C.Plath NAVIGAT X MK 1 Mod. 10 User manual

3-149 MK110ENG.P65
Printed in Germany
Stock No.056310
Head Office and Freight: Stueckenstrasse 1-3, D-22081 Hamburg, Germany
Correspondence Address: P.O. Box 76 08 60, D-22058 Hamburg, Germany
Tel. ++ 49 - 40 - 299 00-0, Fax ++ 49 - 40 299 00-298, Telex 2 15 202 a plat d, E-mail: HDR@GW.LITEF.DE
11 AUG 98 REV A
Operator, Technical, Installation and Service Manual
NAVIGAT X MK 1 Mod. 10
SR 180-MK 1 Mod. 10
Digital Gyrocompass System

Copyright © C. PLATH, Hamburg 1998
This document contains proprietary information of C. PLATH in Hamburg,
Germany.
Any use, reproduction or publication of this manual or any portions thereof
for purposes other than operation and maintenance by the recipient is
expressly prohibited without the prior written consent of C. PLATH. Subject
to alteration without notice.
* * *
Die in diesem Handbuch enthaltenen Angaben sind Eigentum der Firma
C. PLATH in Hamburg, Deutschland.
Der Gebrauch, die Vervielfältigung oder die Veröffentlichung dieses Hand-
buches in der Gesamtausgabe oder in Auszügen zu anderen Zwecken als
der Bedienung und der Wartung durch den Empfänger, ist nur mit vorheriger
schriftlicher Genehmigung der Firma C. PLATH gestattet. Technische Ände-
rungen vorbehalten.
* * *
Les données contenues dans cette brochure sont propriété de l’entreprise
C. PLATH de Hambourg.
Toute utilisation, reproduction ou publication de cette brochure, soit en totalité,
soit sous forme d’extraits, à toute autre fin que le service et l’entretien du
metériel par le destinataire, n’est autorisée qu’après accord écrit de la société
C. PLATH. Sous réserve de modifications techniques.
* * *
Los datos que contiene este manual se refieren a la propiedad de la firma
C. PLATH en Hamburgo.
El uso, la reproduccion o la publicacion de este manual en su total o en
parte para otros motivos que no sean ni de servicio ni de mantenimiento es
prohibido sin un permiso escrito especial de la firma C. PLATH.
Modificaciones tecnicas son reservadas.
NAVIGATION AUTOMATION
.

Contents-I
NAVIGAT X MK 1 Mod. 10 / SR-180 MK 1 Mod. 10 056310
3-149 MK110ENG.P65
LIST OF CONTENTS
Chap./ Page
Sect.
1 DESCRIPTION
1.1 Design and Main Features ..................................................................... 1-01
1.2 Technical Data ........................................................................................ 1-02
2 OPERATION
2.1 Display and Control Elements ................................................................ 2-01
2.2 Operating Conditions ............................................................................. 2-01
2.3 Operation................................................................................................ 2-02
2.3.1 Power-up Sequence ...................................................................... 2-02
2.3.2 Heading Reference Source Selection ........................................... 2-02
2.3.3 Display Illumination ........................................................................ 2-02
2.3.4 Confirm Alarm / Mute Alarm Buzzer.............................................. 2-02
2.3.5 Menu Operation ............................................................................. 2-03
2.3.6 Menu Structure .............................................................................. 2-04
2.3.7 Display Data Selection................................................................... 2-05
2.3.8 Optional Functions ......................................................................... 2-06
2.3.9 North Speed Error Correction........................................................ 2-06
2.4 Manual Settings ..................................................................................... 2-07
2.4.1 Speed/Latitude Input for Automatic Error Correction .................... 2-07
2.4.2 Heading Difference Alarm Threshold ............................................ 2-07
2.4.3 Magnetic Variation ......................................................................... 2-08
2.4.4 North Speed Error Correction........................................................ 2-08
2.4.5 Voyage Data Printer (Set. NAVIPRINT) ......................................... 2-08
2.4.6 Rate Of Turn Damping Time Constant / Alarm Threshold ............. 2-09
2.4.7 Manual Settings – Overview .......................................................... 2-10
2.5 Setup Menu – User Setup...................................................................... 2-11
2.5.1 Date / Time .................................................................................... 2-11
2.5.2 Software Version ............................................................................ 2-11
2.5.3 Magnetic Compass Calibration Table ............................................ 2-11
2.5.2 User Setup – Overview.................................................................. 2-12
3 ALARMS AND ERRORS
3.1 Alarm System ......................................................................................... 3-01
3.1.1 Alarm Indication ............................................................................. 3-01
3.1.2 Alarm Relays ................................................................................. 3-02
3.1.3 Error List ........................................................................................ 3-02
3.2 Service Setup 2 ...................................................................................... 3-03
3.2.1 Access Code.................................................................................. 3-03
3.2.2 Gyrosphere Data ........................................................................... 3-03

Contents-II
NAVIGAT X MK 1 Mod. 10 / SR-180 MK 1 Mod. 10 056310
3-149 MK110ENG.P65
3.2.3 Op. Time Counter........................................................................... 3-03
3.2.4 Data List ......................................................................................... 3-03
3.2.5 Error List ........................................................................................ 3-03
3.2.6 Masterboard Reset (reset MK 1) ................................................... 3-03
3.2.7 Service Setup 2 – Overview .......................................................... 3-04
3.3 Locating Errors ....................................................................................... 3-05
3.3.1 Failure Indication (red LEDs) ......................................................... 3-05
3.3.1 Activity/Status Indication (green LEDs) ......................................... 3-06
4 INSTALLATION AND INITIALIZATION
4.1 Installation of the Compass Housing ..................................................... 4-02
4.2 Electrical Connections ........................................................................... 4-02
4.2.1 The Connection Diagram............................................................... 4-02
4.2.2 Connecting the Ship's Cables ....................................................... 4-03
4.3 Installation of the Gyrosphere ................................................................ 4-03
4.4 Basic System Configuration ................................................................... 4-03
4.4.1 Alignment Error Correction ............................................................ 4-04
4.5 Magnetic Compass Calibration .............................................................. 4-05
4.5.1 Determinging Correction Values .................................................... 4-05
4.5.2 Storing the Calibration Table.......................................................... 4-06
4.6 Service Setup 1 ...................................................................................... 4-07
4.6.1 Access Code.................................................................................. 4-07
4.6.2 Interface Configuration (Interface I/O) ........................................... 4-07
4.6.3 Analogue Rate Of Turn Output ...................................................... 4-09
4.6.4 Rudder Angle Feedback Inputs ..................................................... 4-09
4.6.5 System Type .................................................................................. 4-10
4.6.6 Alignment Error Correction Value .................................................. 4-10
4.6.7 Shaft Encoder Correction Angle .................................................... 4-10
4.6.8 Ext. Status Input ............................................................................ 4-11
4.6.9 Name of Gyro ................................................................................ 4-11
4.6.10 Test Mode ...................................................................................... 4-11
4.6.11 Service Setup 1 – Overview .......................................................... 4-12
5 MAINTENANCE INFORMATION AND INSTRUCTIONS
5.1 Maintenance Specifications ................................................................... 5-01
5.1.1 Annual Maintenance ...................................................................... 5-01
5.1.2 Five-Year Maintenance .................................................................. 5-01
5.2 Maintenance by Shipboard Personnel ................................................... 5-02
5.2.1 Removal of the Gyrosphere Container
at Low Ambient Temperatures ....................................................... 5-02
5.3 Maintenance by Service Personnel ....................................................... 5-04
5.3.1 Gyrosphere Handling and Storage Instructions ............................ 5-04
5.3.2 Safety Warning .............................................................................. 5-04
5.3.3 Installation of the Gyroshpere ....................................................... 5-05
5.3.4 Removal of the Gyrosphere ........................................................... 5-15

Contents-III
NAVIGAT X MK 1 Mod. 10 / SR-180 MK 1 Mod. 10 056310
3-149 MK110ENG.P65
A TABLES
A.1 Magnetic Compass Calibration Table.................................................... A-01
A.2 Standard Manual Settings..................................................................... A-02
A.3 Basic Configuration Settings (Service-Setup 1) ................................... A-03
A.4 North Speed error Tables ...................................................................... A-04

Contents-IV
NAVIGAT X MK 1 Mod. 10 / SR-180 MK 1 Mod. 10 056310
3-149 MK110ENG.P65
this page intentionally left blank

Page 1-01
NAVIGAT X MK 1 Mod. 10 / SR-180 MK 1 Mod. 10 056310
3-149 MK110ENG.P65
1 DESCRIPTION
1.1 Design and Main Features
NAVIGAT X Mk 1 / SR-180 Mk 1 is a microprocessor controlled gyrocompass system
with integrated automatic north speed error correction.
The system is type approved by the German Federal Maritime and Hydrographic
Agency (BSH) and complies with IMO resolutions A.424 (IX) and A.574 (14) as well
as DNV-W1 and ISO standard 8728.
For use in high speed craft, an optimized system is available, which complies with
IMO resolution A.821 (19) - HSC.
C. PLATH's unique method of supporting the gyrosphere by means of mere buoy-
ancy ensures north stabilization during short power failures. For example, after a
three minute loss of power, no more than two degrees of deviation may be expected.
Once power has been restored, the gyrocompass will return quickly to the correct
heading without requiring the usual settling period. The combined effects of the twin
rotors an the liquid damping system virtually eliminate latitude error.
Heading is measured as a 12 bit absolute value by means of a digital shaft encoder.
The high-speed follow-up system (> 100°/sec.) ensures extremely accurate meas-
urements of heading and rate of turn under all operating conditions.
The system features an integrated TMC-function (magnetic compass transmission)
and input interfaces for a second gyrocompass, speed log, position receiver and two
rudder angle feedback units.
The gyrocompass provides 12 independent serial data outputs to analogue or digital
repeaters (including short-circuit-proof 24 VDC repeater power supply), RS 422 and
NMEA sensor data outputs, a special NMEA Fast output interface (reduced dataset)
and a NMEA Superfast output interface (adjustable baudrate, max 38400 baud). Fur-
thermore, two 6 step/° heading outputs, an analogue rate of turn output and an inter-
face for the voyage data printer NAVIPRINT are provided.
Integrated monitoring and alarm functions for the supply powers, gyroscope temperatur
and current and the follow-up system ensure secure and trouble-free operation of the
system.
The single unit design with a polyurethane hard foam housing of low weight allows
the gyrocompass system to be installed on any bridge, from large yachts to the most
capacious merchant vessels. If required, the integrated control and display unit may
be installed at a remote location from the gyrocompass or an additional remote oper-
ating unit installed.
As an option, a special "compass monitor" control unit is available, which provides
additional independent monitoring functions and features a numerical keypad, which
facilitates the operation of the system.
An optional switch-over unit for twin gyrocompass systems provides for complete
redundancy of all in- and output signals and thus ensures the independence of the
individual compasses.

Page 1-02
NAVIGAT X MK 1 Mod. 10 / SR-180 MK 1 Mod. 10 056310
3-149 MK110ENG.P65
1.2 Technical Data
heading display ............................................... 4-digit
follow-up speed ............................................... > 100°/s
mean settling time........................................... < 3 h
freedom of roll and pitch ................................. ±40°
Accuracy
standard system
linear mean settle point error ................. ≤0.1° sec lat
static error .............................................. ≤0.1° sec lat
dynamic error ......................................... ≤0.4° sec lat
max. deviation after power interruption
of 3 min................................................... < 2°
HSC-system (high speed craft) ...................... accuracies comply to IMO resolution
A.821(19) - HSC
Ambient Temperature Range
operation ......................................................... -10 – +55 °C
storage ............................................................ -25 – +70 °C (w/o supporting fluid)
Power Supply
supply voltage ................................................. 115/230 V~ ±10%;
including automatic switchover to
24 V emergency power supply in
accordance with GMDSS rules for
INMARSAT/SES terminals
or .................................................. 24 VDC (18 - 36 V)
Protection Grade ........................................... IP 23 in accordance with DIN 40050
Environmental Requirements and EMC ..... in accordance with IEC 945
Power Consumption DC AC
start-up ............................................................ 80 W 125 VA
operation ......................................................... 45 W 75 VA
each analogue repeater................................... 7 W 7 VA
each digital repeater ........................................ 7 W 7 VA

Page 1-03
NAVIGAT X MK 1 Mod. 10 / SR-180 MK 1 Mod. 10 056310
3-149 MK110ENG.P65
Data Outputs
repeater outputs.......................................12 gyrocompass heading, magnetic
compass heading, rate of turn, head-
ing reference status; supply power
24 VDC, max. 7 W each
data outputs NMEA....................................2 gyrocompass heading, magnetic
compass heading, rate of turn, posi-
tion, speed, heading reference status
data outputs RS 422 ..................................3 gyrocompass heading, magnetic
compass heading, rate of turn, posi-
tion, speed, heading reference status
data output RS 422 FAST..........................1 gyrocompass heading, magnetic
compass heading, rate of turn
data output RS 422 SUPERFAST .............1 gyrocompass heading, magnetic
compass heading, rate of turn, head-
ing reference status
6 step/°-outputs..........................................2 act. heading; 24 VDC, max. 18 W
(12 –70 VDC with ext. power supply)
analogue rate of turn output ......................1 ±0.1-999.9 mV/°/min, settable;
max. 10V, 10 mA
voyage data printer output .........................1 act. heading, rudder angles, date,
time, heading reference, steering
mode, speed, position
Alarm and Status Outputs
power failure / general device error alarm ...... potential-free contact;
max. 30W, 1A; 125 V
AC power supply ............................................. potential-free contact;
max. 30W, 1A; 125 V
AC power supply ............................................. potential-free contact;
max. 30W, 1A; 125 V
heading reference status (G1/G2/Mag) .......... potential-free contact;
max. 30W, 1A; 125 V
heading difference alarm ................................ potential-free contact;
max. 30W, 1A; 125 V
max ROT alarm ............................................... potential-free contact;
max. 30W, 1A; 125 V
watch alarm trigger output .............................. potential-free contact;
max. 30W, 1A; 125 V

Page 1-04
NAVIGAT X MK 1 Mod. 10 / SR-180 MK 1 Mod. 10 056310
3-149 MK110ENG.P65
Data and Signal Inputs
magnetic heading ........................................... fluxgate sensor, sin/cos type or
electronic compass, NMEA 0183 or
PLATH-format
heading gyro 2 ................................................ NMEA 0183, PLATH-format,
Lehmkuhl LR 20 or LR 40
position............................................................ NMEA 0183
speed .............................................................. NMEA 0183 or 200 pulses/nm
rudder angle.................................................... 2 independent rudder angles, ana-
logue (feedback. potentiometer)
steering mode ................................................. sel. switch status
heading reference ext. (Gyro/Mag;G1/G2) ..... sel. switch status
time const. ROT .............................................. sel. switch status
ext. alarm acknowledge .................................. sel. switch status
Dimensions and Weight
width................................................... 404 mm
height ................................................. 520 mm
depth .................................................. 420 mm
front plate control unit ................... 96 x96 mm
weight..................................................... 25 kg
520
404
420

Page 2-01
NAVIGAT X MK 1 Mod. 10 / SR-180 MK 1 Mod. 10 056310
3-149 MK110ENG.P65
2.2 Operating conditions
Caution:
After a cold start, the gyrocompass system requires a settling time of up to three
hours before reliable heading data is produced. The gyrocompass system is to be in
operation for at least three hours before leaving harbour. It is recommended that the
gyrocompass system be switched off during long docking periods only.
Caution:
The permitted ambient temperature range for the operation of the gyrocompass sys-
tem is -10 – +55 °C.
At ambient temperatures below 0 C° when the gyrocompass is not in operation, and
below -10 C° when the gyrocompass is in operation, the gyrosphere container is to
be removed from the compass housing and stored at a place where the ambient
temperature will not fall below 0 °C.
If no storage place is available where the ambient temperature will not fall below 0 °C,
the gyrosphere is to be removed from the gyrosphere container to prevent damage
caused by frozen supporting fluid.
The gyrosphere may be removed by personnel of an authorized C. PLATH service
station only.
2 OPERATION
2.1 Display and Control Elements
DISPLAY DATA GYRO 1
HEADING TRUE 271.3°
ROT 1.2 °/MIN
CORR. OFF
....
.. .
. ..... .. .
. ..........
GYROCOMPASS
RESET
DIM –
F2
ENTER
DIM +
F3F1
MENU
SHIFT
LCD screen
4 x 20 characters, alphanumerical
control keys
direct functions:
Menu, ,, Dim-, Dim+
via shift-key:
F1, F2, F3, Reset, Enter
NAVIGAT X Mk 1 / SR-180 Mk 1
control and display unit

Page 2-02
NAVIGAT X MK 1 Mod. 10 / SR-180 MK 1 Mod. 10 056310
3-149 MK110ENG.P65
2.3 Operation
2.3.1 Power-up Sequence
Energize the gyrocompass system.
MKI User Pane
Version: 1.1
....................
... . . ...
... ... ...
C.PLATH
NAVIGAT X MK.1
.... .........
....................
... . . ...
>F1 GYRO 1 271.3°
F2 GYRO 2 271.2°
F3 MAGN.C. 270.9°
DIFF G1/G2 3.2° þ
. . .. ..
.. ... ..
.. . ..
. . ... .
1 2 3
1) The control and display unit performs self-test and takes up operation.
2) The control and display unit displays the masterboard status message.
3) The gyrocompass system enters normal operational mode.The startup screen
is displayed, showing heading data from the connected compasses and the
heading difference alarm threshold.
2.3.2 Heading Reference Source Selection
From the startup screen, the operator may select one of the available heading sources
as the reference for the devices connected to the gyrocompass system (e.g. autopi-
lot, repeaters etc.).
Internal Selection (standard)
41Press keys simultaneously to select gyro 1.
42Press keys simultaneously to select gyro 2 (if available).
43Press keys simultaneously to select magnetic compass (if available).
External Selection (optional)
Use the external selector switch to select the heading reference.
Note: Heading reference selection is permitted in manual steering mode only. If
steering in autopilot mode, source selection is disabled.
2.3.3 Display Illumination
6Press key. The display becomes brighter.
5Press key. The display becomes darker.
2.3.4 Confirm Alarm / Mute Alarm Buzzer
41On alarm, press keys to confirm the alarm and clear the alarm message
from the display screen. The alarm buzzer is muted simultaneously. If the
cause of an alarm is eliminated, a pending alarm message is automatically
cleared from the display and the buzzer muted.
45On alarm, press keys to mute the alarm buzzer.

Page 2-03
NAVIGAT X MK 1 Mod. 10 / SR-180 MK 1 Mod. 10 056310
3-149 MK110ENG.P65
2.3.5 Menu Operation
The data display screens and the manual settings, user and service setup modes are
accessible via a multilevel operating menu.
entering / quitting the main menu
1/3from startup screen, press to go to
main menu screen.
2from main menu screen, press to re-
turn to startup screen.
navigating the menu
41
42go to sub-menu
43
1return to next higher menu level
3/2go to next/previous screen on same
menu level
selecting parameter settings
flashing arrows: selection expected
2/3show next/previous option
46 select option and go to next line
entering data
flashing cursor: data input expected
2/3increase/decrease input value
6/5move cursor forward/back
46 confirm input and go to next line
45 clear input (value is set to zero)
.... . ....
.......
......... ...
MAN SETTINGS
SPEED LAT CORR
ON
.... . ....
.......
......... ...
MAN SETTINGS
SPEED LAT CORR
ON
..
þ.ý.
.... . ....
............ .......
.....
MAN SETTINGS
MAGN. VAR. .0° E
ÿ
ÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿ
ÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿ
ÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿ
ÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿ
ÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿ
ÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿ
ÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿ
ÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿ
ÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿ
ÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿ
ÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿ
ÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿ
ûÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿ
ÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿ
ÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿ
ÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿ
MENU
➔
➔
/
ü
ÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿ
ÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿ
ÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿ
ÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿ
F2
F1
F3
higher menu level lower menu level
>F1 GYRO 1 271.3°
F2 GYRO 2 271.2°
F3 MAGN.C. 270.9°
DIFF G1/G2 3.2° þ
. . .. ..
.. ... ..
.. . ..
. . ... .
MAIN MENU û
F1 DISPLAY DATA
F2 MANUAL SETTINGS
F3 SETUP MENU
..... . .....
. . . ....
.. . .
. . . ......
➔
MENU
➔
/
Page 2-04
NAVIGAT X MK 1 Mod. 10 / SR-180 MK 1 Mod. 10 056310
3-149 MK110ENG.P65
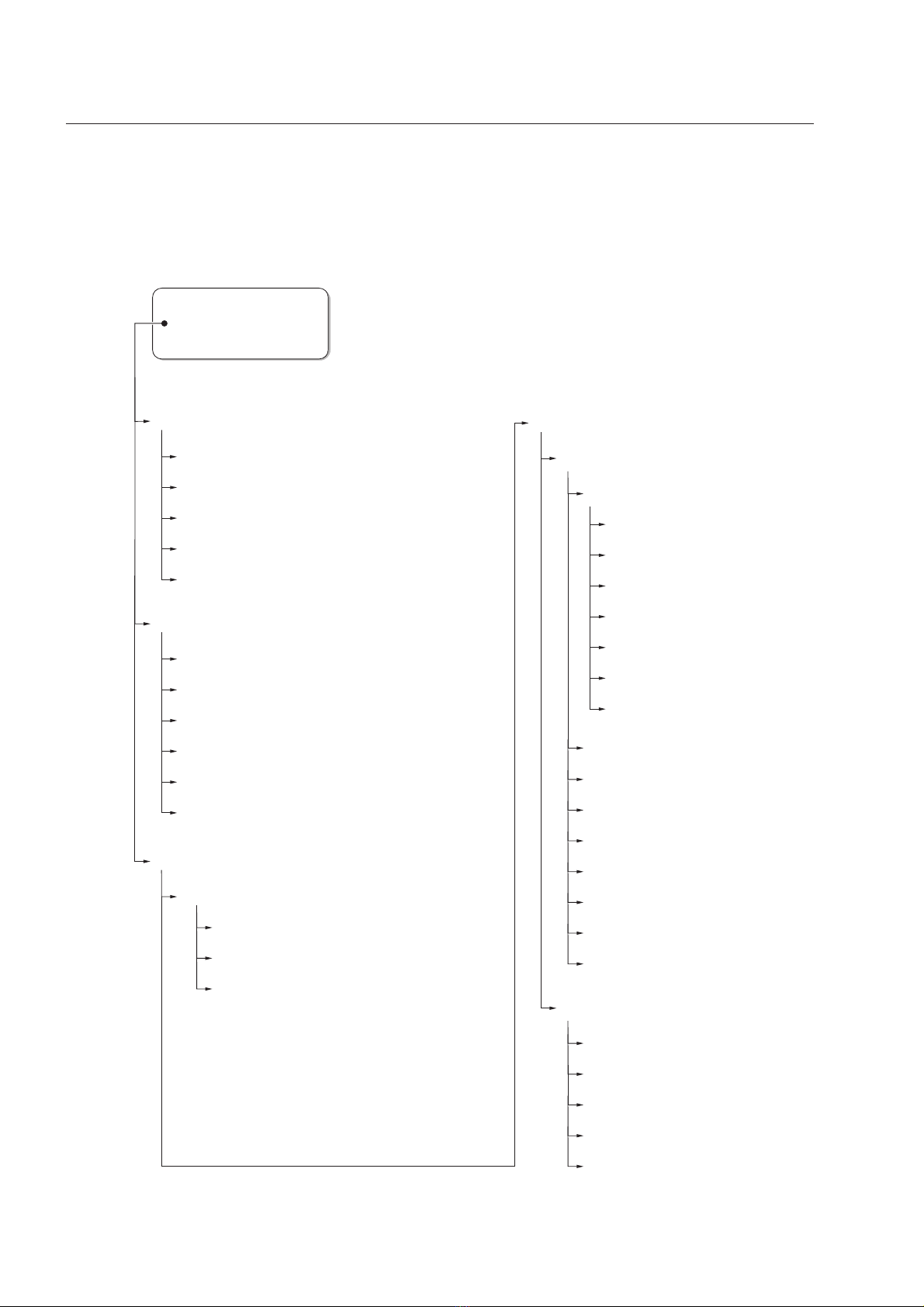
2.3.6 Menu Structure
MAIN MENU
F1 DISPLAY DATA
F2 MANUAL SETTINGS
F3 SETUP MENU
..... . ......
. . . ....
.. . .
. . . ......
DISPLAY DATA
GYROCOMPASS
MAG. COMPASS
POSITION
SPEED
DATE/TIME
SERVICE SETUP 2
GYROSPHERE DATA
OP. TIME COUNTER
DATA LIST
ERROR LIST
RESET MK 1
MANUAL SETTINGS
SPEED/LATITUDE
HDG DIFF. ALARM
MAGNETIC VARIATION
NORTH SP.ERR.CORR
SET.NAVIPRINT
SETTINGS ROT
TEST MODE
NAME OF GYRO
INTERFACE I/O
ANALOG. ROT OUTP.
FEEDBACK SIGNAL
SYSTEM TYPE
ALIGN ERR. CORR.
EXT. STATUS IN
NMEA SUPERFAST
TxD NMEA FAST
GYRO INPUT
MAG HDG INP.
SPEED INPUT
POS INPUT
SENS.D.M.OUTP
SERVICE SETUP 1
SHAFT COR. ANGLE
MAG. C. CAL. TABLE
USER SETUP
DATE/TIME
SOFTWARE VERSION
SETUP MENU
SERVICE SETUP

Page 2-05
NAVIGAT X MK 1 Mod. 10 / SR-180 MK 1 Mod. 10 056310
3-149 MK110ENG.P65
2.3.7 Display Data Selection
The "Display Data" menu provides access to the data display screens. The selected
display screen remains active until the user selects a different screen or quits the
display data menu.
Display data screens
DISPLAY DATA GYRO 1
EADING TRUE 271.3°
ROT 1.2 °/MIN
CORR. OFF
....
.. .
. ..... . ..
. ...........
Gyrocompass data
- gyrocompass heading
- rate of turn
- correction status (on / off)
DISPLAY DATA GYRO 1
EADING MAGN 270.9°
MAGN.VAR. 2.3° E
....
.. .
..... .
....................
Magnetic compass data (M-System types only)
- magnetic compass heading
- magnetic variation
DISPLAY DATA GYRO 1
POSITION AUTO
LAT 44.09.46 N
LON 023.54.21 E
....
.... . ..
... .. . ..
... . . ..
Position data
- position data source (auto /man)
- latitude
- longitude
DISPLAY DATA GYRO 1
SPEED AUTO
12.3 kt
....
..... . .....
....... . ......
....................
Speed
- speed data source (auto / man)
- actual speed
DISPLAY DATA GYRO 1
DATE 23.01.98
TIME 12.34
....
.. . .....
.. .... .....
....................
Date / Time
- current date
- current time
23
23
23
23

Page 2-06
NAVIGAT X MK 1 Mod. 10 / SR-180 MK 1 Mod. 10 056310
3-149 MK110ENG.P65
2.3.8 Optional Functions (available if relevant equipment installed)
Ext. Alarm Acknowledge
Mutes the alarm buzzer from a remote facility (e.g. a central alarm panel). The alarm
message remains on the display screen until the alarm is confirmed.
Turn Heading Display 180°
Turns the heading display by 180° (e.g. for operation in ferries). Actuated by external
selector switch.
Analogue Rate of Turn Display Damping
Turns damping of the analogue rate of turn output on/off. Actuated by external selec-
tor switch.
Watch Alarm Trigger Output
Activates the watch alarm trigger relais for 100 msec. Actuated by pressing any key
on the control and display unit.
2.3.9 North Speed Error Correction
The NAVIGAT X Mk 1 gyrocompass system provides automatic correction of the
north speed error. If correction is active, the system permanently calculates the north
speed error from the current speed and position and corrects the gyrocompass head-
ing data accordingly.
The north speed error δarises from the combination of the ship's speed with the
rotation of the earth. Depending upon the latitude and the vessel's speed and direc-
tion, the heading indicated by an uncorrected gyrocompass deviates from the true
heading by the north speed error δ.
The mathematical formula for the north speed error δis:
sin = –δ904 · cos ϕ
v
· cos hdg.
()
where: v = speed (kts.)
ϕ= latitude
904 = rotational speed of the earth (kts.)
As a reference, a set of error tables is provided at the back of this manual which give
the north speed error δ of an uncorrected gyrocompass at different headings, speeds
and latitudes.

Page 2-07
NAVIGAT X MK 1 Mod. 10 / SR-180 MK 1 Mod. 10 056310
3-149 MK110ENG.P65
2.4 Manual Settings
2.4.1 Speed/Latitude Input for Automatic Error Correction
input mode (speed/lat mode)
Settings: speed mode man = manual speed input
auto = automatic speed input
lat mode man = manual position input
auto = automatic position input
Function: Selects between automatic/manual input of the actual speed and lati-
tude respectively. In order for automatic north speed error correction to
work, valid speed and latitude data must be available to the system. If
possible, automatic data input should be used.
Note: If manual input mode is selected, no speed/position data is sent to the
data outputs.
manual input speed/latitude
Settings: speed: 0 – 99.9 kts.
latitude: 90:00.00 N – 90:00.00 S
Function: Enters speed/position data manually.
Note: If speed and/or position are entered manually, the relevant data must
be continuously updated according to the prevailing conditions. Manual
speed input should be accurate to at least 1 kt., manual latitude input
should be accurate to at least 1°.
2.4.2 Heading Difference Alarm Threshold
Settings: GY1/GY2 = monitors gyro 1 / gyro 2
GY1/Mag = monitors gyro 1 / magnetic compass
GY2/Mag = monitors gyro 2 / magnetic compass
OFF = no monitoring
alarm threshold: 0 – 99°
Function: Selects the heading sources to be monitored and sets the heading
difference alarm threshold. If the difference between the heading data
from the monitored compasses exceeds the set threshold, the heading
difference alarm relay is actuated. Simultaneously, an error message is
displayed and an audible alarm given.
Note: The heading difference alarm function is not available if the system
type is G.

Page 2-08
NAVIGAT X MK 1 Mod. 10 / SR-180 MK 1 Mod. 10 056310
3-149 MK110ENG.P65
2.4.3 Magnetic Variation
Settings: 99.9° W – 99.9° E
Function: Sets the magnetic variation for the vessel's area of operation.The mag-
netic compass heading data is automatically corrected according to
the set variation. The applicable value for the magnetic variation is to
be taken from the sea chart relevant to the area in question.
Note: Check for the sea chart's date of issue and apply annual changes of
the magnetic variation, if necessary. The setting of the magnetic varia-
tion is not available if the compass system type is G or GG.
2.4.4 North Speed Error Correction
Settings: ON = automatic correction active
OFF = no automatic correction
Function: Turns the automatic north speed error correction on or off. If automatic
north speed error correction is active, the system permanently calcu-
lates the north speed error from the current speed and position and
corrects the gyrocompass heading data accordingly.
Automatic north speed error correction should be active at any time.
If possible, automatic speed and position input should be used.
Note: If manual speed and/or position input is selected, the relevant data
must be continuously updated according to the prevailing conditions.
Manual speed input should be accurate to at least 1 kt., manual lati-
tude input should be accurate to at least 1°.
2.4.5 Voyage Data Printer (Set. NAVIPRINT)
Settings: ON = output to printer active
OFF = no output to printer
paper feed speed: 60 mm/h / 150 mm/h / 600 mm/h
heading scale: ±30° / ±180°
rudder scale: ±9° / ±45° / ±70° / OFF
Function: Sets the parameters for the printout to a C. PLATH voyage data printer
NAVIPRINT. "ON" turns on printing, using the set parameters for paper
speed, heading and rudder scales. "OFF" turns off printing.
Note: The voyage data printer may be connected to different C. PLATH equip-
ment (autopilots, compass systems, compass monitor, digital repeater).
The printing parameters can only be set from the device the printer is
directly connected to.
After any interruption of power, the compass system's internal clock
must be reset in the user setup, in order for time and date to appear
correctly on the printout.

Page 2-09
NAVIGAT X MK 1 Mod. 10 / SR-180 MK 1 Mod. 10 056310
3-149 MK110ENG.P65
2.4.6 Rate Of Turn Damping Time Constant / Alarm Threshold (Settings ROT)
damping time constant
Settings: 0 - 99 s
Function: Sets the damping time constant for the analogue rate-of-turn output.
The larger the constant, the stronger sudden peaks of the output volt-
age are damped. Damping is turned on/off by an external selector switch.
Note: Damping is effective for the analogue rate of turn output only. The dig-
ital display and the serial outputs always put out undamped rate of turn
data.
alarm threshold
Settings: 0 – 6000°/min
Function: Sets the threshold value for the maximum rate of turn alarm. If the
actual rate of turn exceeds the set value, the rate of turn alarm relay is
actuated. Simultaneously, an alarm message is displayed and an audi-
ble alarm given.

Page 2-10
NAVIGAT X MK 1 Mod. 10 / SR-180 MK 1 Mod. 10 056310
3-149 MK110ENG.P65
2.4.7 Manual Settings – Overview
NORTH SP.ERR.CORR
ON
OFF
MAGNETIC VARIATION
99.9° W – 99.9° E
SPEED/LATITUDE
SPEED/LAT MODE
SPEED/LAT SET
SPEED MODE
POSIT MODE
90:00.00 N – 90:00.00 S
0–99.9kts.
AUTO
MAN
AUTO
MAN
HDG DIFF. ALARM
GY1/GY2
GY1/MAG
GY2/MAG
OFF
0–99°
SET. NAVIPRINT
PAP. SPD.
60 mm
150 mm
600 mm
HDG
30°
180°
RUD
9°
45°
70°
OFF
ON
OFF
NAVIPRINT
SETTINGS ROT
TIME CONST. ROT
MAX. VALUE ROT
0–99sec.
0 – 9999°/min
MAN.SETTINGS GYRO 1
F1 SPEED/LATITUDE
F2 DG DIFF.ALARM
F3 MAG. VARIATION þ
...
.. ..
.. . ..
.. . .
MAN.SETTINGS GYRO 1û
F1 NORT SP.ERR.CORR
F2 SET. NAVIPRINT
F3 SETTINGS ROT
..
..
.. .
..
settings for voyage data printer
north speed error correction
time const. / alarm threshold
rate of turn
heading difference alarm
threshold
data input for automatic
error correction
magnetic variation
23
This manual suits for next models
1
Table of contents
Popular Marine Equipment manuals by other brands







FLIR
FLIR Raymarine SiriusXM SR200 installation instructions

Rockford Fosgate
Rockford Fosgate Punch PMX-OR Installation & operation

Kongsberg
Kongsberg Simrad CS90 Reference manual

Furuno
Furuno Network Sounder DFF3 Operator's manual

Furuno
Furuno FCV-1500 installation manual

Lars Thrane
Lars Thrane LT-3100 User & installation manual

Raymarine
Raymarine St290 Quick reference guide

Kongsberg
Kongsberg Simrad EK80 quick start guide

Simrad
Simrad Navico WP10 manual

Side-Power
Side-Power Stabilizer Operation and user's guide

MOFLASH SIGNALLING
MOFLASH SIGNALLING SB150-1 Series INSTALLATION & TECHNICAL INFORMATION

Bennett
Bennett LNG Series installation manual