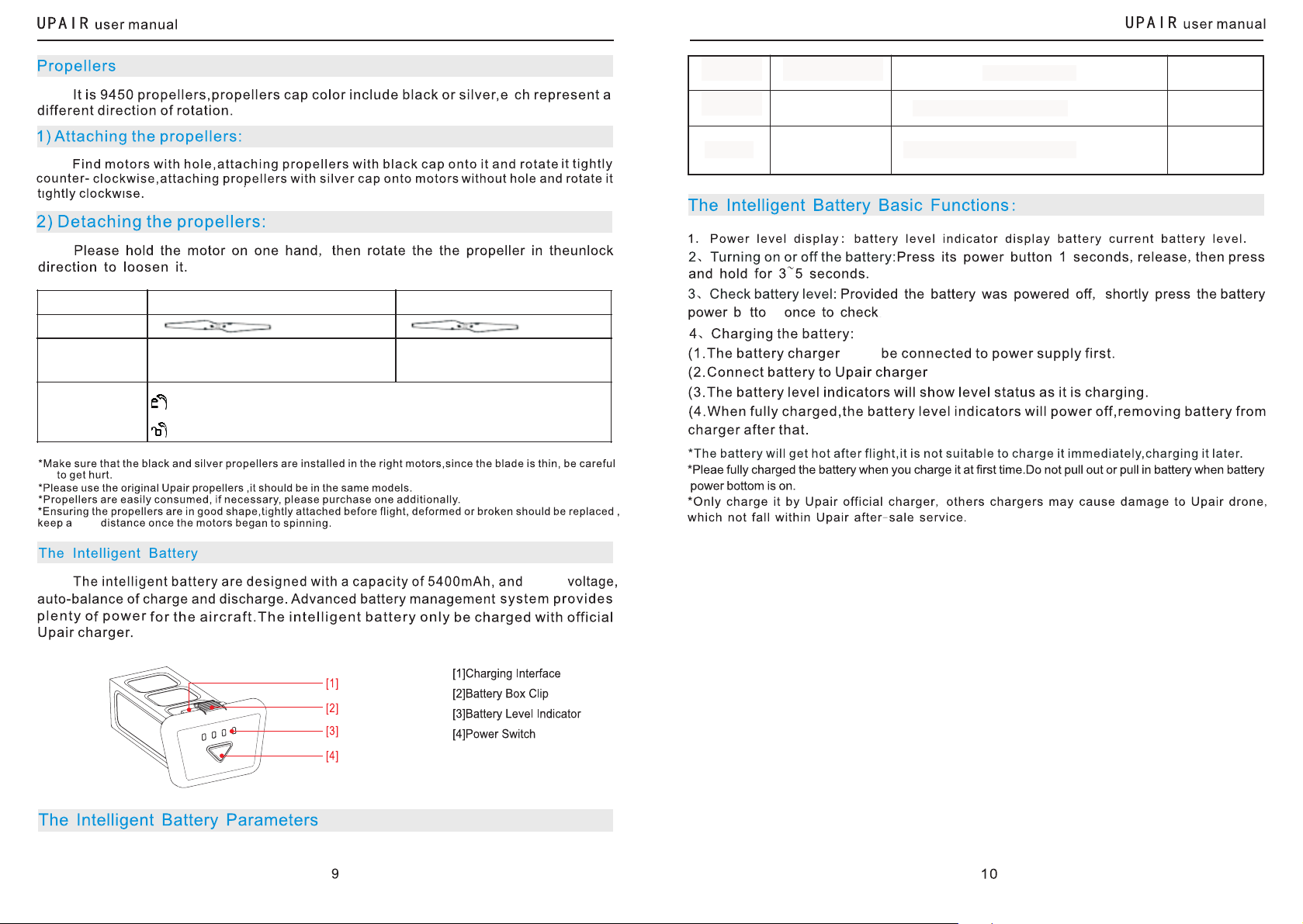
Weight (full load) 1350g Maximum Vertical Velocity 4.5m/s
Height 220mm Maximum Tilt Angle 45°
Wheelbase 355m Maximum Horizontal Speed 14m/s
Propeller 9450 Hovering horizontal accuracy 50cm
Motor 2212 Hovering vertical accuracy 50cm
Hovering time Full load(1350g)19 mins;aircraft only(1085g )25 mins
GPS Description
Home
Point
9
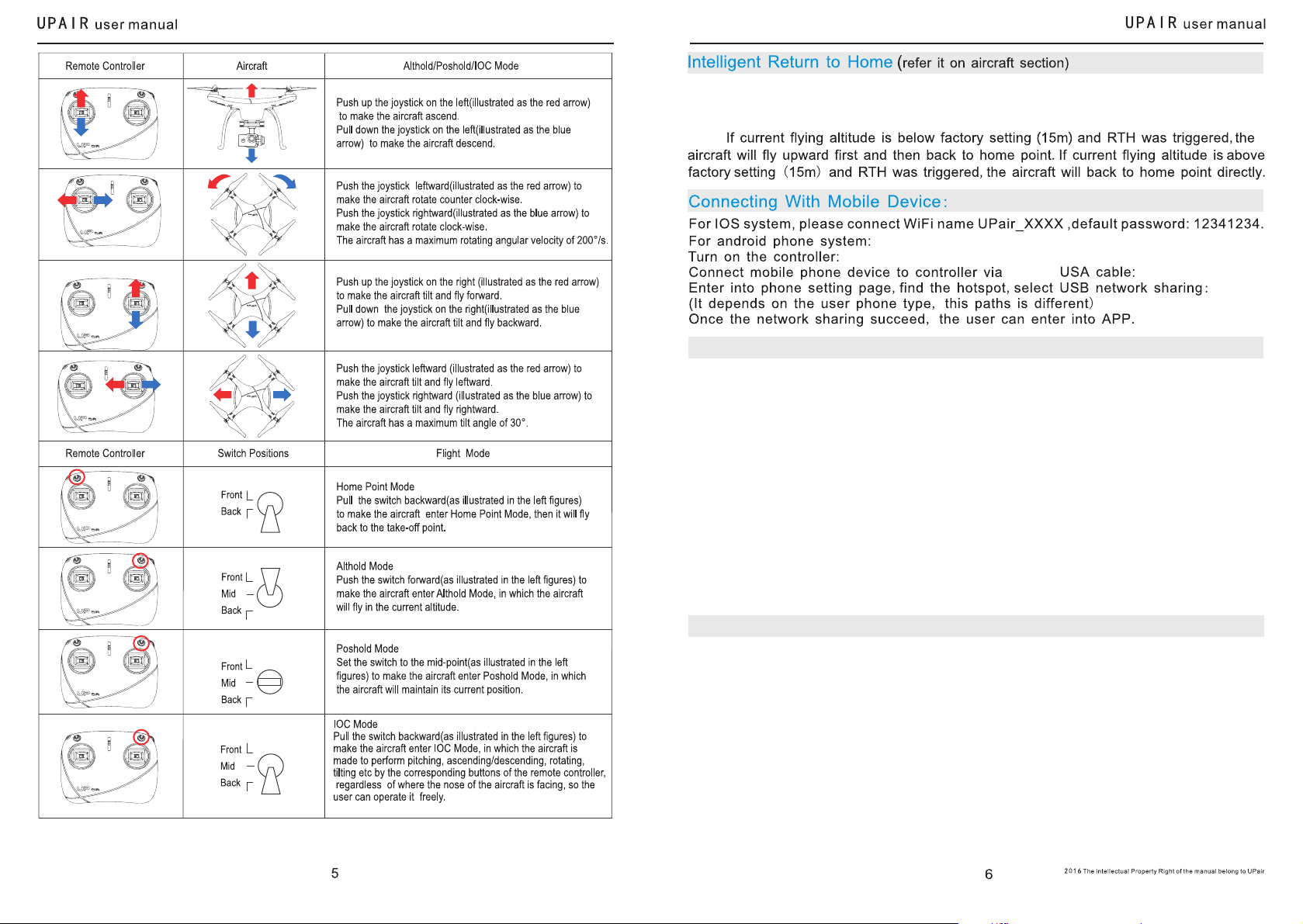
Aircraft indicator:The red indicators indicate the front of the aircraft.The green indicators
indicate the tail of the aircraft.
*
of
a
a
2. The RTH system does not support obstacles recognition, but the user can operate the controller to avoid
minutes is obstacles.
3. There is time difference in searching GPS signals according to user’s location. It will takes about 2 mimutes
to search the signal at the first time
4.During auto-flight, like auto-return, auto-landing, route planning, or follow-up mode, etc., the user can
switch the flight mode between altitude hold, position hold, and headless by using the right top joggle switch
on the controller to avoid bad situation like crashing into barriers, or falling into river, etc.