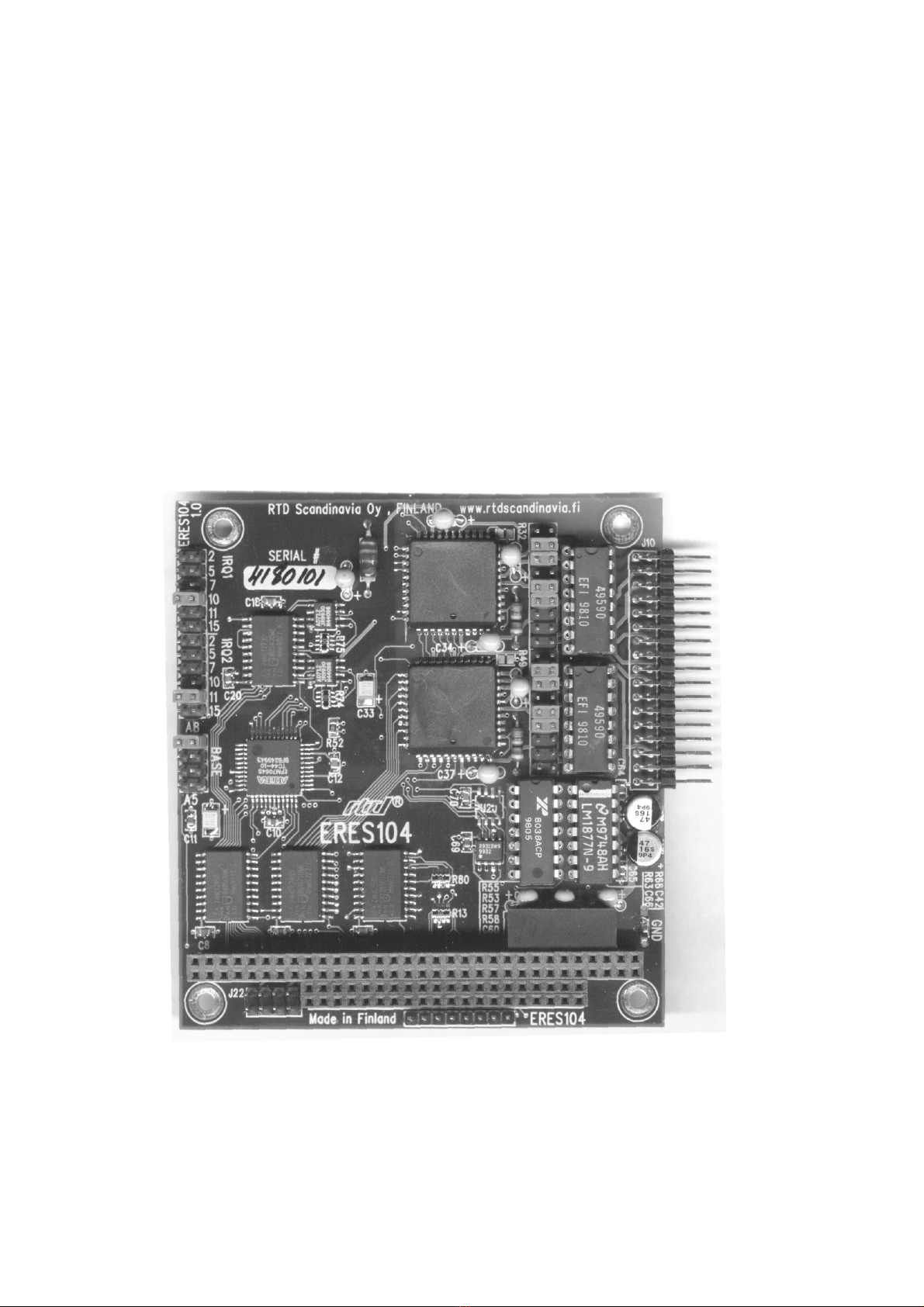
This user's manual describes the operation of the ERES104 2-channel PC/104
syncro/resolver subsystem.
Some of the key properties of the ERES104 include:
2 Independent Differential Syncro/Resolver/LVDT channels
Connection to 11.8V or 90V Syncros with onboard solid State Scott-T circuitry
Programmable sine wave excitation from 400Hz to 1.6KHz, global for both channels
Programmable resolution ranging from 10 to 16 bits
Error 8/4/2 minutes
Resolution 16-bits guaranteed with onboard reference source.
Fully PC/104 compliant
+5V only operation
The following paragraphs briefly describe the major features of the ERES104. A more
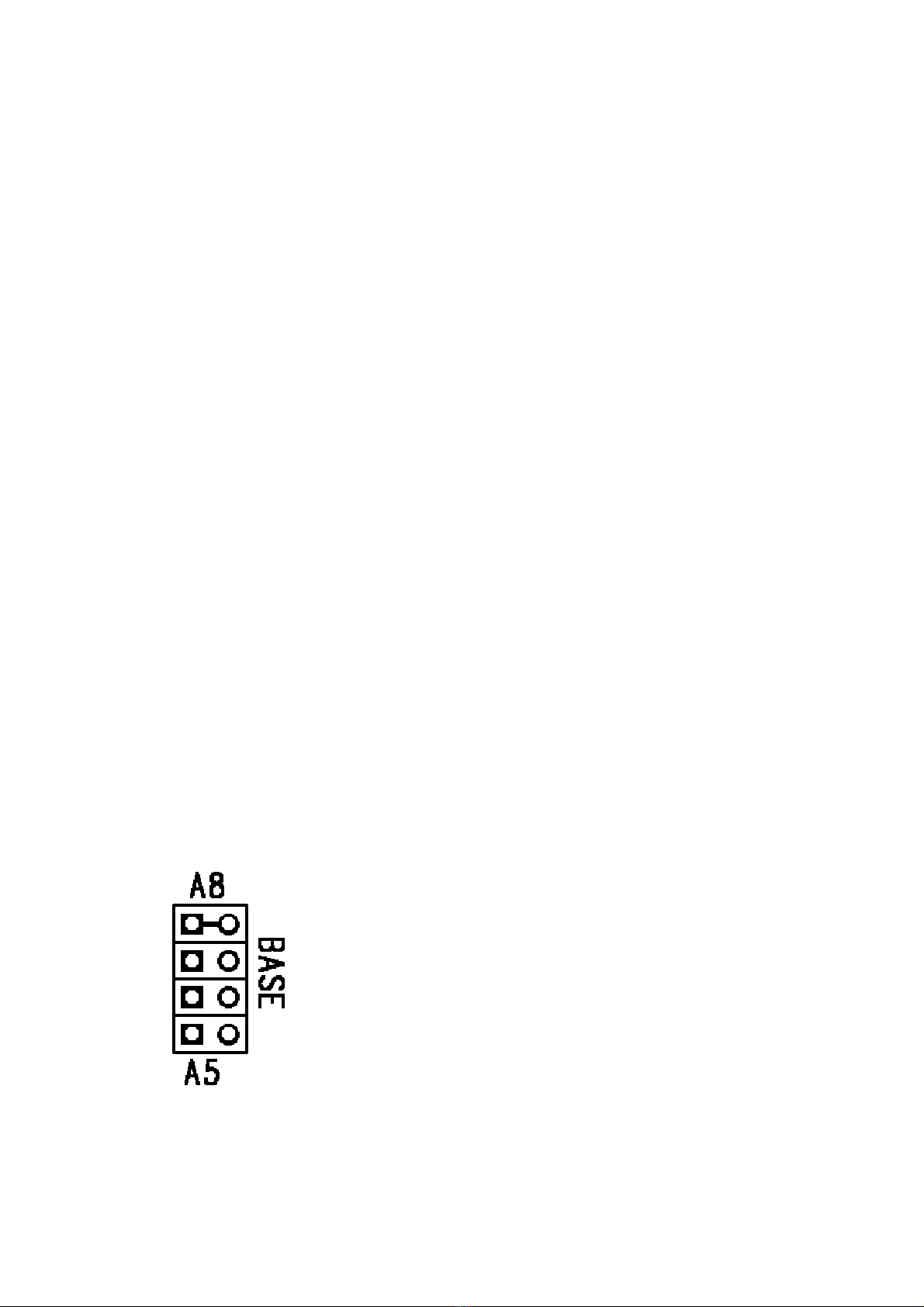
detailed discussion is included in Chapter 3 (Hardware description) The board settings are
described in Chapter 1 (Board settings).
Syncro/Resolver inputs
The ERES104 provides independently configurable input channels. Both
channels support Syncro, Resolver or LVDT interface. The voltage of the Syncro
inputs can be selected to either 11.8V or 90V standard devices. You may use the onboard
excitation oscillator or you may wish to use an external reference source. The external
reference signal is scalable with an onboard voltage divider. Reference phase shift can be
adjusted with a resistor capacitor pair for each channel (not factory set). Special design
procedures have been followed to ensure error free stable operation even up to 16-bit
resolution. Both input channels have independent grounds for reference and sensors. Syncro
signals are converted to sine/cosine resolver signals with a laser trimmed precision solid state
Scott-T converter. The resolver signal is then digitized by the onboard resolver-to-digital
converters.
Excitation circuitry
A programmable reference oscillator is available onboard to drive sensors.
The frequency and amplitude of the sine wave are programmable. Digital potentiometers
are used to give stable operation and flexible 32-step adjustment of excitation characteristics.
The reference source is common to both channels. Independent output buffer amplifiers
are used to drive the sensors. The onboard DC/DC converter can be used to drive total
loads of 1,5W. If you connect the bus power to drive the excitation amplifier circuitry you
may increase the drive to 2,5W. In this case make sure you provide adequate airflow around
the excitation amplifier not to thermally overload the device. The excitation frequency is
factory set to 400Hz to 1,6KHz range. This range can easily be increased to 2,6KHz to work
with common resolver types with a small adjustment. Please consult tha factory for more
details.
Page 2
ERES104 Ver 1.2 (c) RTD Finland Oy 2000-2001