LOVATO ELECTRIC S.P.A.
24020 GORLE (BERGAMO) ITALIA
VIA DON E. MAZZA, 12
TEL. 035 4282111
Web: www.LovatoElectric.com
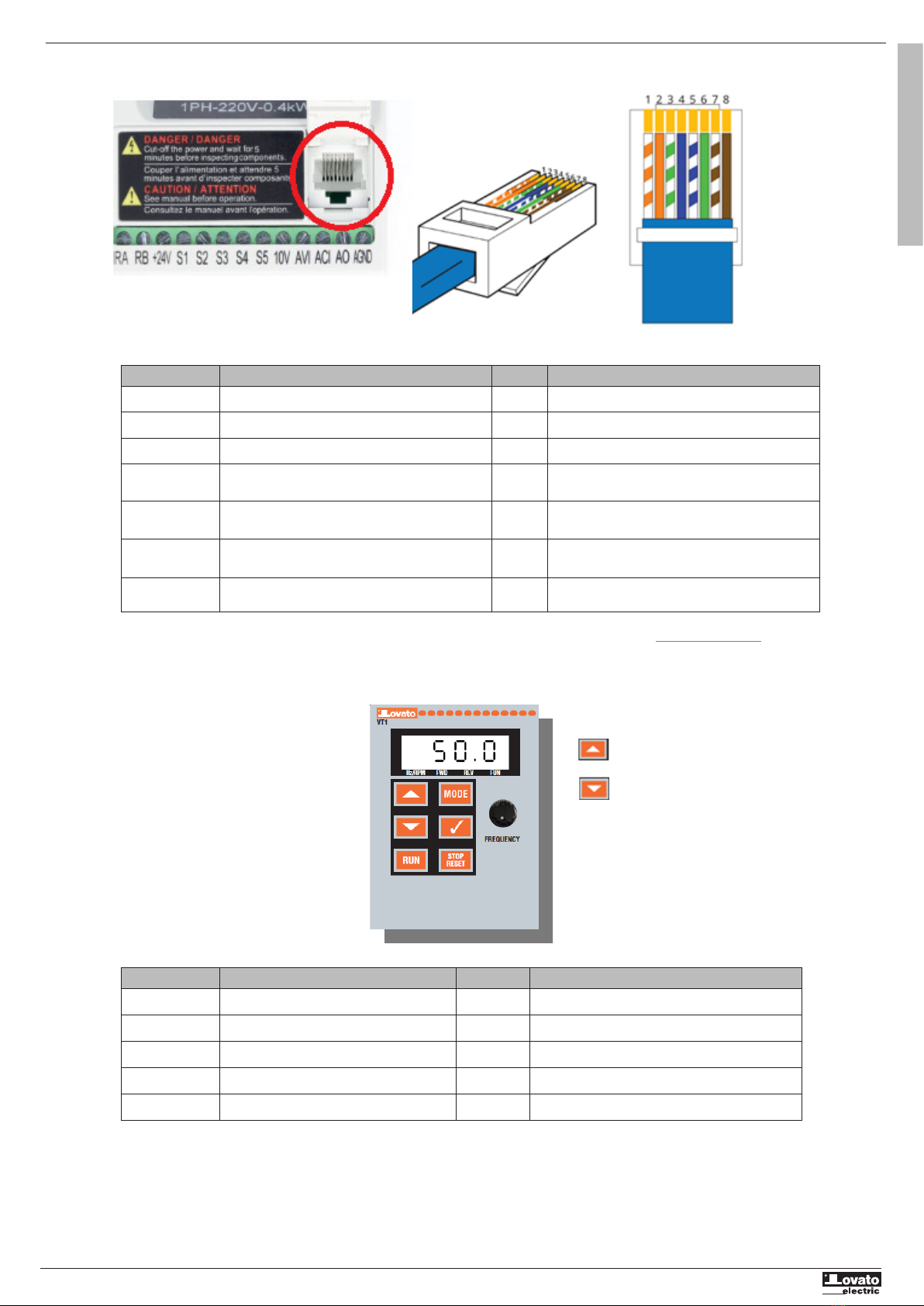
QUICK GUIDE FOR THE CONFIGURATION OF
VARIABLE SPEED DRIVES
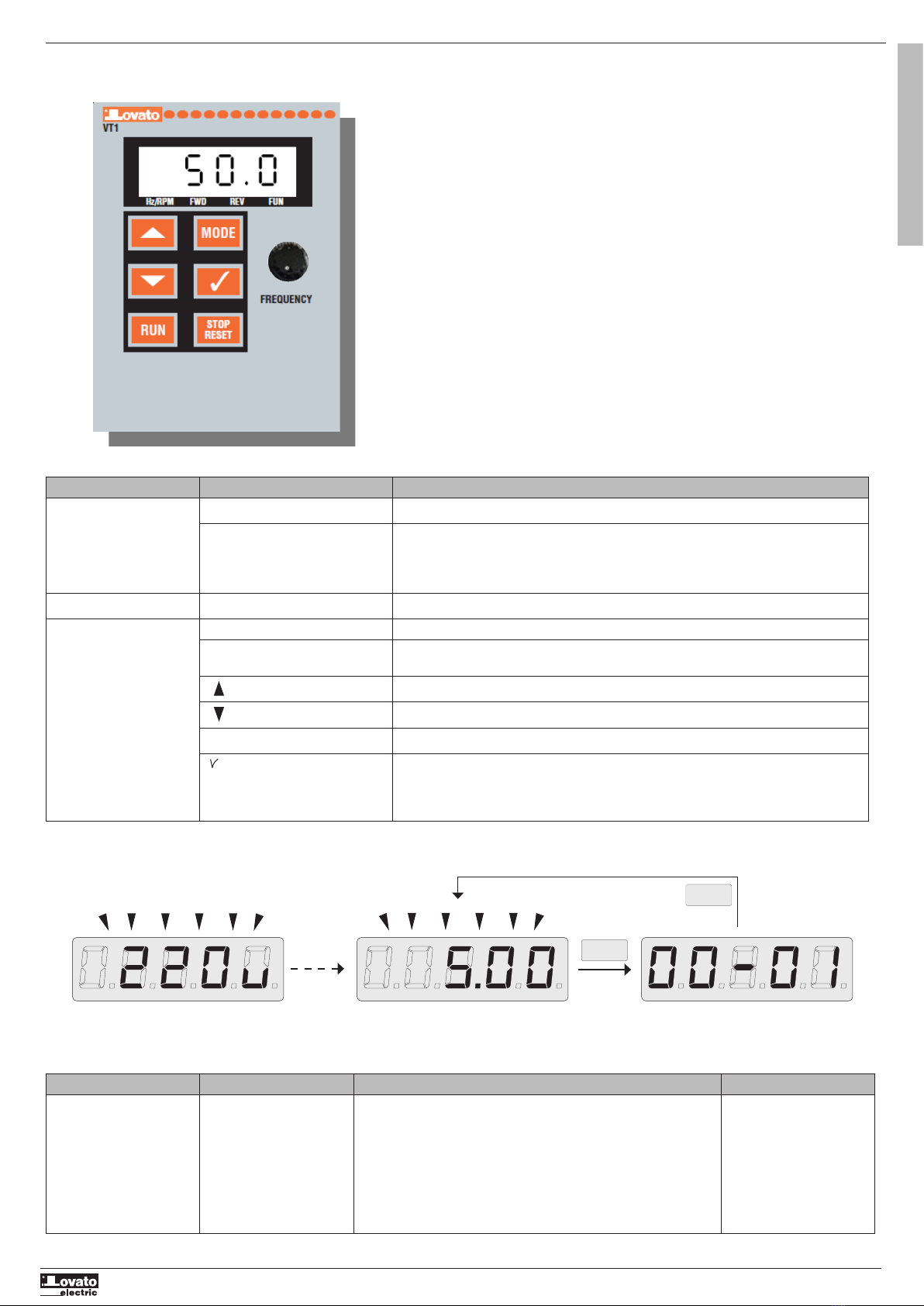
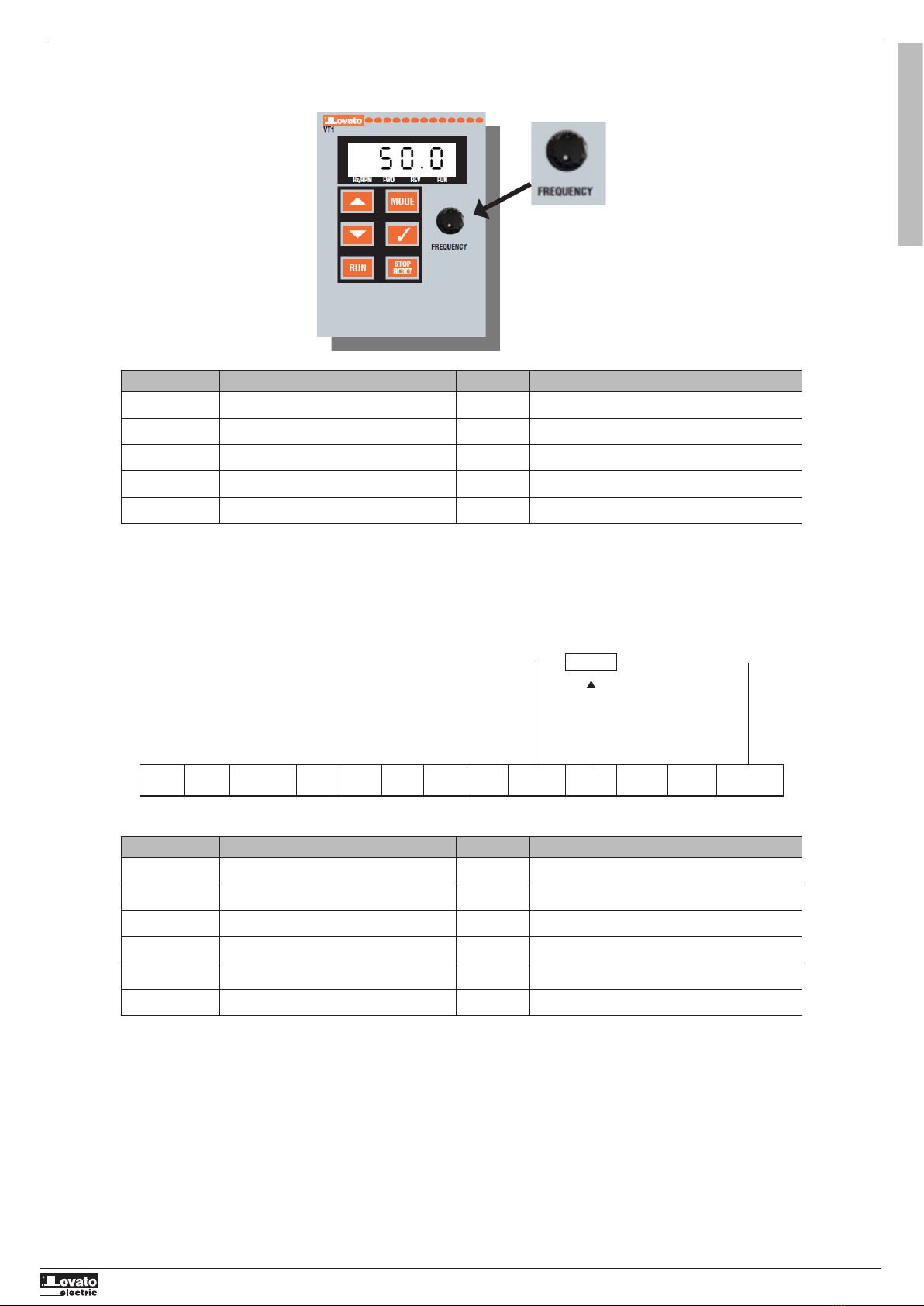
VT1...
GB
G
B
WARNING!
– Carefully read the manual before the installation or use.
– This equipment is to be installed by qualified personnel, complying to current standards, to avoid
damages or safety hazards.
– Before any maintenance operation on the device, remove all the voltages from measuring and supply inpu
and short-circuit the CT input terminals.
– The manufacturer cannot be held responsible for electrical safety in case of improper use of the equipment.
– Products illustrated herein are subject to alteration and changes without prior notice. Technical data and
descriptions in the documentation are accurate, to the best of our knowledge, but no liabilities for errors,
omissions or contingencies arising there from are accepted.
– A circuit breaker must be included in the electrical installation of the building. It must be installed close by
the equipment and within easy reach of the operator. It must be marked as the disconnecting device of the
equipment: IEC /EN/BS 61010-1 § 6.11.3.1.
– Clean the device with a soft dry cloth; do not use abrasives, liquid detergents or solvents.
ATTENTION !
– Lire attentivement le manuel avant toute utilisation et installation.
– Ces appareils doivent être installés par un personnel qualifié, conformément aux normes en vigueur
en matière d’installations, afin d’éviter de causer des dommages à des personnes ou choses.
– Avant toute intervention sur l’instrument, mettre les entrées de mesure et d’alimentation hors tension et
court-circuiter les transformateurs de courant.
– Le constructeur n’assume aucune responsabilité quant à la sécurité électrique en cas d’utilisation impropre
du dispositif.
– Les produits décrits dans ce document sont susceptibles d’évoluer ou de subir des modifications à n’importe
quel moment. Les descriptions et caractéristiques techniques du catalogue ne peuvent donc avoir aucune
valeur contractuelle.
– Un interrupteur ou disjoncteur doit être inclus dans l’installation électrique du bâtiment. Celui-ci doit se
trouver tout près de l’appareil et l’opérateur doit pouvoir y accéder facilement. Il doit être marqué comme le
dispositif d’interruption de l’appareil : IEC/ EN/BS 61010-1 § 6.11.3.1.
– Nettoyer l’appareil avec un chiffon doux, ne pas utiliser de produits abrasifs, détergents liquides ou solvants.
ACHTUNG!
– Dieses Handbuch vor Gebrauch und Installation aufmerksam lesen.
±=XU9HUPHLGXQJYRQ3HUVRQHQXQG6DFKVFKlGHQGUIHQGLHVH*HUlWHQXUYRQTXDOL¿]LHUWHP
Fachpersonal und unter Befolgung der einschlägigen Vorschriften installiert werden.
±9RUMHGHP(LQJULIIDP,QVWUXPHQWGLH6SDQQXQJV]XIXKU]XGHQ0HVVHLQJlQJHQWUHQQHQXQGGLH6WURPZDQGOHU
NXU]VFKOLHȕHQ
±%HL]ZHFNZLGULJHP*HEUDXFKGHU9RUULFKWXQJEHUQLPPWGHU+HUVWHOOHUNHLQH+DIWXQJIUGLHHOHNWULVFKH6LFKHUKHLW
±'LHLQGLHVHU%URVFKUHEHVFKULHEHQHQ3URGXNWHN|QQHQMHGHU]HLWZHLWHUHQWZLFNHOWXQGJHlQGHUWZHUGHQ'LHLP
Katalog enthaltenen Beschreibungen und Daten sind daher unverbindlich und ohne Gewähr.
±,QGLHHOHNWULVFKH$QODJHGHV*HElXGHVLVWHLQ$XVVFKDOWHURGHU7UHQQVFKDOWHUHLQ]XEDXHQ'LHVHUPXVVVLFKLQ
XQPLWWHOEDUHU1lKHGHV*HUlWVEH¿QGHQXQGYRP%HGLHQHUOHLFKW]XJlQJOLFKVHLQ(UPXVVDOV7UHQQYRUULFKWXQJIU
GDV*HUlWJHNHQQ]HLFKQHWVHLQ,(&(1/BS 61010-1 § 6.11.3.1.
– Das Gerät mit einem weichen Tuch reinigen, keine Scheuermittel, Flüssigreiniger oder Lösungsmittel verwenden.
ADVERTENCIA
-Leer atentamente el manual antes de instalar y utilizar el regulador.
-Este dispositivo debe ser instalado por personal cualificado conforme a la normativa de instalación
vigente a fin de evitar daños personales o materiales.
-Antes de realizar cualquier operación en el dispositivo, desconectar la corriente de las entradas de aliment
ción y medida, y cortocircuitar los transformadores de corriente.
-El fabricante no se responsabilizará de la seguridad eléctrica en caso de que el dispositivo no se utilice de
forma adecuada.
-Los productos descritos en este documento se pueden actualizar o modificar en cualquier momento. Por
consiguiente, las descripciones y los datos técnicos aquí contenidos no tienen valor contractual.
-La instalación eléctrica del edificio debe disponer de un interruptor o disyuntor. Éste debe encontrarse cerca
del dispositivo, en un lugar al que el usuario pueda acceder con facilidad. Además, debe llevar el mismo
marcado que el interruptor del dispositivo (IEC/ EN /BS 61010-1 § 6.11.3.1).
-Limpiar el dispositivo con un trapo suave; no utilizar productos abrasivos, detergentes líquidos ni disolventes
ni disolventes.
832=251ċ1Ë
±1iYRGVHSR]RUQČSURþWČWHQHå]DþQHWHUHJXOiWRULQVWDORYDWDSRXåtYDW
±7DWR]DĜt]HQtVPtLQVWDORYDWNYDOL¿NRYDQtSUDFRYQtFLYVRXODGXVSODWQêPLSĜHGSLV\DQRUPDPLSURSĜHGFKi]
Qt~UD]ĤRVREþLSRãNR]HQtYČFt
±3ĜHGMDNêPNROL]iVDKHPGRSĜtVWURMHRGSRMWHPČĜLFtDQDSiMHFtYVWXS\RGQDSČWtD]NUDWXMWHWUDQVIRUPiWRU\SURXGX
±9êUREFHQHQHVHRGSRYČGQRVW]DHOHNWULFNRXEH]SHþQRVWYSĜtSDGČQHYKRGQpKRSRXåtYiQtUHJXOiWRUX
±9êUREN\SRSVDQpYWRPWRGRNXPHQWXPRKRXNG\NROLSURMtW~SUDYDPLþLGDOãtPYêYRMHP3RSLV\D~GDMHXYHGHQpY
NDWDORJXQHPDMtSURWRåiGQRXVPOXYQtKRGQRWX
±6StQDþþLRGSRMRYDþMHQXWQR]DEXGRYDWGRHOHNWULFNpKRUR]YRGXYEXGRYČ0XVHMtEêWQDLQVWDORYDQpYWČVQpEOt]NRVWL
SĜtVWURMHDVQDGQRGRVWXSQpSUDFRYQtNXREVOXK\-HQXWQRKRR]QDþLWMDNRY\StQDFt]DĜt]HQtSĜtVWURMH,(&(1/BS
61010-1
§ 6.11.3.1.
±3ĜtVWURMþLVWČWHPČNNRXXWČUNRXQHSRXåtYHMWHDEUD]LYQtSURGXNW\WHNXWiþLVWLGODþLUR]SRXãWČGOD
AVERTIZARE!
±&LWLĠLFXDWHQĠLHPDQXDOXOvQDLQWHGHLQVWDODUHVDXXWLOL]DUH
±$FHVWHFKLSDPHQWYD¿LQVWDODWGHSHUVRQDOFDOL¿FDWvQFRQIRUPLWDWHFXVWDQGDUGHOHDFWXDOHSHQWUXDHYLWD
GHWHULRUăULVDXSHULFROHOH
±ÌQDLQWHGHHIHFWXDUHDRULFăUHLRSHUDĠLXQLGHvQWUHĠLQHUHDVXSUDGLVSR]LWLYXOXLvQGHSăUWDĠLWRDWHWHQVLXQLOHGHODLQWUăULOH
GHPăVXUDUHúLGHDOLPHQWDUHúLVFXUWFLUFXLWDĠLERUQHOHGHLQWUDUH&7
±3URGXFăWRUXOQXSRDWH¿FRQVLGHUDWUHVSRQVDELOSHQWUXVLJXUDQĠDHOHFWULFăvQFD]GHXWLOL]DUHLQFRUHFWăDHFKLSDPHQ
tului.
±3URGXVHOHLOXVWUDWHvQSUH]HQWXOVXQWVXSXVHPRGL¿FăULORUúLVFKLPEăULORUIăUăQRWL¿FDUHDQWHULRDUă'DWHOHWHKQLFHúL
GHVFULHULOHGLQGRFXPHQWDĠLHVXQWSUHFLVHvQPăVXUDFXQRúWLQĠHORUQRDVWUHGDUQXVHDFFHSWăQLFLRUăVSXQGHUHSHQWUX
HURULOHRPLWHULOHVDXHYHQLPHQWHOHQHSUHYă]XWHFDUHDSDUFDXUPDUHDDFHVWRUD
±7UHEXLHLQFOXVXQGLVMXQFWRUvQLQVWDODĠLDHOHFWULFăDFOăGLULL$FHVWDWUHEXLHLQVWDODWDSURDSHGHHFKLSDPHQWúLvQWUR
]RQăXúRUDFFHVLELOăRSHUDWRUXOXL$FHVWDWUHEXLHPDUFDWFD¿LQGGLVSR]LWLYXOGHGHFRQHFWDUHDOHFKLSDPHQWXOXL
,(&(1/BS 61010-1 § 6.11.3.1.
±&XUăĠDĠLLQVWUXPHQWXOFXXQPDWHULDOWH[WLOPRDOHúLXVFDWQXXWLOL]DĠLVXEVWDQĠHDEUD]LYHGHWHUJHQĠLOLFKL]LVDXVROYHQĠL
ATTENZIONE!
– Leggere attentamente il manuale prima dell’utilizzo e l’installazione.
– Questi apparecchi devono essere installati da personale qualificato, nel rispetto delle vigenti
normative impiantistiche, allo scopo di evitare danni a persone o cose.
– Prima di qualsiasi intervento sullo strumento, togliere tensione dagli ingressi di misura e di alimentazione e
cortocircuitare i trasformatori di corrente.
– Il costruttore non si assume responsabilità in merito alla sicurezza elettrica in caso di utilizzo improprio del
dispositivo.
– I prodotti descritti in questo documento sono suscettibili in qualsiasi momento di evoluzioni o di modifiche.
Le descrizioni ed i dati a catalogo non possono pertanto avere alcun valore contrattuale.
– Un interruttore o disgiuntore va compreso nell’impianto elettrico dell’edificio. Esso deve trovarsi in stretta
vicinanza dell’apparecchio ed essere facilmente raggiungibile da parte dell’operatore. Deve essere marchiato
come il dispositivo di interruzione dell’apparecchio: IEC/EN/BS 61010-1 § 6.11.3.1.
– Pulire l’apparecchio con panno morbido, non usare prodotti abrasivi, detergenti liquidi o solventi.
UWAGA!
±3U]HGXĪ\FLHPLLQVWDODFMąXU]ąG]HQLDQDOHĪ\XZDĪQLHSU]HF]\WDüQLQLHMV]ąLQVWUXNFMĊ
±:FHOXXQLNQLĊFLDREUDĪHĔRVyEOXEXV]NRG]HQLDPLHQLDWHJRW\SXXU]ąG]HQLDPXV]ąE\üLQVWDORZDQHSU]H]
Z\NZDOL¿NRZDQ\SHUVRQHO]JRGQLH]RERZLą]XMąF\PLSU]HSLVDPL
±3U]HGUR]SRF]ĊFLHPMDNLFKNROZLHNSUDFQDXU]ąG]HQLXQDOHĪ\RGáąF]\üQDSLĊFLHRGZHMĞüSRPLDURZ\FKL]DVLODQLDRUD]
]HZU]Hü]DFLVNLSU]HNáDGQLNDSUąGRZHJR
±3URGXFHQWQLHSU]\MPXMHQDVLHELHRGSRZLHG]LDOQRĞFL]DEH]SLHF]HĔVWZRHOHNWU\F]QHZSU]\SDGNXQLHZáDĞFLZHJR
XĪ\WNRZDQLDXU]ąG]HQLD
±3URGXNW\RSLVDQHZQLQLHMV]\PGRNXPHQFLHPRJąE\üZNDĪGHMFKZLOLXGRVNRQDORQHOXE]PRG\¿NRZDQH2SLV\RUD]
GDQHNDWDORJRZHQLHPRJąPLHüZ]ZLą]NX]W\PĪDGQHMZDUWRĞFLXPRZQHM
±:LQVWDODFMLHOHNWU\F]QHMEXG\QNXQDOHĪ\XZ]JOĊGQLüSU]HáąF]QLNOXEZ\áąF]QLNDXWRPDW\F]Q\3RZLQLHQRQ]QDMGRZDü
VLĊZEOLVNLPVąVLHG]WZLHXU]ąG]HQLDLE\üáDWZRRVLąJDOQ\SU]H]RSHUDWRUD0XVLE\üR]QDF]RQ\MDNRXU]ąG]HQLH
VáXĪąFHGRZ\áąF]DQLDXU]ąG]HQLD,(&(1/BS 61010-1 § 6.11.3.1.
±8U]ąG]HQLHQDOHĪ\F]\ĞFLüPLĊNNąV]PDWNąQLHVWRVRZDüĞURGNRZĞFLHUQ\FKSá\QQ\FKGHWHUJHQWRZOXEUR]SXV]F]D
nikow.
ɉɊȿȾɍɉɊȿɀȾȿɇɂȿ
±ɉɪɟɠɞɟɱɟɦɩɪɢɫɬɭɩɚɬɶɤɦɨɧɬɚɠɭɢɥɢɷɤɫɩɥɭɚɬɚɰɢɢɭɫɬɪɨɣɫɬɜɚɜɧɢɦɚɬɟɥɶɧɨɨɡɧɚɤɨɦɶɬɟɫɶɫ
ɨɞɟɪɠɚɧɢɟɦɧɚɫɬɨɹɳɟɝɨɪɭɤɨɜɨɞɫɬɜɚ
±ȼɨɢɡɛɟɠɚɧɢɟɬɪɚɜɦɢɥɢɦɚɬɟɪɢɚɥɶɧɨɝɨɭɳɟɪɛɚɦɨɧɬɚɠɞɨɥɠɟɧɫɭɳɟɫɬɜɥɹɬɶɫɹɬɨɥɶɤɨɤɜɚɥɢɮɢɰɢɪɨɜɚɧɧɵɦ
ɩɟɪɫɨɧɚɥɨɦɜɫɨɨɬɜɟɬɫɬɜɢɢɫɞɟɣɫɬɜɭɸɳɢɦɢɧɨɪɦɚɬɢɜɚɦɢ
±ɉɟɪɟɞɩɪɨɜɟɞɟɧɢɟɦɥɸɛɵɯɪɚɛɨɬɩɨɬɟɯɧɢɱɟɫɤɨɦɭɨɛɫɥɭɠɢɜɚɧɢɸɭɫɬɪɨɣɫɬɜɚɧɟɨɛɯɨɞɢɦɨɨɛɟɫɬɨɱɢɬɶɜɫɟ
ɢɡɦɟɪɢɬɟɥɶɧɵɟɢɩɢɬɚɸɳɢɟɜɯɨɞɧɵɟɤɨɧɬɚɤɬɵɚɬɚɤɠɟɡɚɦɤɧɭɬɶɧɚɤɨɪɨɬɤɨɜɯɨɞɧɵɟɤɨɧɬɚɤɬɵɬɪɚɧɫɮɨɪɦɚɬɨɪɚ
ɬɨɤɚɌɌ
±ɉɪɨɢɡɜɨɞɢɬɟɥɶɧɟɧɟɫɟɬɨɬɜɟɬɫɬɜɟɧɧɨɫɬɶɡɚɨɛɟɫɩɟɱɟɧɢɟɷɥɟɤɬɪɨɛɟɡɨɩɚɫɧɨɫɬɢɜɫɥɭɱɚɟɧɟɧɚɞɥɟɠɚɳɟɝɨ
ɢɫɩɨɥɶɡɨɜɚɧɢɹɭɫɬɪɨɣɫɬɜɚ
±ɂɡɞɟɥɢɹɨɩɢɫɚɧɧɵɟɜɧɚɫɬɨɹɳɟɦɞɨɤɭɦɟɧɬɟɜɥɸɛɨɣɦɨɦɟɧɬɦɨɝɭɬɩɨɞɜɟɪɝɧɭɬɶɫɹɢɡɦɟɧɟɧɢɹɦɢɥɢ
ɭɫɨɜɟɪɲɟɧɫɬɜɨɜɚɧɢɹɦɉɨɷɬɨɦɭɤɚɬɚɥɨɠɧɵɟɞɚɧɧɵɟɢɨɩɢɫɚɧɢɹɧɟɦɨɝɭɬɪɚɫɫɦɚɬɪɢɜɚɬɶɫɹɤɚɤɞɟɣɫɬɜɢɬɟɥɶɧɵɟ
ɫɬɨɱɤɢɡɪɟɧɢɹɤɨɧɬɪɚɤɬɨɜ
±ɗɥɟɤɬɪɢɱɟɫɤɚɹɫɟɬɶɡɞɚɧɢɹɞɨɥɠɧɚɛɵɬɶɨɫɧɚɳɟɧɚɚɜɬɨɦɚɬɢɱɟɫɤɢɦɜɵɤɥɸɱɚɬɟɥɟɦɤɨɬɨɪɵɣɞɨɥɠɟɧɛɵɬɶ
ɪɚɫɩɨɥɨɠɟɧɜɛɥɢɡɢɨɛɨɪɭɞɨɜɚɧɢɹɜɩɪɟɞɟɥɚɯɞɨɫɬɭɩɚɨɩɟɪɚɬɨɪɚȺɜɬɨɦɚɬɢɱɟɫɤɢɣɜɵɤɥɸɱɚɬɟɥɶɞɨɥɠɟɧɛɵɬɶ
ɩɪɨɦɚɪɤɢɪɨɜɚɧɤɚɤɨɬɤɥɸɱɚɸɳɟɟɭɫɬɪɨɣɫɬɜɨɨɛɨɪɭɞɨɜɚɧɢɹ,(&(1/BS 61010-1 § 6.11.3.1.
±Ɉɱɢɫɬɤɭɭɫɬɪɨɣɫɬɜɚɩɪɨɢɡɜɨɞɢɬɶɫɩɨɦɨɳɶɸɦɹɝɤɨɣɫɭɯɨɣɬɤɚɧɢɛɟɡɩɪɢɦɟɧɟɧɢɹɚɛɪɚɡɢɜɧɵɯɦɚɬɟɪɢɚɥɨɜ
ɠɢɞɤɢɯɦɨɸɳɢɯɫɪɟɞɫɬɜɢɥɢɪɚɫɬɜɨɪɢɬɟɥɟɣ
'ø..$7
±0RQWDMYHNXOODQÕPGDQ|QFHEXHONLWDEÕQÕGLNNDWOLFHRNX\XQX]
±%XDSDUDWODUNLúLOHUHYH\DQHVQHOHUH]DUDUYHUPHLKWLPDOLQHNDUúÕ\UUONWHRODQVLVWHPNXUPDQRUPODUÕQD
J|UHNDOL¿\HSHUVRQHOWDUDIÕQGDQPRQWHHGLOPHOLGLUOHU
±$SDUDWDFLKD]KHUKDQJLELUPGDKDOHGHEXOXQPDGDQ|QFH|OoPJLULúOHULQGHNLJHULOLPLNHVLSDNÕPWUDQVIRUPDW|UOHUL
HGHNÕVDGHYUH\DSWÕUÕQÕ]
±hUHWLFLDSDUDWÕQKDWDOÕNXOODQÕPÕQGDQND\QDNODQDQHOHNWULNVHOJYHQOL÷HDLWVRUXPOXOXNNDEXOHWPH]
±%XGRNPDQGDWDULIHGLOHQUQOHUKHUDQHYULPOHUHYH\DGH÷LúLPOHUHDoÕNWÕU%XVHEHSOHNDWDORJGDNLWDULIYHGH÷HUOHU
KHUKDQJLELUED÷OD\ÕFÕGH÷HULKDL]GH÷LOGLU
±%LQDQÕQHOHNWULNVLVWHPLQGHELUDQDKWDUYH\DúDOWHUEXOXQPDOÕGÕU%XDQDKWDUYH\DúDOWHURSHUDW|UQNROD\OÕNODXODúD
LOHFH÷L\DNÕQELU\HUGHROPDOÕGÕU$SDUDWÕFLKD]GHYUHGHQoÕNDUWPDJ|UHYL\DSDQEXDQDKWDUYH\DúDOWHULQPDUNDVÕ
,(&(1/BS 61010-1 § 6.11.3.1.
±$SDUDWÕFLKD]VÕYÕGHWHUMDQYH\DVROYHQWNXOODQDUDN\XPXúDNELUEH]LOHVLOLQL]DúÕQGÕUÕFÕWHPL]OLNUQOHULNXOODQPD\ÕQÕ]
1
31100502I666 GB 06 21