[AK8975/C]
3. Table of Contents
1. Features....................................................................................................................................1
2. Overview ...................................................................................................................................2
3. Table of Contents ......................................................................................................................3
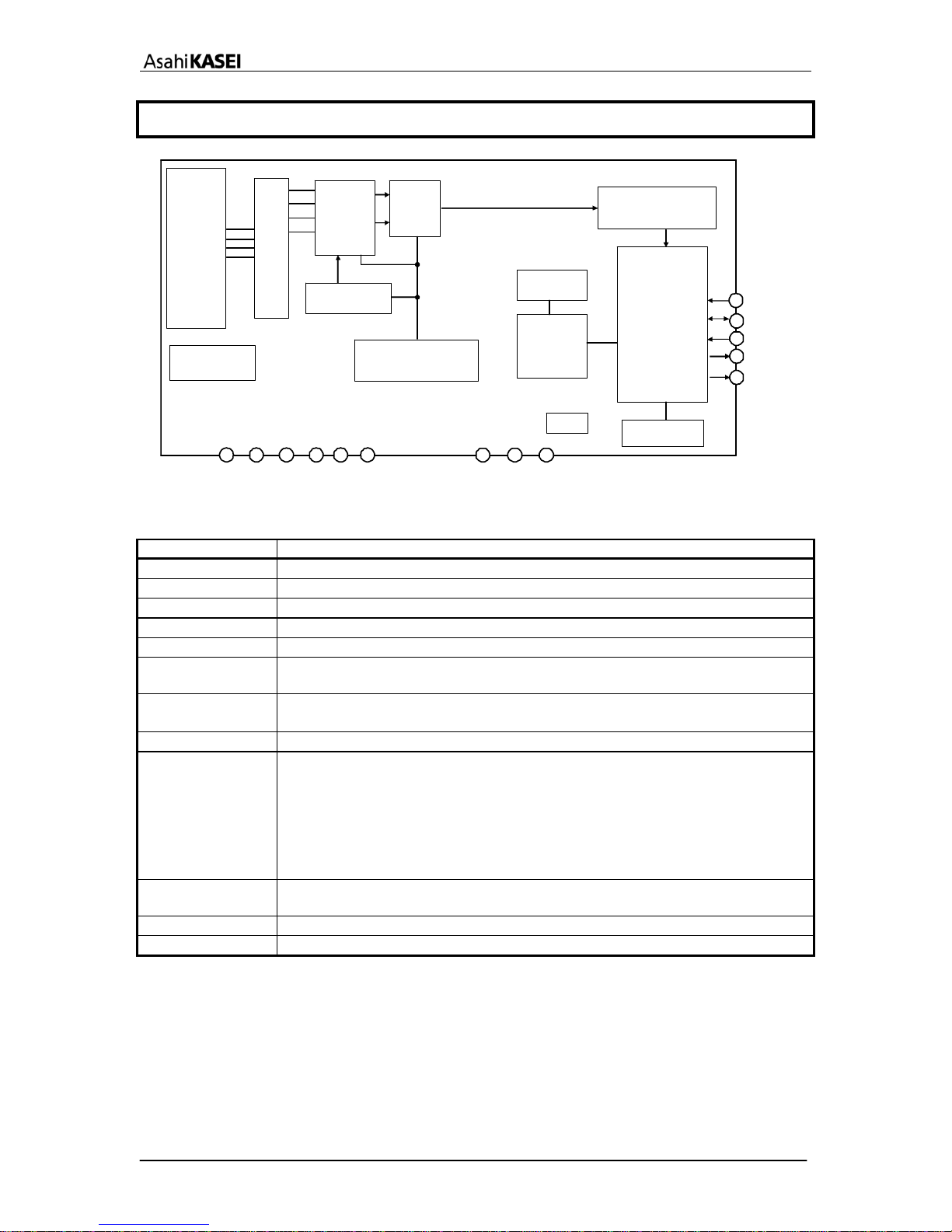
4. Circuit Configuration..................................................................................................................5
4.1. Block Diagram....................................................................................................................5
4.2. Block Function....................................................................................................................5
4.3. Pin Function.......................................................................................................................6
5. Overall Characteristics ..............................................................................................................7
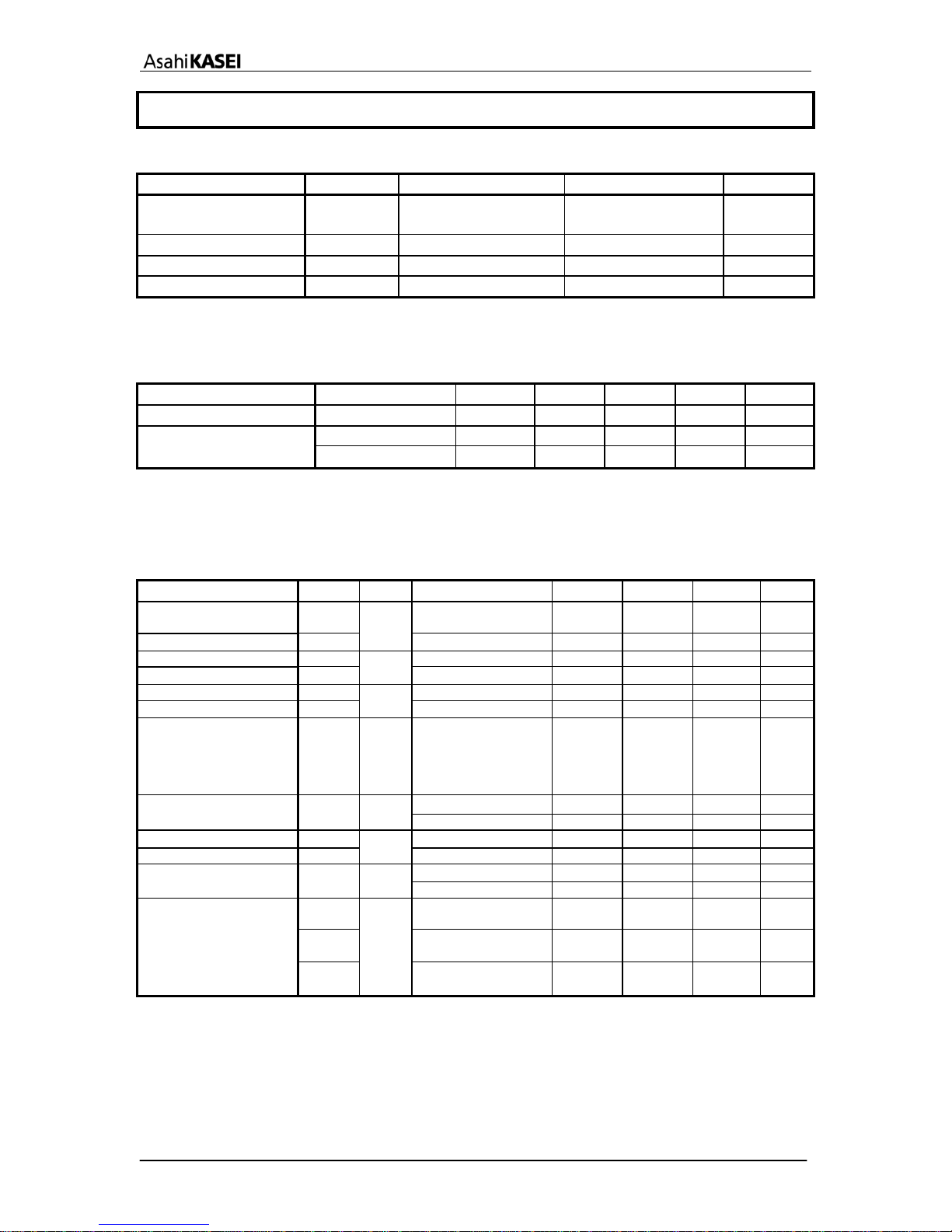
5.1. Absolute Maximum Ratings................................................................................................7
5.2. Recommended Operating Conditions ................................................................................7
5.3. Electrical Characteristics....................................................................................................7
5.3.1. DC Characteristics......................................................................................................7
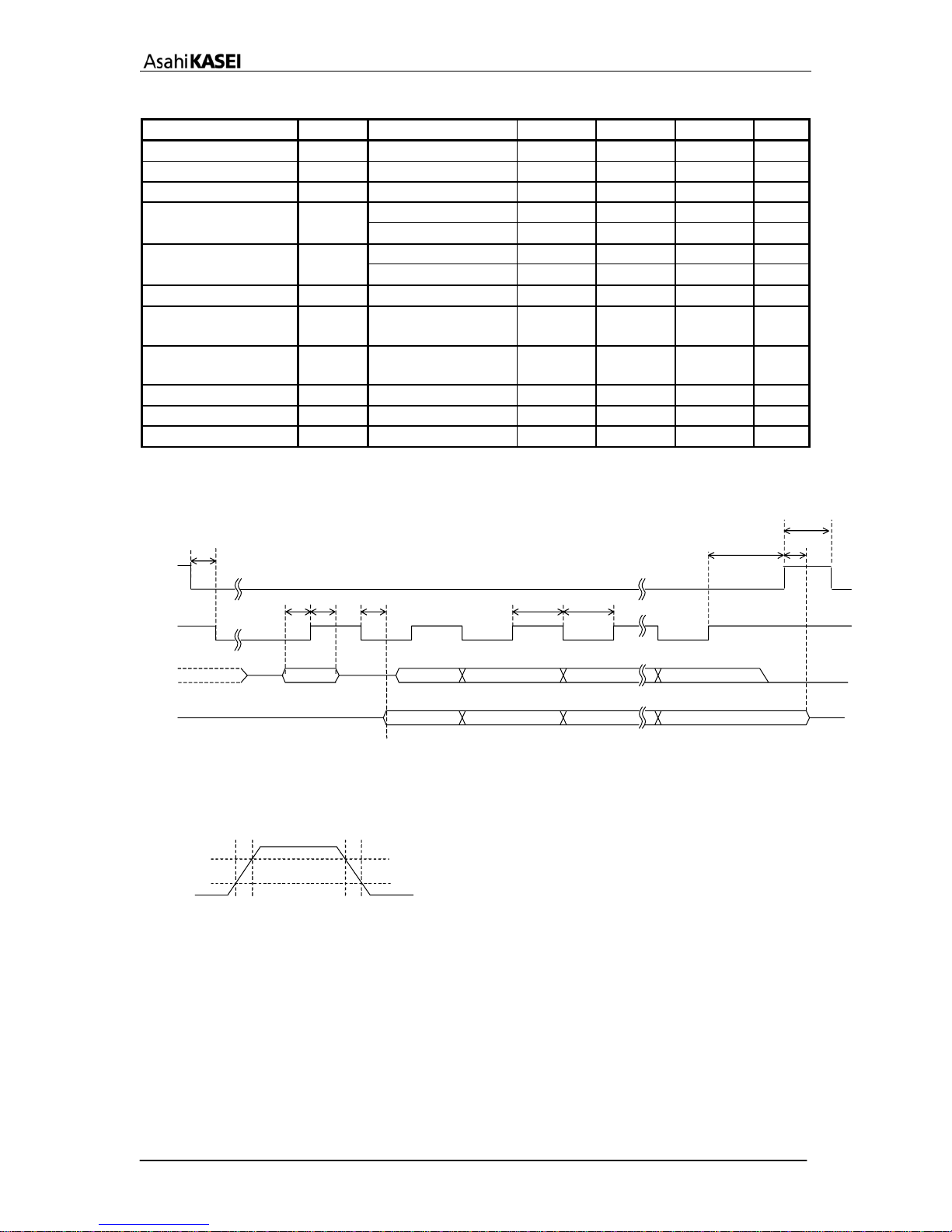
5.3.2. AC Characteristics ......................................................................................................8
5.3.3. Analog Circuit Characteristics.....................................................................................8
5.3.4. 4-wire SPI ...................................................................................................................9
5.3.5. I2C Bus Interface.......................................................................................................10
6. Functional Explanation............................................................................................................11
6.1. Power States....................................................................................................................11
6.2. Reset Functions ...............................................................................................................11
6.3. Operation Modes..............................................................................................................12
6.4. Description of Each Operation Mode................................................................................13
6.4.1. Power-down Mode....................................................................................................13
6.4.2. Single Measurement Mode .......................................................................................13
6.4.2.1. Data Ready........................................................................................................13
6.4.2.2. Data Error ..........................................................................................................14
6.4.2.3. Magnetic Sensor Overflow.................................................................................14
6.4.3. Self-test Mode...........................................................................................................15
6.4.4. Fuse ROM Access Mode ..........................................................................................15
7. Serial Interface........................................................................................................................16
7.1. 4-wire SPI.........................................................................................................................16
7.1.1. Writing Data ..............................................................................................................16
7.1.2. Reading Data............................................................................................................17
7.2. I2C Bus Interface..............................................................................................................18
7.2.1. Data Transfer ............................................................................................................18
7.2.1.1. Change of Data..................................................................................................18
7.2.1.2. Start/Stop Condition ...........................................................................................18
7.2.1.3. Acknowledge......................................................................................................19
7.2.1.4. Slave Address....................................................................................................19
7.2.2. WRITE Instruction.....................................................................................................20
7.2.3. READ Instruction.......................................................................................................21
7.2.3.1. One Byte READ.................................................................................................21
7.2.3.2. Multiple Byte READ ...........................................................................................21
8. Registers.................................................................................................................................22
8.1. Description of Registers...................................................................................................22
8.2. Register Map....................................................................................................................23
8.3. Detailed Description of Registers.....................................................................................24
8.3.1. WIA: Device ID..........................................................................................................24
8.3.2. INFO: Information......................................................................................................24
8.3.3. ST1: Status 1.............................................................................................................24
8.3.4. HXL to HZH: Measurement Data...............................................................................25
8.3.5. ST2: Status 2.............................................................................................................26
8.3.6. CNTL: Control...........................................................................................................26
8.3.7. RSV: Reserved .........................................................................................................27
8.3.8. ASTC: Self Test Control ............................................................................................27
8.3.9. TS1, TS2: Test 1, 2 ...................................................................................................27
8.3.10. I2CDIS: I2C Disable...................................................................................................27
8.3.11. ASAX, ASAY, ASAZ: Sensitivity Adjustment values...................................................28
MS1187-E-02 - 3 - 2010/05