Typical applications crane industry
■ Port tire cranes, portal cranes
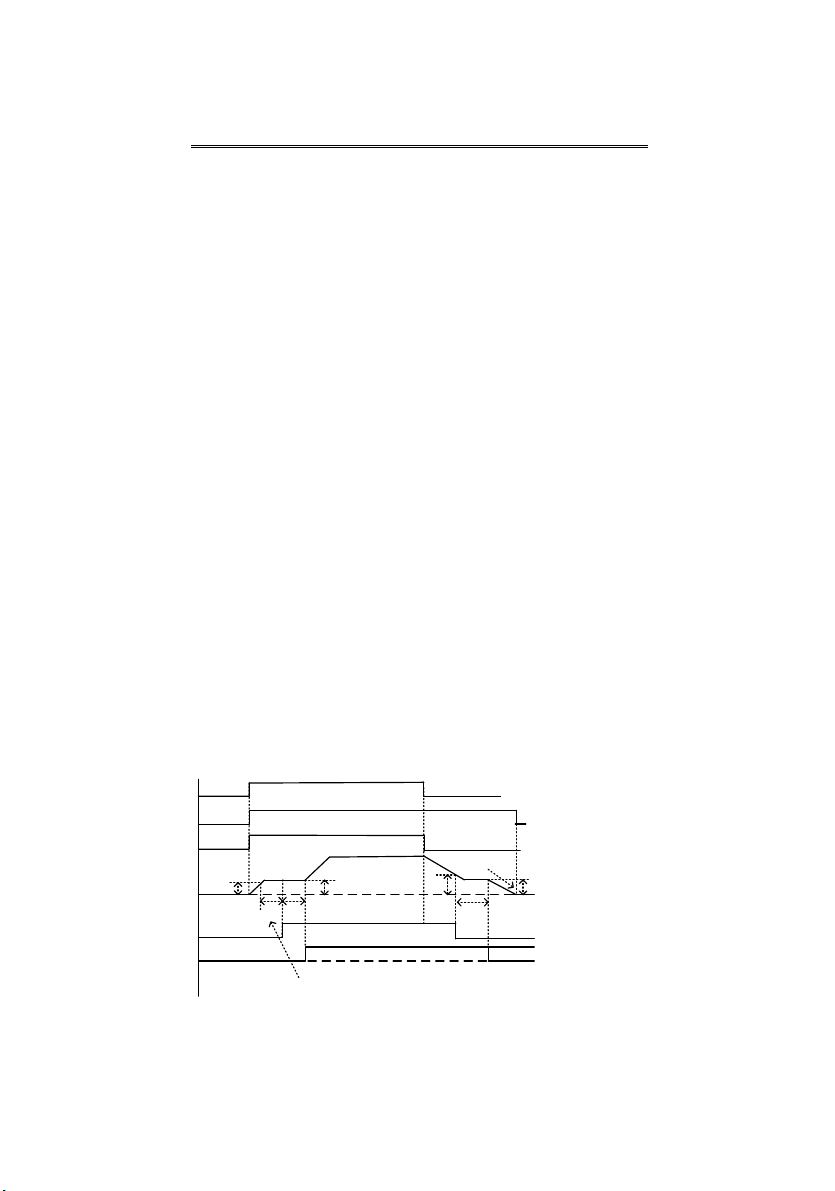
◆ Reliable brake control time sequence to ensure safe and reliable;
◆ Unique torque verification feature ensures the heavy will not have slip phenomenon
when the brake release;
◆ Innovative power optimization and optimization functions ensure that the motor can up to
operation efficiency maximization by safety rated power;
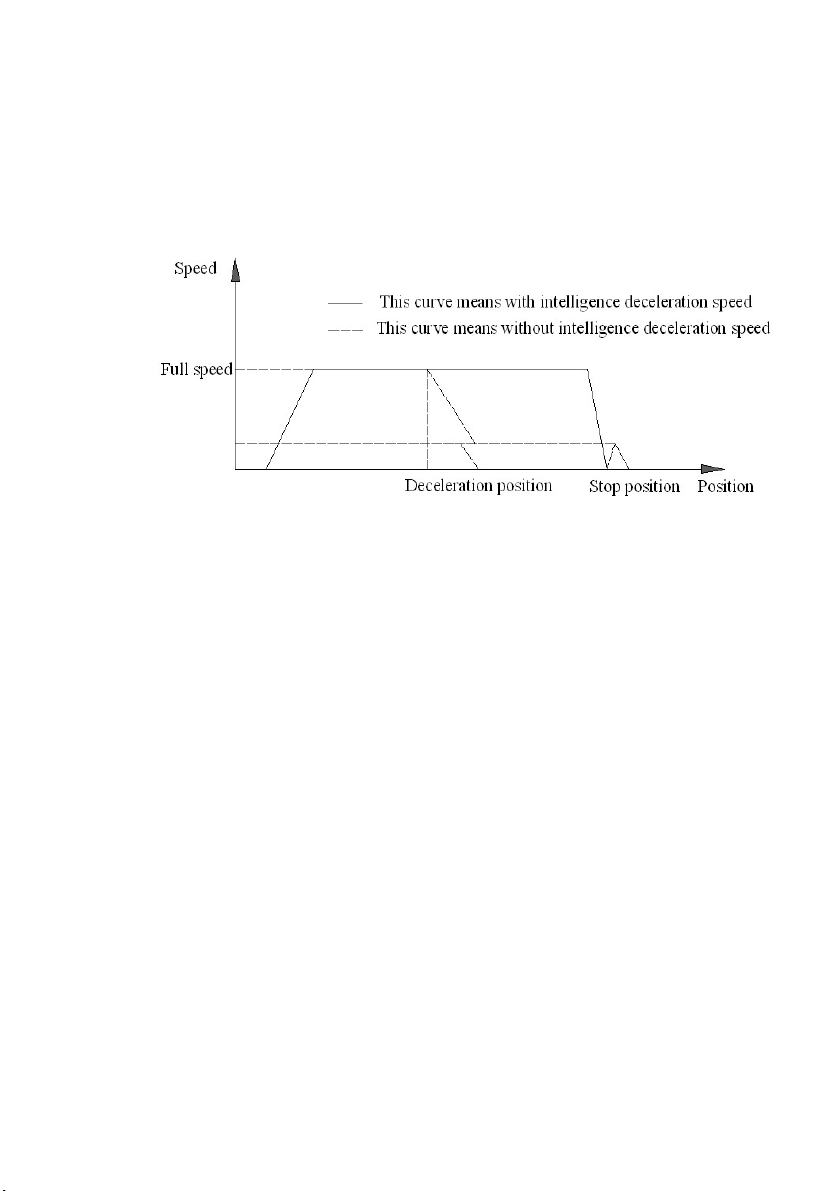
◆ Precise position control and intelligent deceleration function to ensure the system more
secure and reliable, and through intelligent deceleration to prevent upward to the top
phenomenon;
◆ fast response capability ensures easy operation, easy jog to position operation;
◆ Powerful zero speed torque to ensure safety and reliability of the whole system;
◆ Optimized communication format, greatly improving the efficiency and speed of
communication;
◆ Compatible with a variety of communication modes to meet the communication needs of
different systems.
■ Tower cranes/ lifts
◆ Arbitrary acceleration and deceleration and arbitrary impact load conditions, the inverter
runs stable without tripping on the premise of improving energy efficiency;
◆ Strong ability to adapt to the environment, to ensure that the inverter in the wind, rain,
sun, strong vibration and other harsh outdoor environment safe and reliable operation;
◆ Powerful low frequency torque to ensure that does not occur slip phenomenon when
heavy objects is upward;
◆ Excellent control performance ensure that the system is compatible with the open-loop
and closed-loop control;
◆ No need independent fault reset button, intelligent fault reset mode, making the system
easy to operate, more secure and reliable;
◆ optimized lift control logic, making the rise and fall during the startup and shutdown
smoothly without shocks.
■ Electric hoist, overhead crane
◆ Modular electric hoist special inverter, installation easier;
◆ The characteristics of the motor in the tapered, development control software for conical
motor, the inverter perfect integrated with conical motor;
◆ Accurate low speed vector running algorithm to ensure that low-speed region can
achieve sufficient startup ability to prevent slip hook phenomenon;
◆ No need auto tuning normal operation of the performance without affecting, truly
maintenance free debugging features;
◆ High reliability, low cost nature, no need PLC control circuits, simplifying the technical
program, the protection of the product quality and safety of the premise, reduce