Puhui MT-602 User manual

MT-602
User manual
Auto Chip Mounter
Taian Puhui Electric Technology Co., Ltd
Http://www.tech168.cn

MT-602 user manual
1/ 32
Instruction ofinstallation and commissioning
Introduce of machine
一、 machine parameters
Item
specification
product name
auto-mounter machine
product type
MT-602
mounting head
double mounting head
average speed
5000CPH
positioning accuracy
0. 025mm
net weight
151kg
applicable elements
0603-1206 SMD transistors, diodes, capacitors, resistors, chips, etc.
number of rack
56:8mm=50,12mm=4,16mm=2
Number of offline storage files
20
max size of circuit board
300mm×400mm
power supply
220V,50/60Hz,280W
vacuum gas source
-50Kpa,13L/min
operating system
Windows
installation dimension W×D×H
1396*761*480
Number of vacuum pump
2
Number of pump
1
malfunction detection
Suction leak detection, pressure detection
二、 appearance of the machine and basic structure

MT-602 user manual
2/ 32
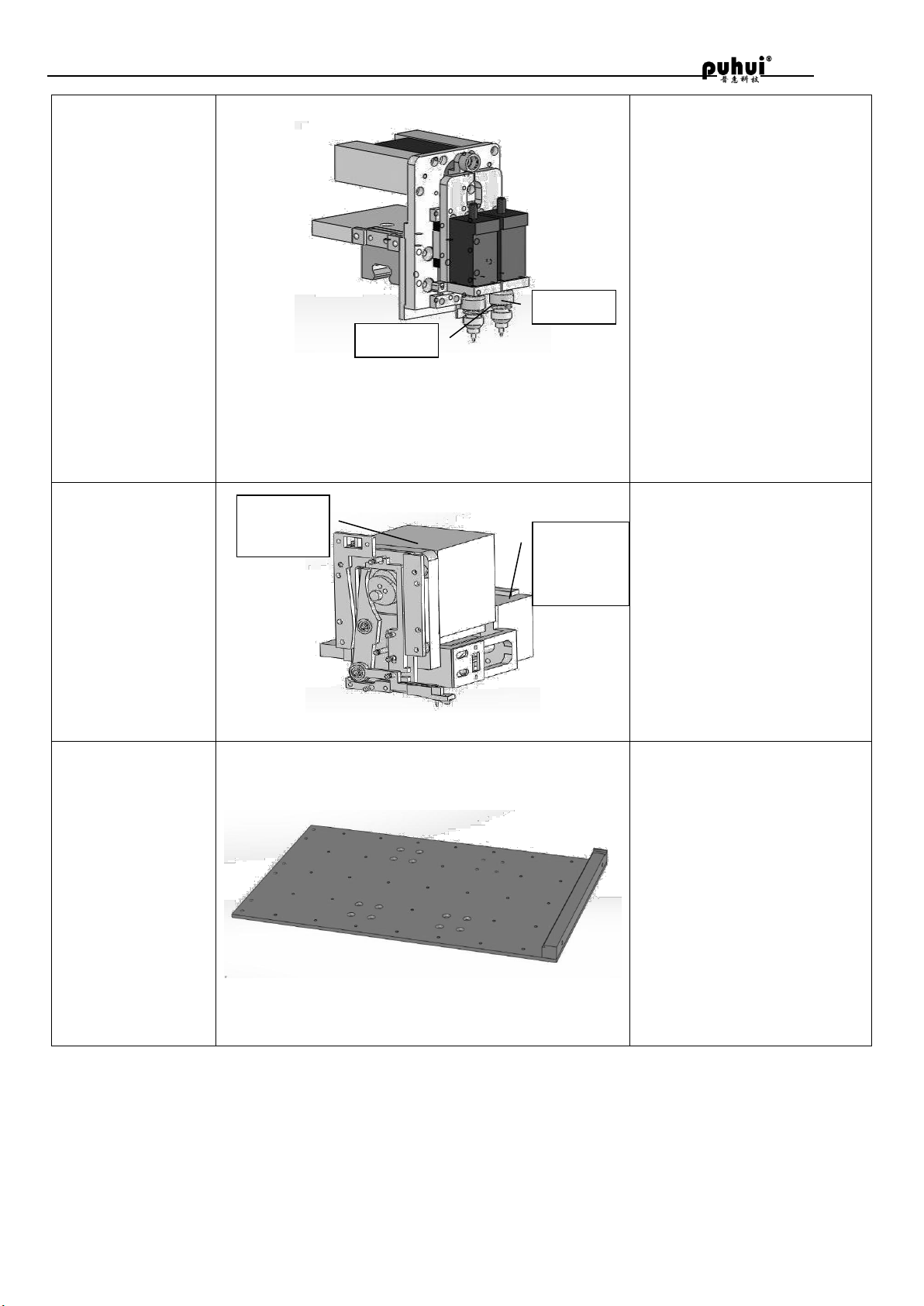
三、 Main Institutions
Y-axis motion
components
1, Y-axis plate
2, linear bearings supporting
base
3, linear bearings LM25UU
4, Y synchronous wheel
mounts
5, Y synchronous wheel
6, Y-axis motor mount
7, large X-axis belt fixed tooth
plate
8, shaft belt adjustment block
9, large X-axis belt adjustment
block briquetting
F608ZZ flange bearings
Emergency
stop switch
Suction
mechanism
Pusher
mechanism
Tray moving
mechanism
Feed tray
rack
Operation
panel
Y-axis motion
components
Power
switch
Take belt
mechanis
m
Rack shaft Motion
components
power
interface
USB
interface
MT-602 user manual
3/ 32
Suction
mechanism
1, the vacuum solenoid valve
2, linear slide MGN9C
3, Z-axis limit switch
4, pick-and-place the drive
motor Z
5, the rotary drive motor Q1,
Q2
6, a nozzle, the nozzle
assembly 2
7, Z-axis suction mounting
plate
8, Y-axis slide mechanism
connecting plate suction
9, Y-axis belt tensioning block
10, Y-axis belt tooth plate
11, motor angle slider stopper
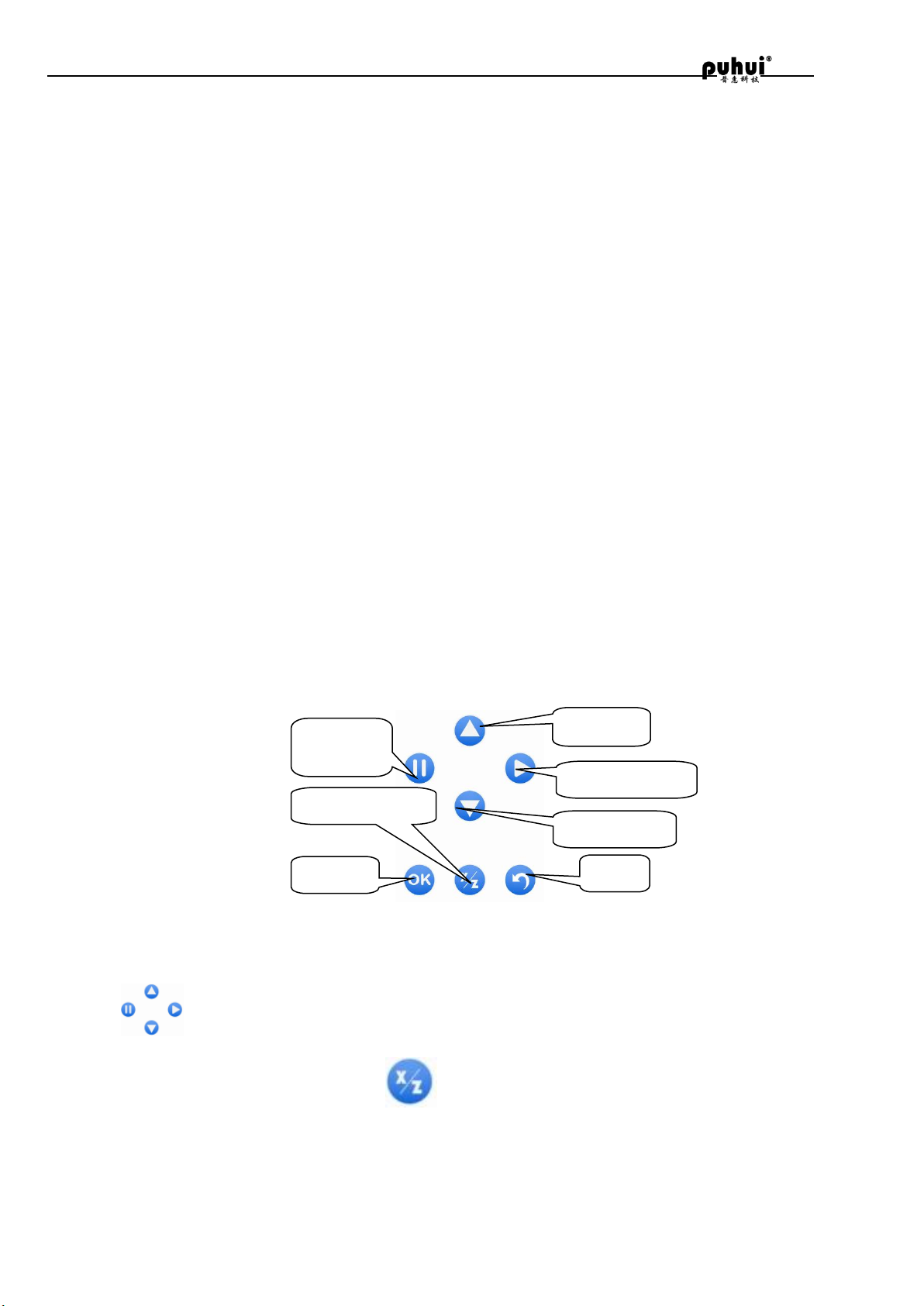
Pusher
mechanism
1, the pusher motor
2, the pusher cam mechanism
component
3, T limit switch
4, the pusher pin
5, the pusher adjustment motor
6, pusher holder
7, pusher slider
Tray moving
mechanism
1,470X300 tray
2, the slider tray
3, the tray belt fixing plate
4, linear slide SBR16UU
5, slider slider
6, the right tray stopper
7. Fixed slider block
Nozzle1
Nozzle2
2
Pusher
motor
Pusher
adjustment
motor

MT-602 user manual
4/ 32
Waste recovery
mechanism
1, closing with gear box
2, the take-up gear assembly
3, take-up motor
4, the take-up motor drive
circuit board
Feed tray
1, tray holder
2, pin for tray
3, waste recycling gear
4, the guide wheel
Rack
1、patch wedge
2、pressing reed
3、discharge pressure bar
Preparation and installation
1. Preparation and Precaution of installing
(1)Preparation of installing
1. Choose a flat ground to ensure that the machine level
2. Choose firm placement platform to ensure that the machine can not move.
3. Enough space for production operations.
4. Avoid hot and humid environment.
5. Check the power cable if there is breakage.
(2)Precaution for use
1. Electrical Considerations
Use a multimeter to check if the power supply voltage is correct and the connection is reliable.
Ensure that it is earth grounded safely.
Ensure that all hardware connections are secure.
2. Safety Precautions
Before moving the machine, turn the power off, unplug the power cord.
Pay attention to personal safety when transport.
Ensure there is no foreign matter inside of machine before electrifying.
MT-602 user manual
5/ 32
Before electrifying, manual confirmation of the agencies operating normally, without hindrance.
Press the red emergency stop switch, and the system power supply is disconnected when there is
emergency.
Installation of mounter
(1)Select the appropriate operating space for placing Mounter
(2)The SMT machine should be placed in a special support frame.
(3)The machine power should be accessed on the labeled INPUT socket.
Debugging Preparation
1. Safety tips of commissioning test
(1)All of components that are working should not be obstructed when operated.
(2)All of components that are working should not be pushed when stopped.
(3)Ensure that the terminal connection is well.
(4)Restart it after 20 seconds when cut off power.
(5)Press the red emergency stop switch and the system power supply is disconnected if there is emergency.
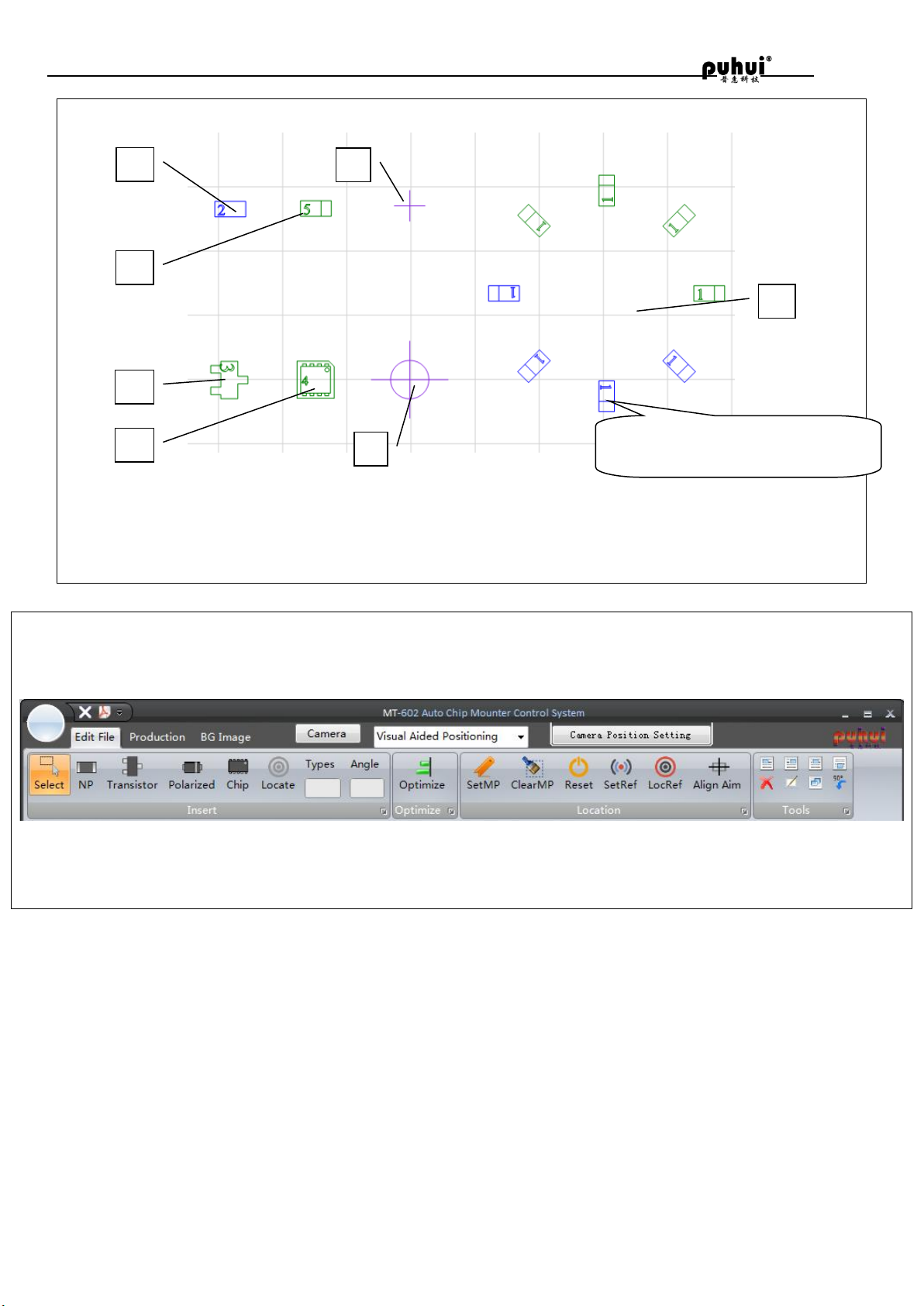
2. Introduce of operation panel
(1)Above panel
1. Emergency stop switch
Press this switch, power is cut off and all actions of mountor machine are stopped. Clockwise rotation,
button bounces and power is on, following that machine resets and each axis return to the original position.
(2)Main panel
1. LCD
2. Buttons
Description of function keys:
When the reference point to identify the state, it is used as the arrow key of mounting head to
control the moving of mounting head. When the reference point to identify the state, it is uesd for
controlling the nozzle’s up and down movement, while other states, functions as shown above picture.
(3)Side panels
1. Cooling fan outlet
2. Access outlet for main power
Cursor up
Back
Confirm
Mount Continue
Mount
pause
Cursor down
Tray in and oput
MT-602 user manual
6/ 32
3. Power switch
4. USB communication interface
3. Introduce of software interface
Main interface
Graphing area
Prompt area Status
information
Element list
Menu
Tab
Instructions
toolbar
MT-602 user manual
7/ 32
Graphical representation
1. No directional element graphical representation 2. Directional element graphical representation 3. Transistor
element 4. Graphical representation of chip components 5. Mark point marker graphic 6. Reference Point logo
graphic 7. Circular array
1
2
3
4
7
5
6
Blue elements using nozzle 1
Green software uses nozzle 2
MT-602 user manual
8/ 32
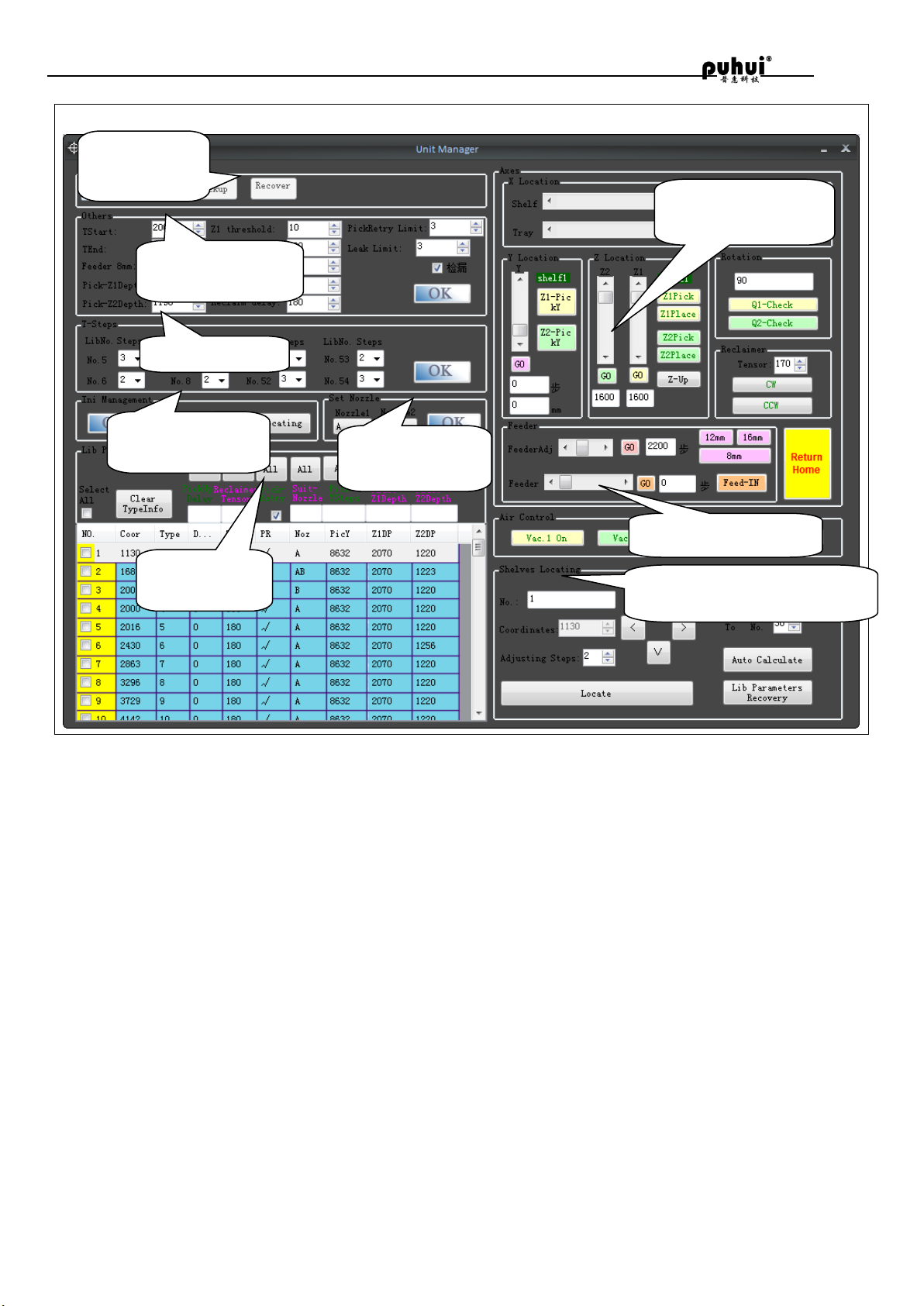
Parameter interface of equipment
Rack parameter
field
Backup and
recovery zone
Each axis positioning
zone
Rack coordinate adjustment
zone
Other parameters
zone
Pusher step zone
Pneumatic control zone
Rack management
zone
Current nozzle
settings area

MT-602 user manual
9/ 32
Interface of the device parameters
1. select all of rack 2. Empty rack model column 3. rack Number 4. device coordinates of rack 5. element
models of rack 6stay time on elements when picking element. 7. take-up tension of take-up belt 8. Whether
to check leak of rack element 9. The nozzle type that can be used on rack element. 10. device location
coordinates the feeder element Picking Y 11. Discharge depth of the rack-mount device application when the
nozzle 1, 12Discharge depth of the rack-mount device application when use nozzle 2, 13. Single rack selection
box
Blue area is
editable area
Gray areas is
non-editable
regions alone
yellow area is
current editing
area
2
1
3
5
4
6
7
8
9
10
11
12
Batch edit of
feeder parameters
13

MT-602 user manual
10 / 32
Paraments interface of the device
Rack coordinate coefficient correction: This
section generally do not need to change, but after
replacing a timing belt or adjust belt tightness
need to re-adjust
Mounter online port
selection
Communication baud rate
setting: Do not change this
MT-602 user manual
11 / 32
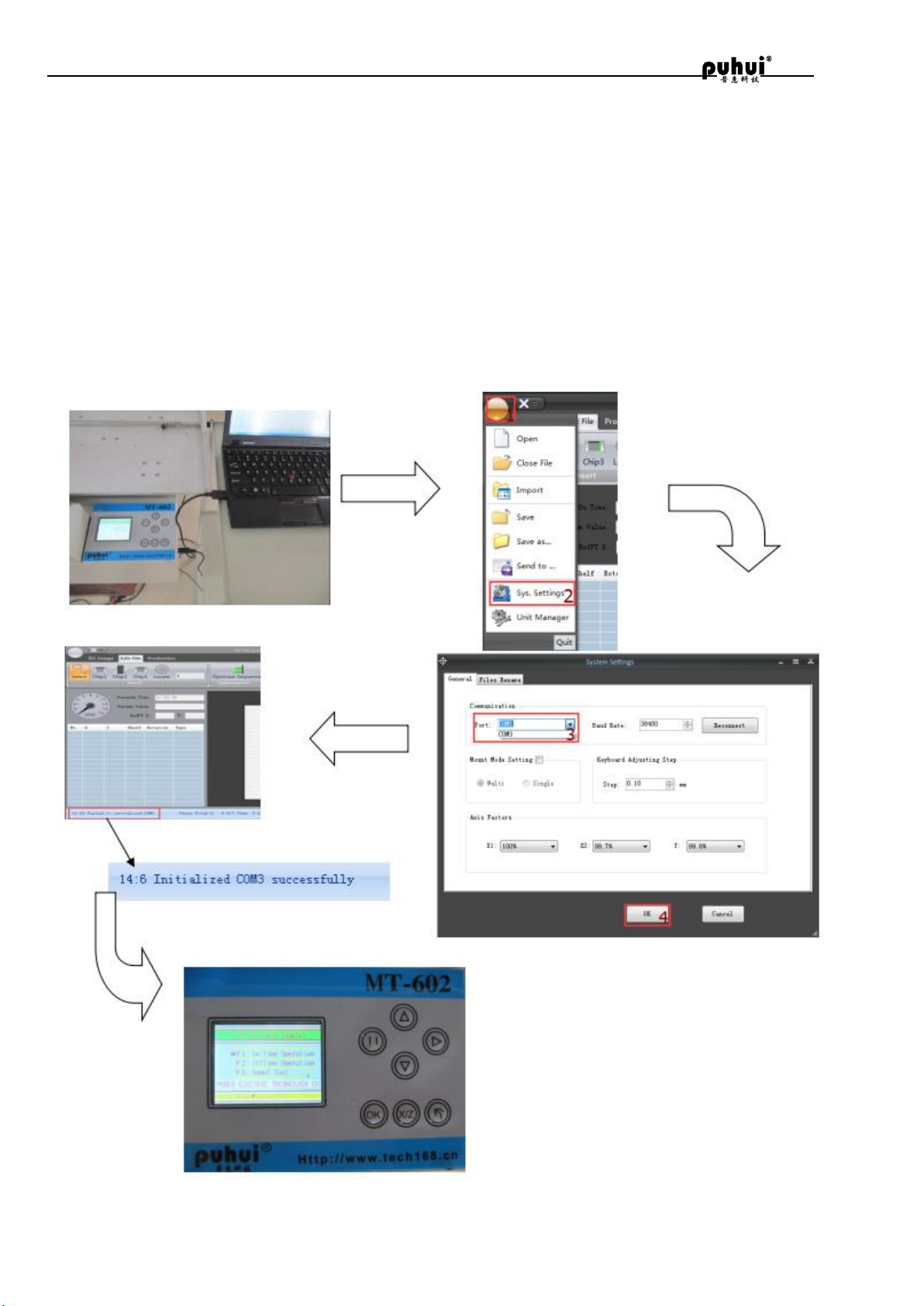
Operation instructions
Operation 1 —— Connect with computer
一、Connect MT-602 with computer by using USB wire,open the control software, turn on the
power of MT-60.
二、Click “main menu” - “system parameter, you will see “system parameter setting dialog box”,
click serial port, you will see the current name of the serial port.
三、Select the serial port which match with USB wire.
四、Click OK, you will see the notice information in the bottom left corner of page。
五、At this time, Press “OK” at MT-602 operation panel, start to connect with computer, it connect
successfully when MT-60 operation page show “already connected with computer”

MT-602 user manual
12 / 32
Operation 2 —— Parameter Adjustment
1. Install Feeders
Feeders NO 1-10 suit for diode, triode with plastic feeders. 31-34 suit for
12mm components,35-36 suit for 16mm components. The others suit for 8mm components.
2. Entry formation of feeders
(1). Click Main menu - Unit manager, entry the information of feeders.

MT-602 user manual
13 / 32
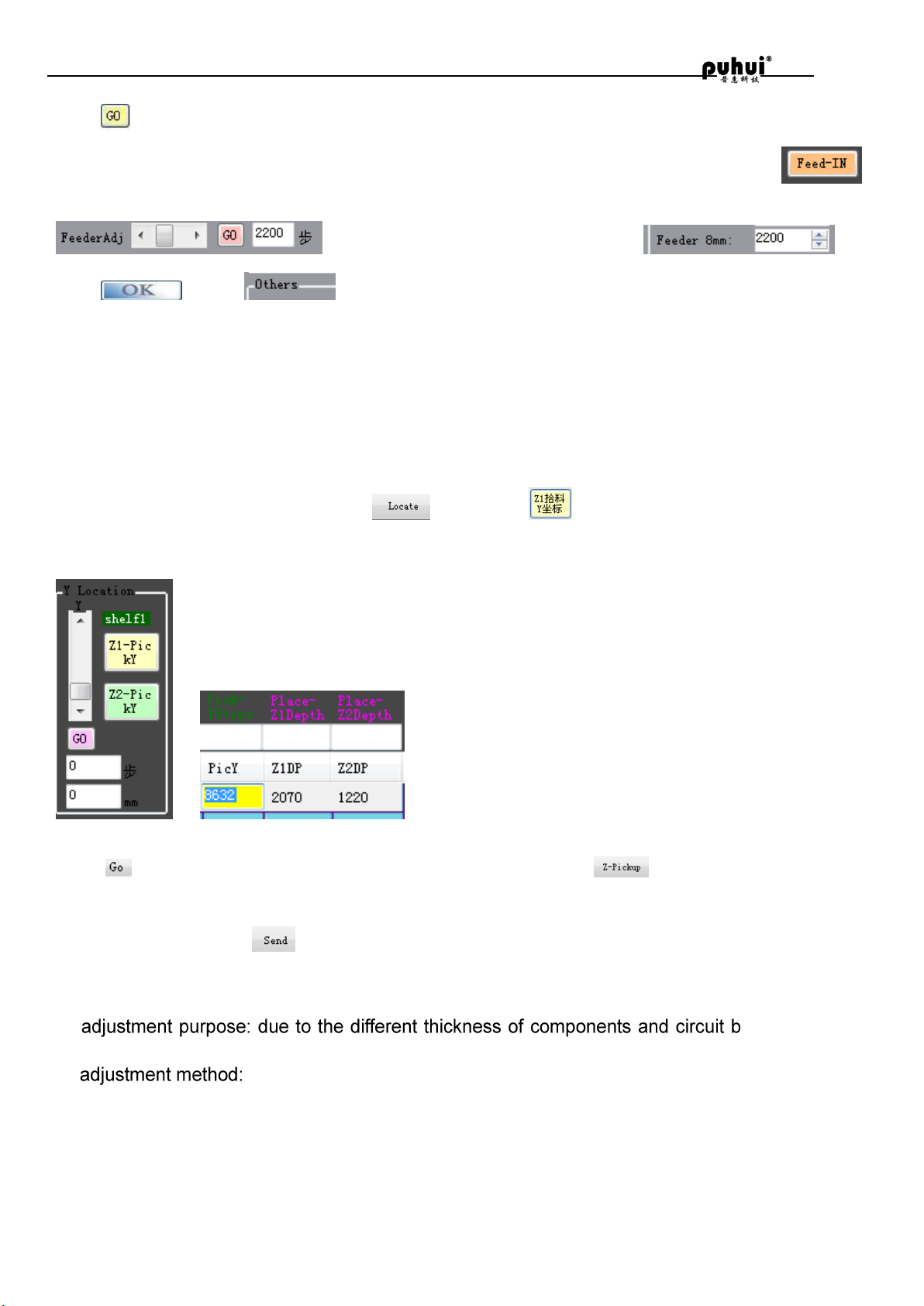
(2). Check feeders coordinate
Checking purpose: make nozzle locate in the middle of component between left and right.
Click “main menu” – “Unit manager”, click the number of checked feeder, click , the
nuzzle will move to the feeder, click and , check whether the nuzzle
locates in the middle of component. If not, click and , then click , click
again, the nuzzle wiil move the new coordinate, check again to confirm the position. Click
after adjusted.
(3). Check pick- Y steps
Checking purpose:make nozzle locate in the middle of component between before and after.
Select any a feeder number, click , then click to push a component, coil the skin
manually. Then copy the data of Y steps.
Click , the nuzzle will be moved over the component. Click , the nuzzle lands
on the component, check whether the nuzzle locates in the middle of component. Copy the
data to entry the pick Y steps. , click to save data.
MT-602 user manual
14 / 32
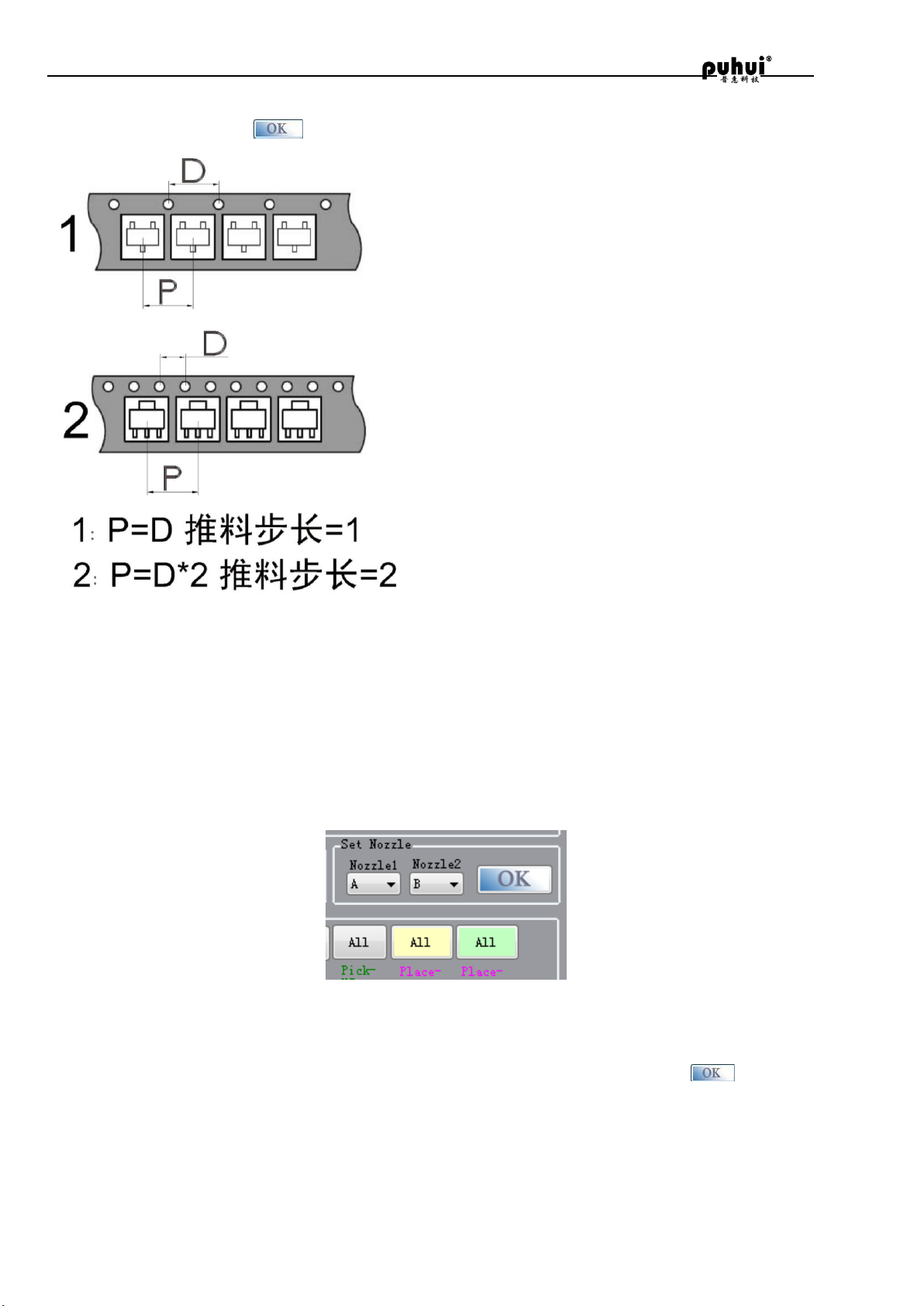
(4). In pushing step length, according to the no. 31 ~ 36 loading of material situation, set up
pushing step, click set after the completion of the pushing step to save data.
3. Suction nozzle setting
(1) The machine is equipped with five different specifications of the suction nozzle, specifications
and codes are: A inner diameter is 0. 6 mm, B inner diameter is 0. 8 mm, C inner diameter is 1. 2
mm, D inner diameter is 1. 5 mm, E inner diameter is 2. 5 mm. In order to realize the customer's
different specifications of the ideal of the patch SMT.
(2) Users choose to maximum meet all of the SMT components installed on the material shelf two
suction nozzle assembly requirements, installed on the suction nozzle 1, the suction nozzle 2.
(3) Click the main menu - equipment parameters - in the "current suction nozzle set" drop-down
menu Settings, such as, code-named B of suction nozzle is installed on the suction nozzle 1, as
shown below "suction nozzle 1" below the menu option "B", the same method for the suction nozzle
2 "Settings, set up is completed, click the current setting suction nozzle area save data.
(4) According to the material on the element size set the suction nozzle. Of no. 0603
components using A suction nozzle SMT, 0805 and 1206 components using A and B, suction
nozzle specifications for SMT, large size chip components suggest using D, E, suction nozzle for
SMT. All other components according to the size to choose suitable for placement of the suction
nozzle specifications.

MT-602 user manual
15 / 32
4. Parameter adjustment
(1) Coordinate correction and pick up material depth adjustment
▲ adjustment purpose: suction nozzle is located in the rack to head is the central element direction
and depth has the right to pick up.
▲adjustment method:
MT-602 user manual
16 / 32
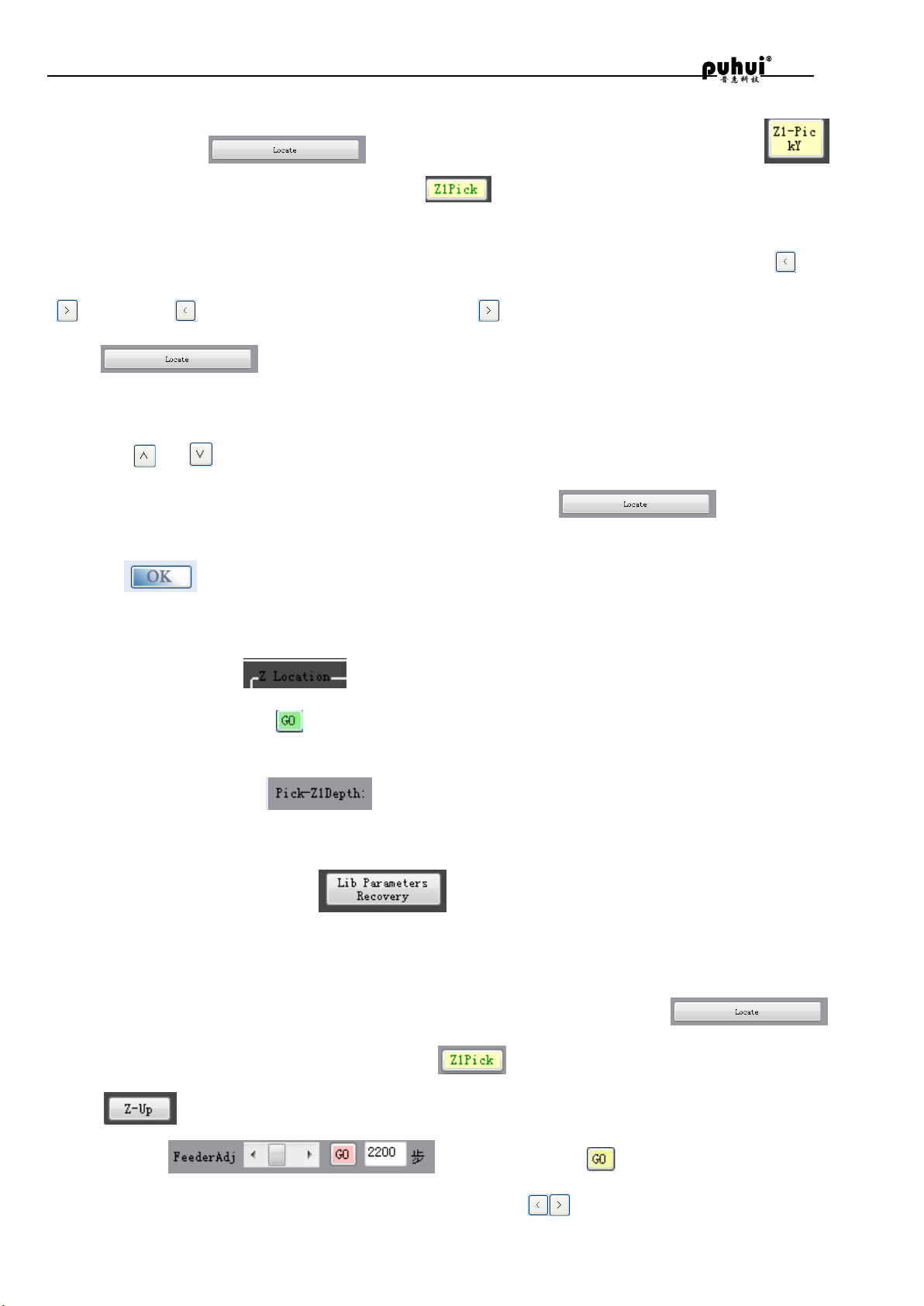
(1) In turn, click on the main menu - equipment parameters, the material parameter selection a
marking bar, click , suction nozzle 1 will be shifted to the rack, click ,
near the suction nozzle to the material, click on the suction nozzle 1 to fall on the
components, observe whether suction nozzle 1 is located in the center position of the element left
and right. If there is deviation, according to the migration direction and distance, click or
adjust (click , rack position shift to the left, click , rack position moves to the right). Then
click on the suction nozzle 1 will be moved to the new coordinates, repeating
observation adjustment, until the suction nozzle 1 is the central element is located in the left and
right.
(2) Click or button, will change the selected material (position number increased to shift to
the left, position number reduced to moves to the right), click , suction nozzle to
the material. Repeat the first step of the operation, until all rack position adjustment.
3, click on the material management, to save parameters are adjusted to the MT - 602
hosts.
4, watch suction nozzle in the above check Z1 falls on components, whether to have enough buffer.
If need to adjust, click on the main menu - equipment parameters, fine-tuning area Z1
slider and Z1 slider below , click to view at this time whether there is enough to the suction
nozzle on the element of the buffer, adjust the appropriate after copying the value in the text box
below the Z1 notification to the text box at the back, the same method to adjust Z2
found material depth (note: Z2 to pick up the smaller depth, said the whereabouts of suction nozzle
Z2 depth, the greater the Z1 pick up material depth, the greater the said Z1 falling depth is larger).
5, If parameter tuning out, press , material parameters all returned to the factory
settings.
(1) The adjustment of pushing mechanism
First in the material parameters of the bar, choose a 8 mm rack, then click ,
suction nozzle will be shifted to the rack, click
and , when the element suction nozzle 1 is located in the center of the left and right
position, slide the slider and click , pushing electric opportunity
to the slider move in the direction of the translation, click at the ends of the slider and then
MT-602 user manual
17 / 32
click on pushing the motor position fine-tuning, when pushing motor to pushing needle at strip
pushing round hole left and right in the middle of the position, stop the adjustment, click
right now, to see whether the normal launch patch element, adjust the value
in ideal will be copied into the text box ,
click in the to save data.
(2) Check pick - Y steps
Checking purpose:make nozzle locate in the middle of component between before and after.
Select any a feeder number, click , then click to push a component, coil the skin
manually. Then copy the data of Y steps.
Click , the nuzzle will be moved over the component. Click , the nuzzle lands on the
component, check whether the nuzzle locates in the middle of component. Copy the data to entry
the pick Y steps. , click to save data.
(3) the feeding depth adjustment Feeding depth of ±10 will have obvious change oard thickness,
adjust the that suction nozzle feeding with appropriate flexibility.
1, 11 ~ 30 rack and 37 ~ 56 material feeding depth adjustment Will be pasted on the circuit board
fixed on the tray, Y axis adjustment slider, X axis, the slider, the suction nozzle above 1 to circuit
board. Adjust the Z1 slider, suction nozzle 1 after falling and circuit board, the distance between 1
after falling to suction nozzle, it is advisable to contact with the circuit board just. Copy Z1 slider

MT-602 user manual
18 / 32
below the values in the text box, paste into the text box below and select material
to full box full frame materials, click on the button , the material of the Z1 feeding depth are
set to the values in the text box. To adjust the feeding Z2 depth in the same way.
In the no. 2, 1 ~ 10 aircraft and 31 ~ 36 material feeding depth adjustment
Rack and 31 1 ~ 10 ~ 36 rack for components have different thickness difference is bigger, so I
need a single material. Will be pasted on the circuit board fixed on the tray, will adjust the rack
components placed on the circuit board, Y axis adjustment slider, X axis, the slider, the suction
nozzle above 1 to components. Adjust the Z1 slider, observe the suction nozzle 1 after falling and
the distance between components, with suction nozzle 1 after falling, and element just slightly
elastic contact is advisable. Copy Z1 slider below the values in the text box, paste to the material
parameters of the area to adjust the material feeding Z1 bar text box. The same method to adjust
the other rack and Z2 feeding depth.
3, the same method to adjust the feeding Z2 depth. All after the adjustment, click on OK and save
material in the material parameter bar parameters.
(4) Suction nozzle MARK point coordinate difference calculation:
poses:
Computing suction nozzle 2 relative to the suction nozzle 1 place in the X direction and Y direction
deviation, so as to determine the suction nozzle device coordinates of 2.
1, have a small flag stop right at the tray.
2, open the placement machine control software, click edit graphics - click on the "1" suction nozzle,
the mouse moved to the lower right graph area, the cursor into a black cross style.
3, move the mouse or press the direction key (keyboard to adjust the interval is inversely
proportional to the magnification of the canvas, canvas magnification, the greater the keyboard
adjustment interval is smaller, the adjustment precision is higher. Sliding the mouse wheel to
zoom the canvas size), and makes the suction nozzle 1 corresponding move over the tray. Press
the space bar, SMT machine suction nozzle 1 will fall, loosen the blank space key and suction
nozzle 1 is raised.
4, use the mouse or the direction key to adjust the suction nozzle position, until the suction nozzle 1
center is for us to do MARK, press the Enter key, the cursor position MARK will appear blue cross
point MARK. At this point, "suction nozzle 1" behind the two text box will show the MARK point
coordinate values.
5, click on the "suction nozzle 2", the choice we make marked as benchmark, use the mouse or the
direction key to adjust the suction nozzle position 2, until the suction nozzle 2 center right we do
MARK in the block center, press the Enter key, the cursor position MARK will appear blue cross
point MARK. At this point, "suction nozzle 2" behind the two text box will show the MARK point
marker coordinates, press the ESC key to exit the MARK point positioning, suction nozzle 1 and
suction nozzle 2 X and Y direction coordinate difference value is automatically calculated and
displayed on the back of the two text box, click the "OK", transferred to the SMT machine.
(5) other material parameter adjustment:
MT-602 user manual
19 / 32
1, components are required when increasing material delay.
2, components of material coated hard to tear apart, tension, increase recovery of coated strip
break easily, reduce the tension of recycling.
Enable/disable 3, leak detection function.
4, adjust, click on the rack to save administrative zones
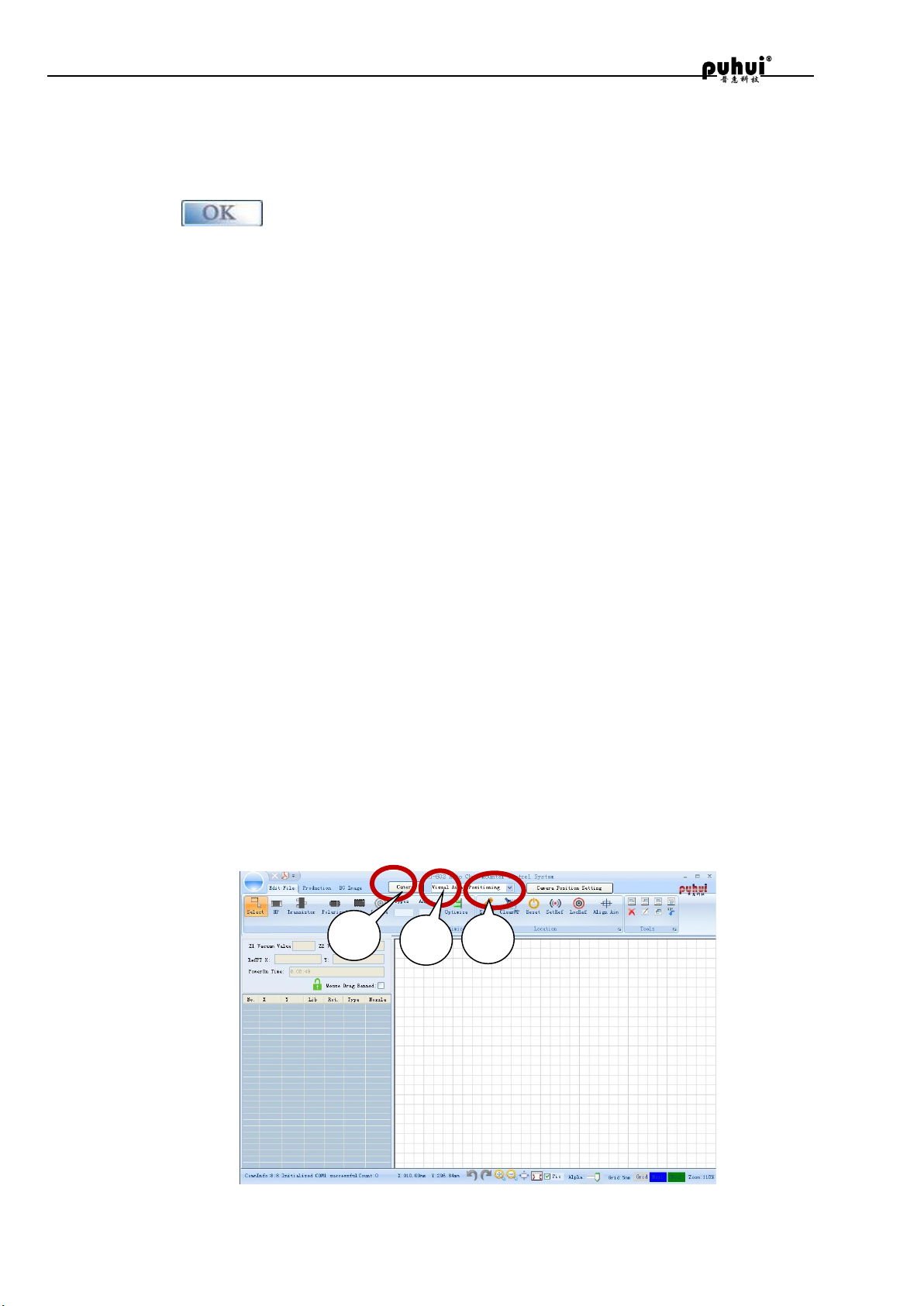
MT-602 visual aids
Main interface
1
3
2
Table of contents
Popular Lathe manuals by other brands

Robust
Robust Sweet Sixteen owner's manual

Sherline Products
Sherline Products 4410 operating instructions

Teknatool
Teknatool nova Neptune DVR Operation manual

Rikon Power Tools
Rikon Power Tools 70-1824VSR Operator's manual

Teknatool
Teknatool NOVA DVR SATURN instruction manual

Haas
Haas EC-1600 Technical documentation











