IEMAN000001
R003
2 of 22
CAN Interface pHAT User Manual
01/06/2018 2 of 22
Contents
1 Introduction...................................................................................................................... 3
1.1
What is the purpose of this document ........................................................................................... 3
1.2
Who should read this document.................................................................................................... 3
1.3
How is this document organised ................................................................................................... 3
1.4
How do you receive more information........................................................................................... 4
1.5
Document Revision history............................................................................................................ 4
1.6
Supporting documents................................................................................................................... 4
1.6.1
External publications............................................................................................................. 4
1.7
Trademarks ................................................................................................................................... 4
2 Hazards, Warnings and Conformance............................................................................ 5
2.1
Hazardous Voltages ...................................................................................................................... 5
2.2
ESD Precautions ........................................................................................................................... 5
2.3
RoHS ............................................................................................................................................. 5
2.4
CE Marking.................................................................................................................................... 5
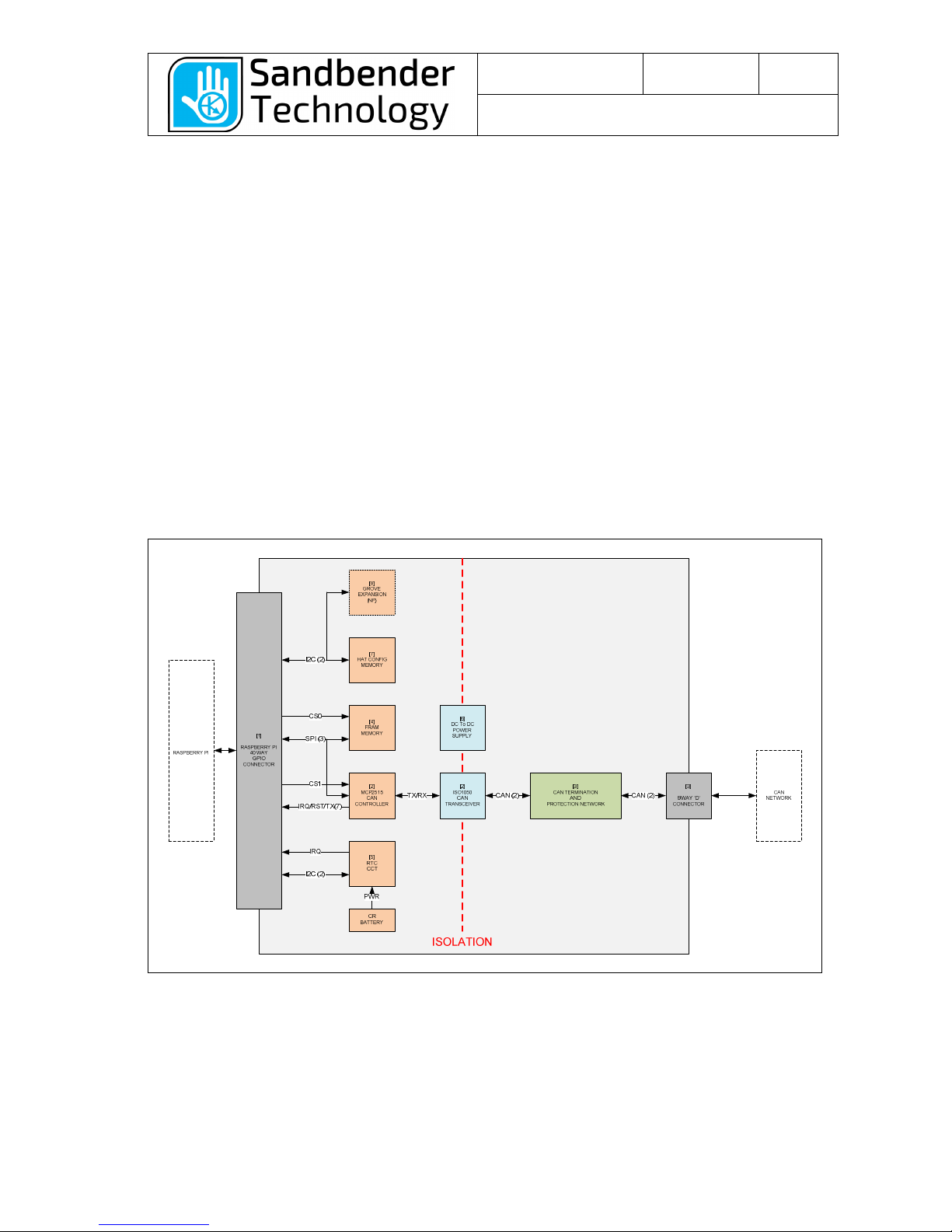
3 Functional Description .................................................................................................... 6
3.1
Overview........................................................................................................................................ 6
3.2
Functional Groups ......................................................................................................................... 7
3.2.1
HAT 40 WAY GPIO CONNECTOR ...................................................................................... 7
3.2.2
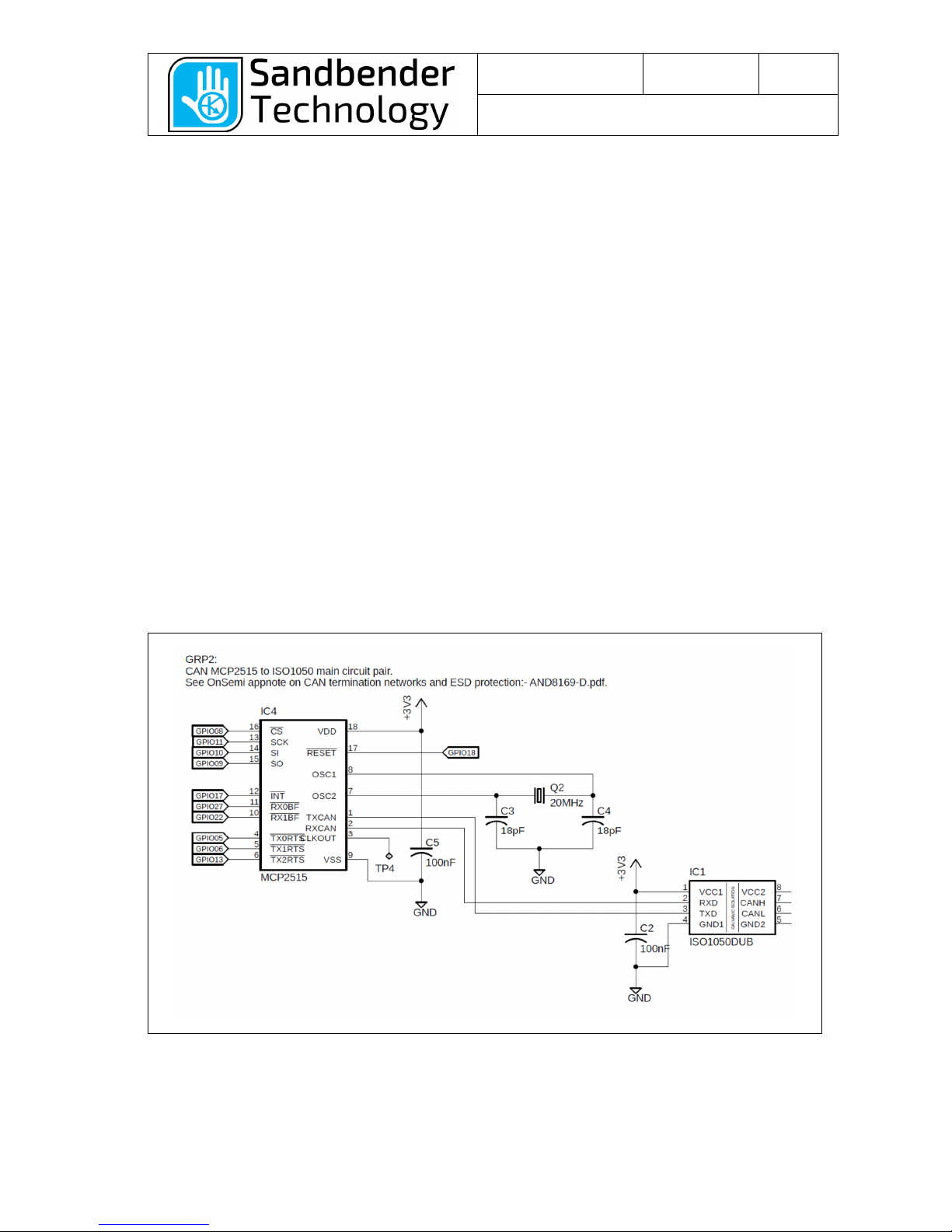
CAN Controller and Transceiver........................................................................................... 8
3.2.3
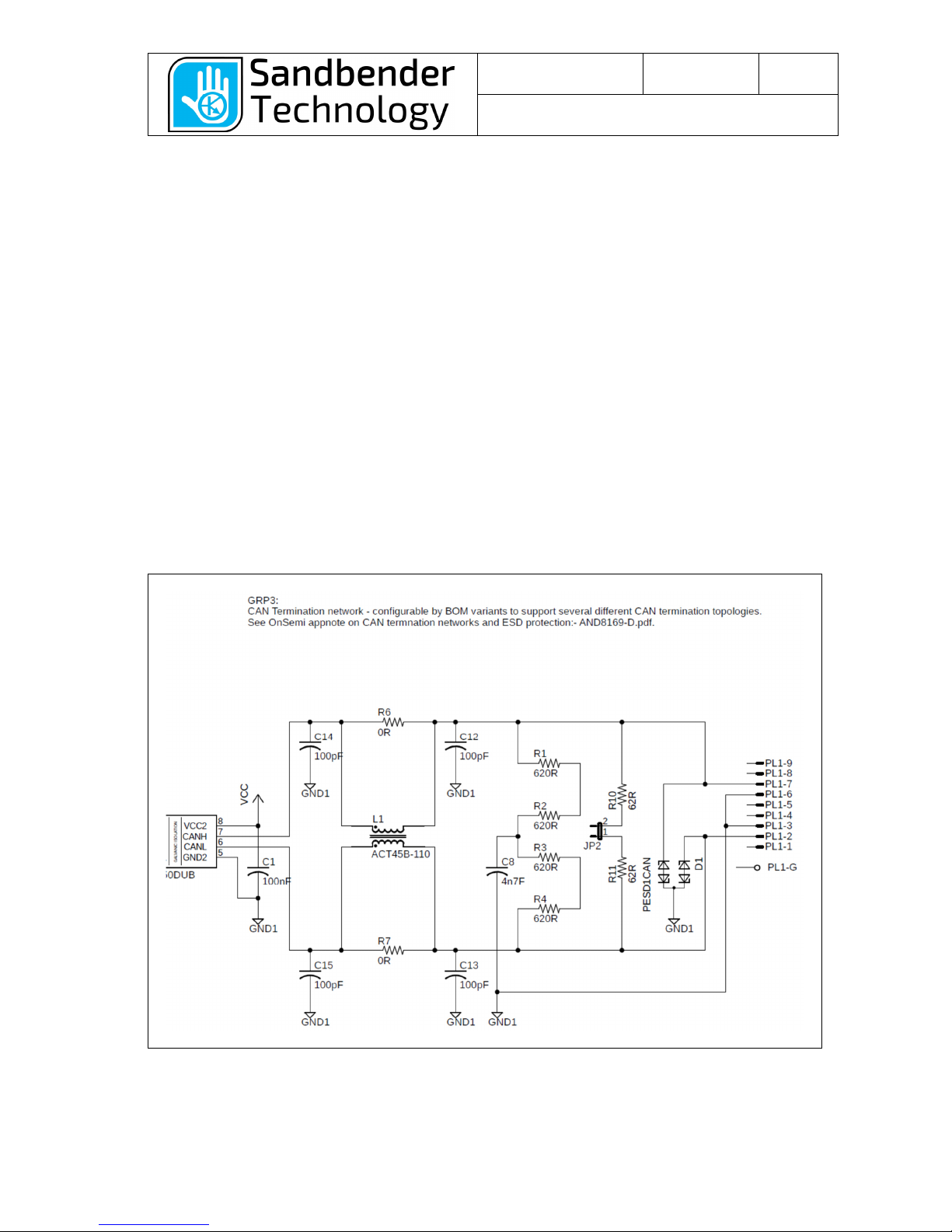
CAN Termination and Connector........................................................................................ 10
3.2.4
FRAM EEPROM ................................................................................................................. 11
3.2.5
RTC and Battery ................................................................................................................. 12
3.2.6
DC to DC Converter............................................................................................................ 13
3.2.7
HAT Configuration EEPROM.............................................................................................. 14
3.2.8
Grove Connector ................................................................................................................ 15
3.2.9
Board Mounting Hardware.................................................................................................. 16
4 Application Use.............................................................................................................. 17
4.1
Dimensions and mounting........................................................................................................... 17
4.1.1
Isolation Barrier................................................................................................................... 17
4.2
RTC Battery G1 ........................................................................................................................... 18
4.2.1
Safe Battery Cell Disposal and Handling............................................................................ 19
4.3
EEPROM Memory Protection Jumper JP1 ................................................................................. 20
4.4
CAN Bus Connection PL1 ........................................................................................................... 21
4.5
CAN Termination Jumper JP2..................................................................................................... 22