Hardware and physical integration guideline PCR Sensor A111
Page 3 of 32
2019-12-04 Tel: 0755-2328 2845 深圳市佰誉达科技有限公司
Table of Contents
1 Introduction..................................................................................................................................... 4
1.1 Radar loop equation................................................................................................................. 4
1.2 Radar radiation pattern............................................................................................................ 5
2 HW Integration - Schematics .......................................................................................................... 6
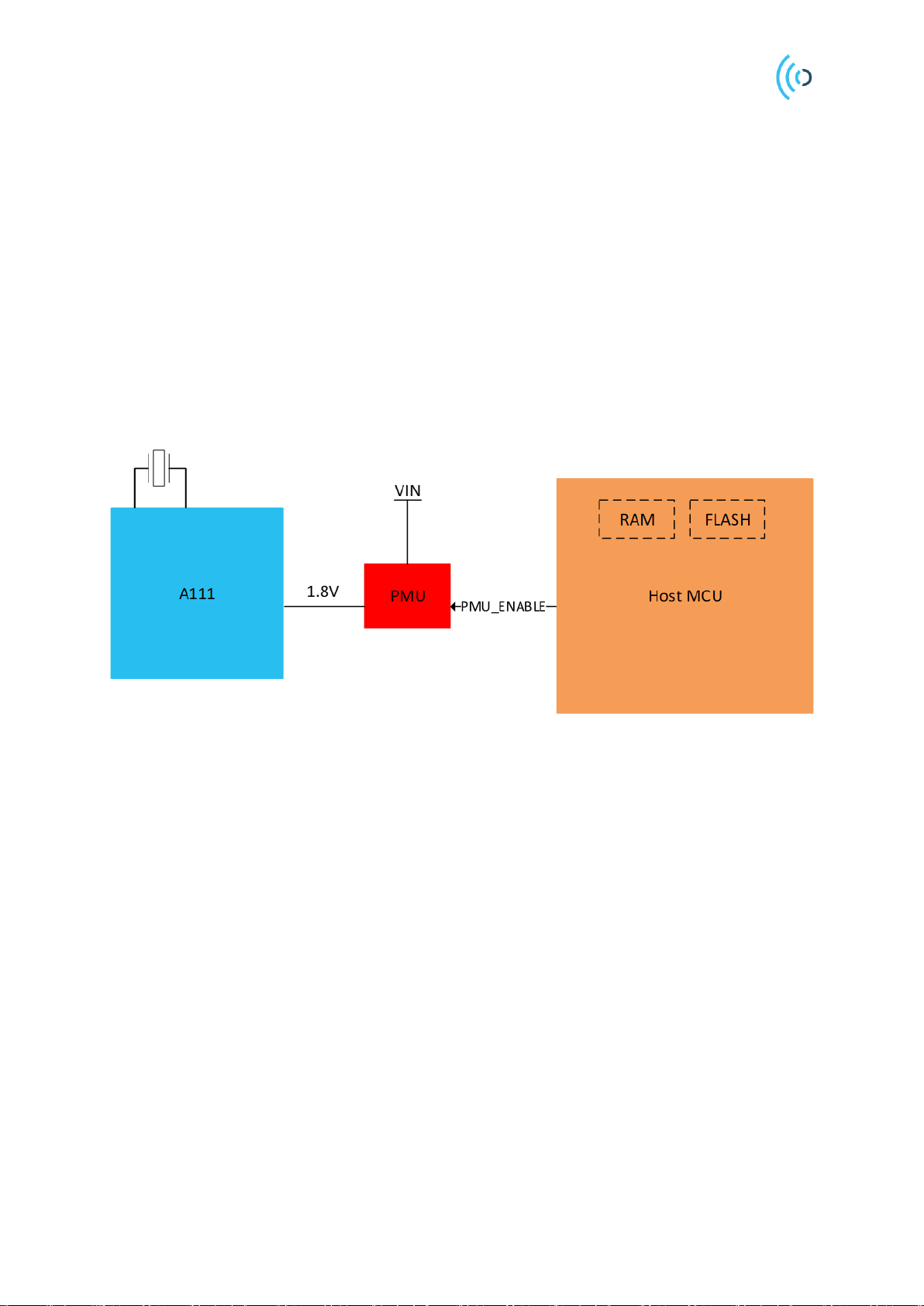
2.1 Power....................................................................................................................................... 6
2.2 SPI Interface............................................................................................................................ 7
3 HW Integration - PCB..................................................................................................................... 8
3.1 Sensor ground plane................................................................................................................ 8
3.2 Sensor underfill ....................................................................................................................... 9
3.3 Integration with other components.......................................................................................... 9
3.4 A111 Decoupling capacitors ................................................................................................. 10
3.5 A111 Crystal.......................................................................................................................... 11
4 Physical Integration....................................................................................................................... 13
4.1 Radome integration ............................................................................................................... 13
4.2 Radome thickness.................................................................................................................. 15
4.3 Radome distance.................................................................................................................... 16
4.4 Impact on the radiation pattern.............................................................................................. 18
4.5 Multi-layer radome integration.............................................................................................. 20
5 Physical Integration - Lens............................................................................................................ 22
5.1 Focal distance........................................................................................................................ 23
5.2 Radiation pattern................................................................................................................... 25
5.3 FZP Lens Design................................................................................................................... 26
6 Appendix A: Materials.................................................................................................................. 29
7 References..................................................................................................................................... 30
8 Revision......................................................................................................................................... 31
Disclaimer ............................................................................................................................................. 32