9
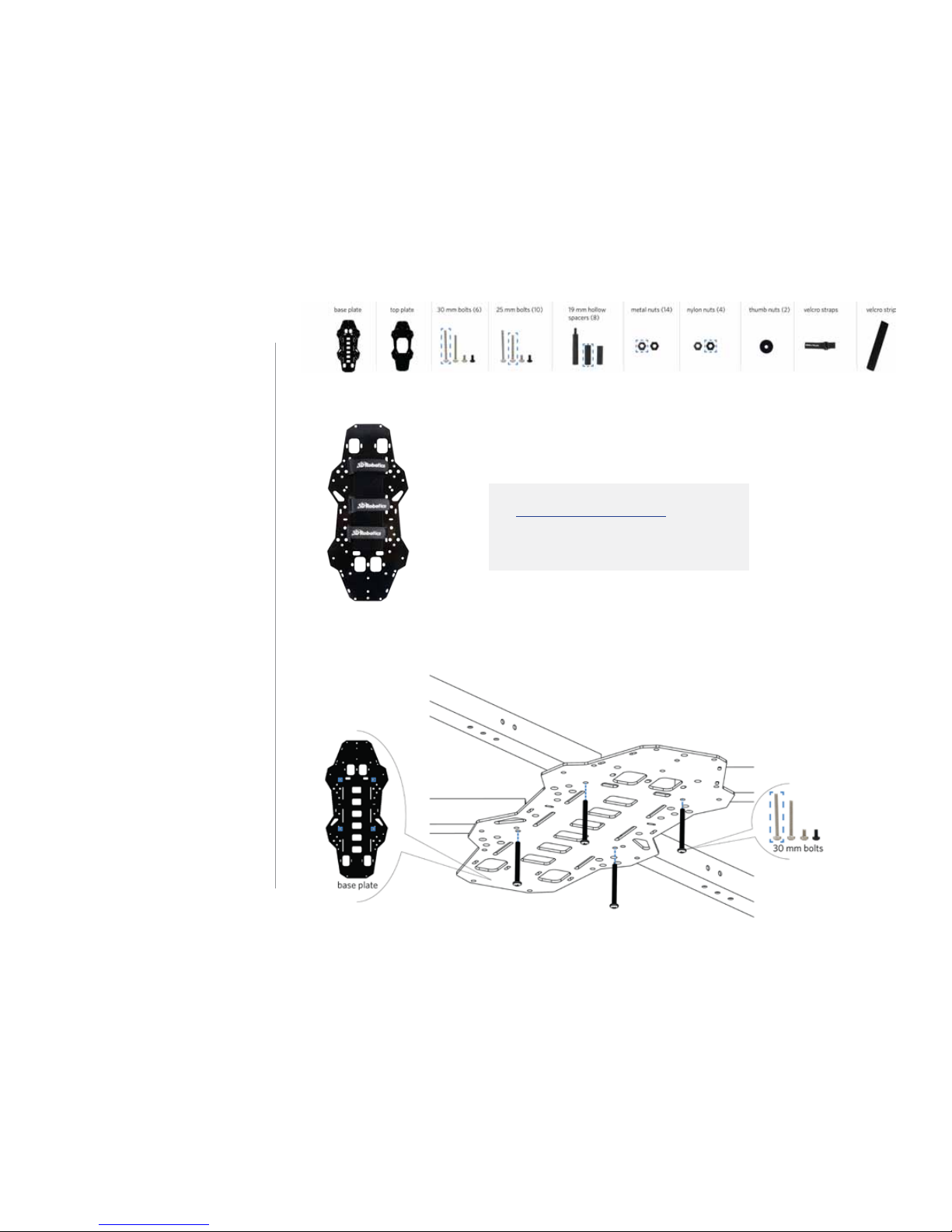
3Body plate
assembly
Follow these instructions to assemble
the body plates.
1 Add velcro straps to base plate
Thread the two velcro straps through
the slots in the base plate. These
straps will hold the battery to the
bottom of your copter. The perfectly
flat side of the plate (without the
protruding nuts) should face down.
Your kit includes two velcro strips to
attach to the battery and the bottom
of the copter. To install, attach the
strip with loops (fuzzy) to the bottom
of the plate between the straps, and
attach the strip with hooks (smooth)
to your battery.
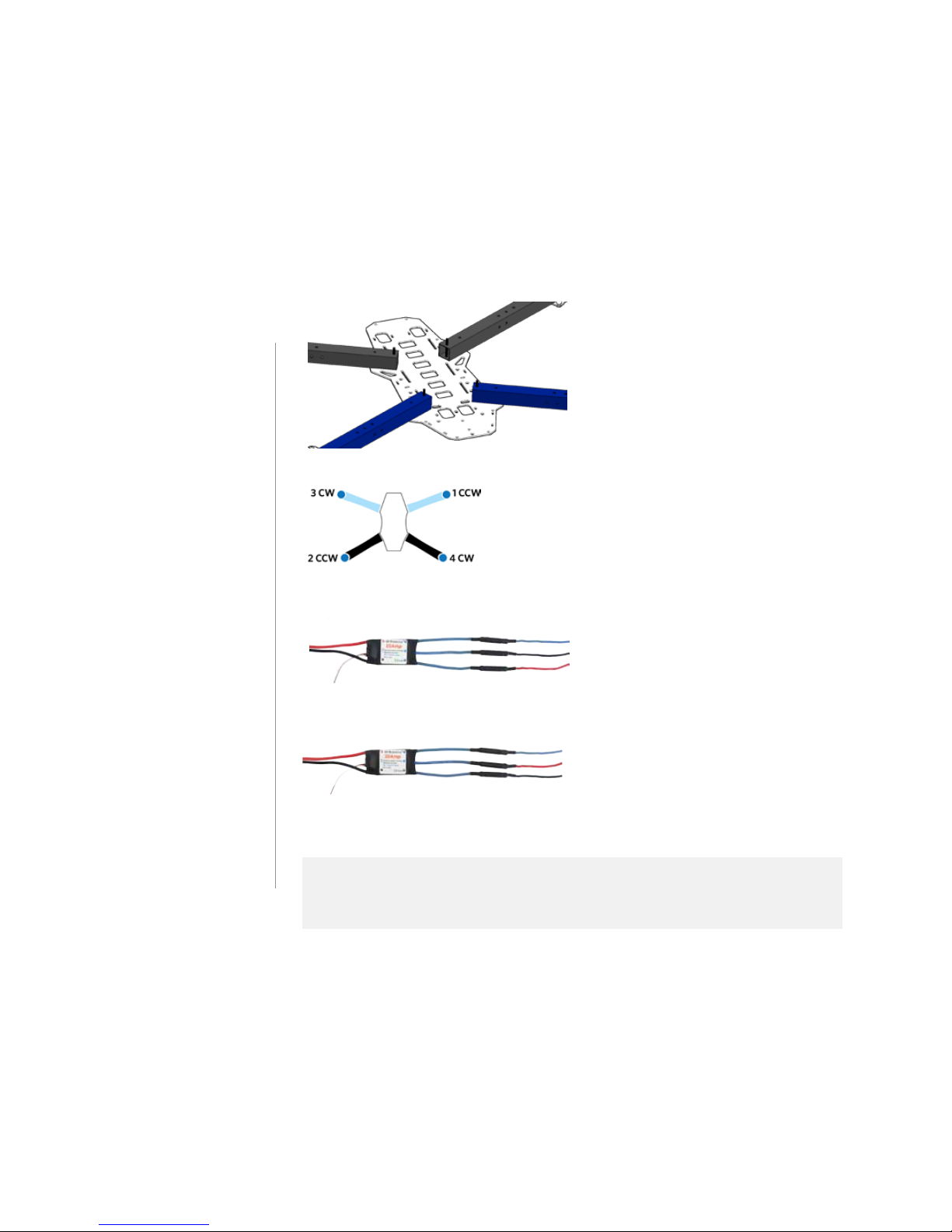
2 Attach arms to base plate
Now we’ll attach the four arms with
assembled motors to the base plate.
Using the innermost hole in the arm
and the hole in the base plate marked
below, insert a 30 mm screw from
the bottom, up through the plate and
the arm. Attach the two black arms
and two blue arms as shown in
relation to the shape of the plate.
(Attach the black arms to the more
elongated end of the plate.)
Visit the APM:Copter Wiki and learn
more about which batteries to use
with your copter.