Table of Contents
Revision History ................................................................................................................. 3
Introduction......................................................................................................................... 4
Specifications...................................................................................................................... 5
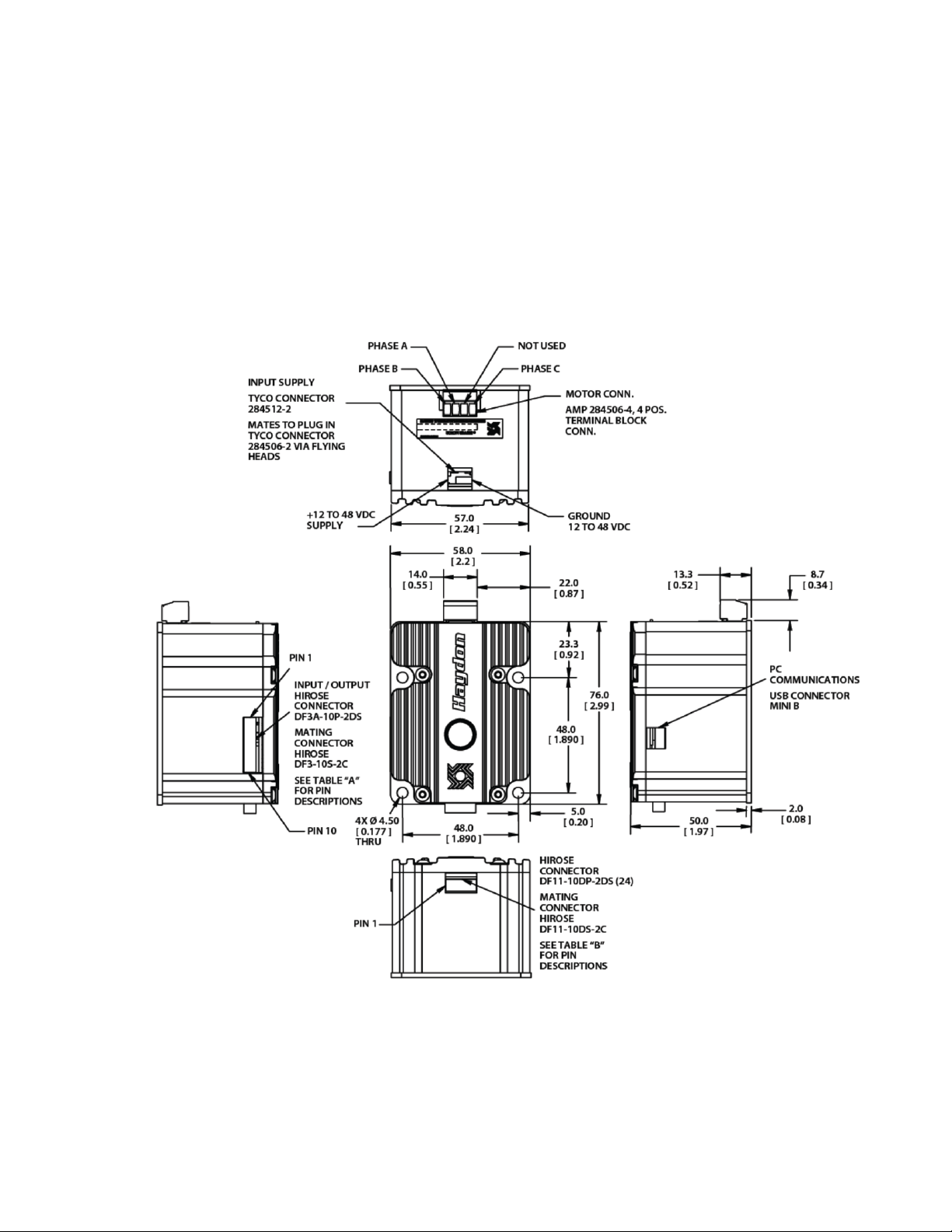
Engineering Drawings ........................................................................................................ 6
Connections......................................................................................................................... 7
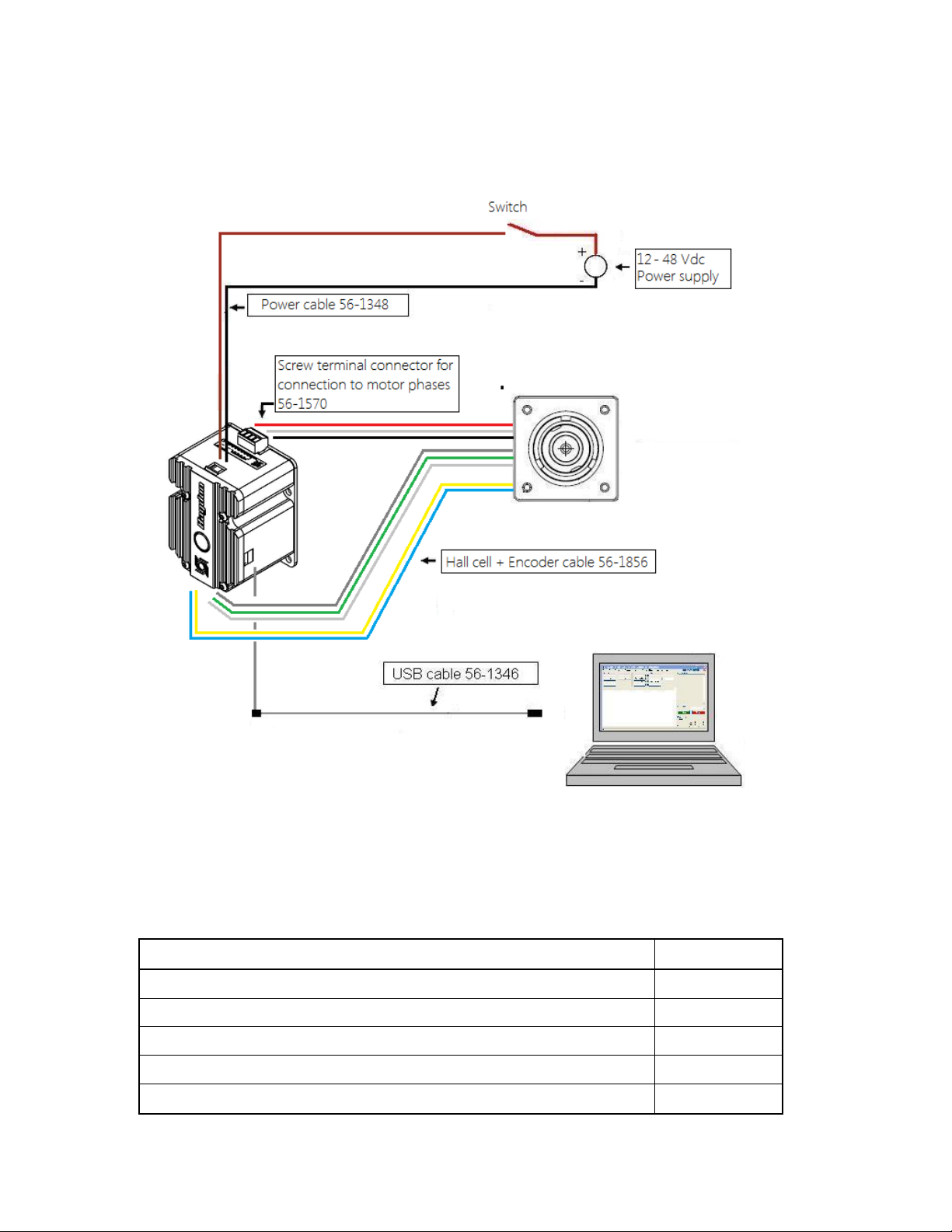
Basic Wiring Diagram ........................................................................................................ 8
Accessories ......................................................................................................................... 8
Encoder Inputs .................................................................................................................... 9
Encoder Wiring................................................................................................................. 10
Hall Cell Inputs................................................................................................................. 11
Hall Cell Wiring................................................................................................................ 11
Digital I/O Pin Descriptions.............................................................................................. 12
Open Collector Output Pin Description............................................................................ 12
Input Pin Description........................................................................................................ 12
Digital I/O Wiring............................................................................................................. 13
Digital Output Wiring Examples...................................................................................... 14
Digital Input Wiring Examples......................................................................................... 14