Contents SMR-3700 New Rev.1.0(071204)
Chapter 1. Overview ................................................................................. 3
1.1. Equipment ............................................................................. 3
1.2. Features ................................................................................ 3
1.2.1. Scanner ............................................................... 3
1.2.2. Display Unit.......................................................... 3
1.3. Composition ........................................................................... 3
1.4. Construction........................................................................... 3
1.5. Specifications ......................................................................... 4
1.5.1. General................................................................ 4
1.5.2. Scanner (RSU-3700) ............................................. 4
1.5.3. Display Unit (SMR-3700) ....................................... 5
1.5.4. Connection Cable.................................................. 5
Chapter 2. How it works ............................................................................ 6
2.1. What is Radar ?........................................................................6
2.2. Measuring of ownship position before Radar being invented........6
2.3. Measurement of Radar.............................................................. 6
2.4. Measurement of a Course ......................................................... 6
2.5. Speed of Radar waves & Antenna rotation .................................6
2.6. Radar Display...........................................................................6
Chapter 3. How to operate panel and menu ............................................. 7
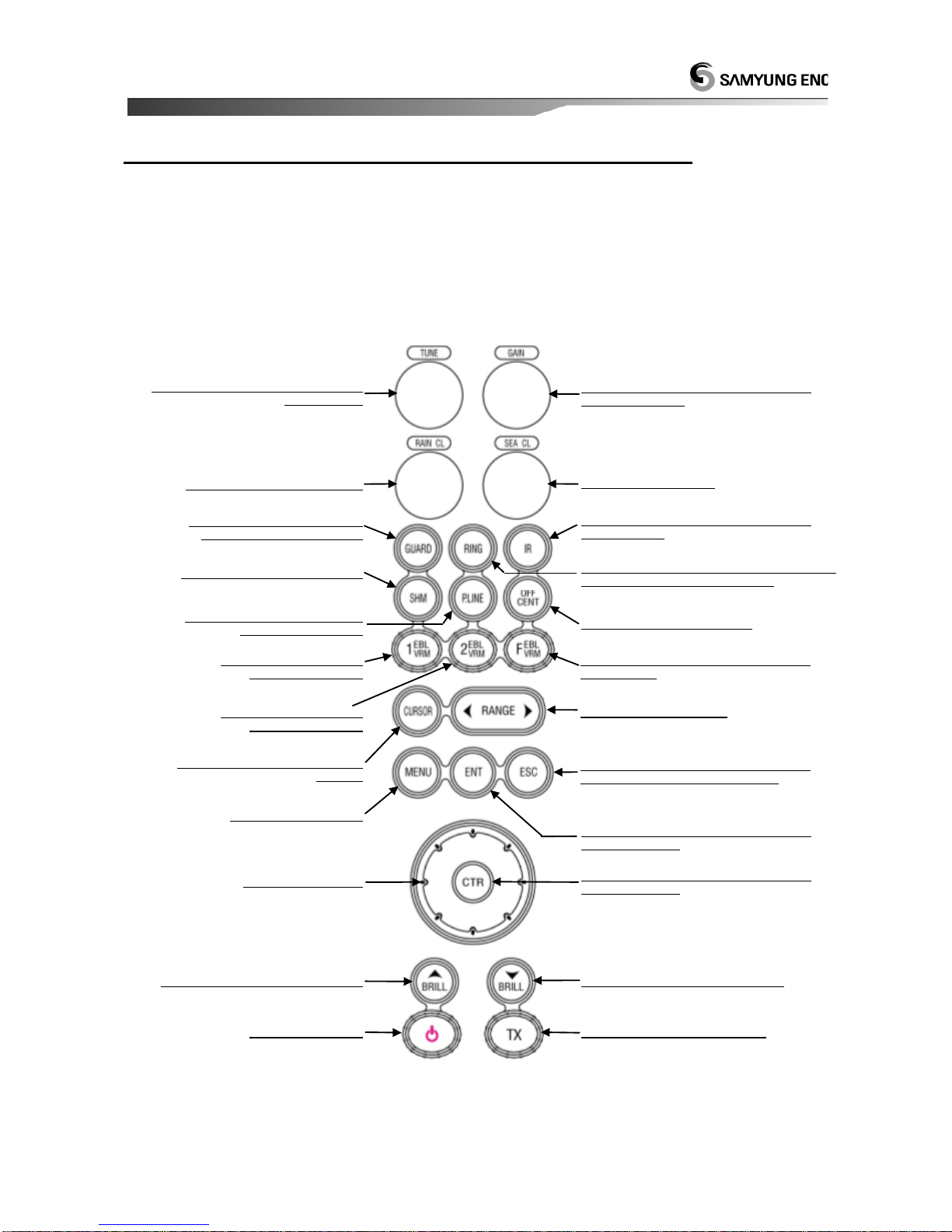
3.1. Front Panel Buttons and Knob ...................................................7
3.1.1. Front Function........................................................7
3.1.2. Directional Key .......................................................8
3.1.3. Display Characters .................................................. 8
3.2. Display Description ................................................................... 8
3.3. Menu Functions ........................................................................ 9
3.3.1. Menu Composition .................................................. 9
3.3.2. MENU Functions ................................................... 11
Chapter 4. How to operate the unit......................................................... 13
4.1. General Idea .......................................................................... 13
4.1.1. Power Input and Operation ................................... 13
4.1.2. Tuning Control...................................................... 13
4.1.3. Image Control ...................................................... 13
4.1.4. Power Off............................................................. 13
4.2. Stand-by for Processing .......................................................... 13
4.2.1. Brightness Change................................................ 13
4.2.2. Language Selection............................................... 13
4.3 Basic Operation ....................................................................... 13
4.3.1. TX ....................................................................... 13
4.3.2. TX Stop................................................................ 13
4.3.3. Tuning Control...................................................... 13
4.3.4. Gain Control ......................................................... 14
4.3.5. Rain/Snow Removal .............................................. 14
4.3.6.
To remove the interference of Sea Level Wave caused by the Sea Wave
.. 15
4.3.7. To operate the alert function.................................. 15
4.3.8. To eliminate/display the scale of Range Ring .......... 16
4.3.9. To remove the Radar Interference ......................... 16
4.3.10. To eleminate the Ship’s Heading Line ................... 16
4.3.11. To use the parallel line ........................................ 17
4.3.12. To move the center of own ship ........................... 17
4.3.13.
To measure the distance and bearing to the Target
...... 17
4.3.14. To change distance unit....................................... 18
4.3.15. To change the way of direction symbol................. 18
4.3.16. To change the way of bearing display................... 19
4.3.17. To change the way of displaying bearing ine/cursor19