CENTENT COMPANY
iii
CONTENTS
GENERAL DESCRIPTION ...................................................................................1
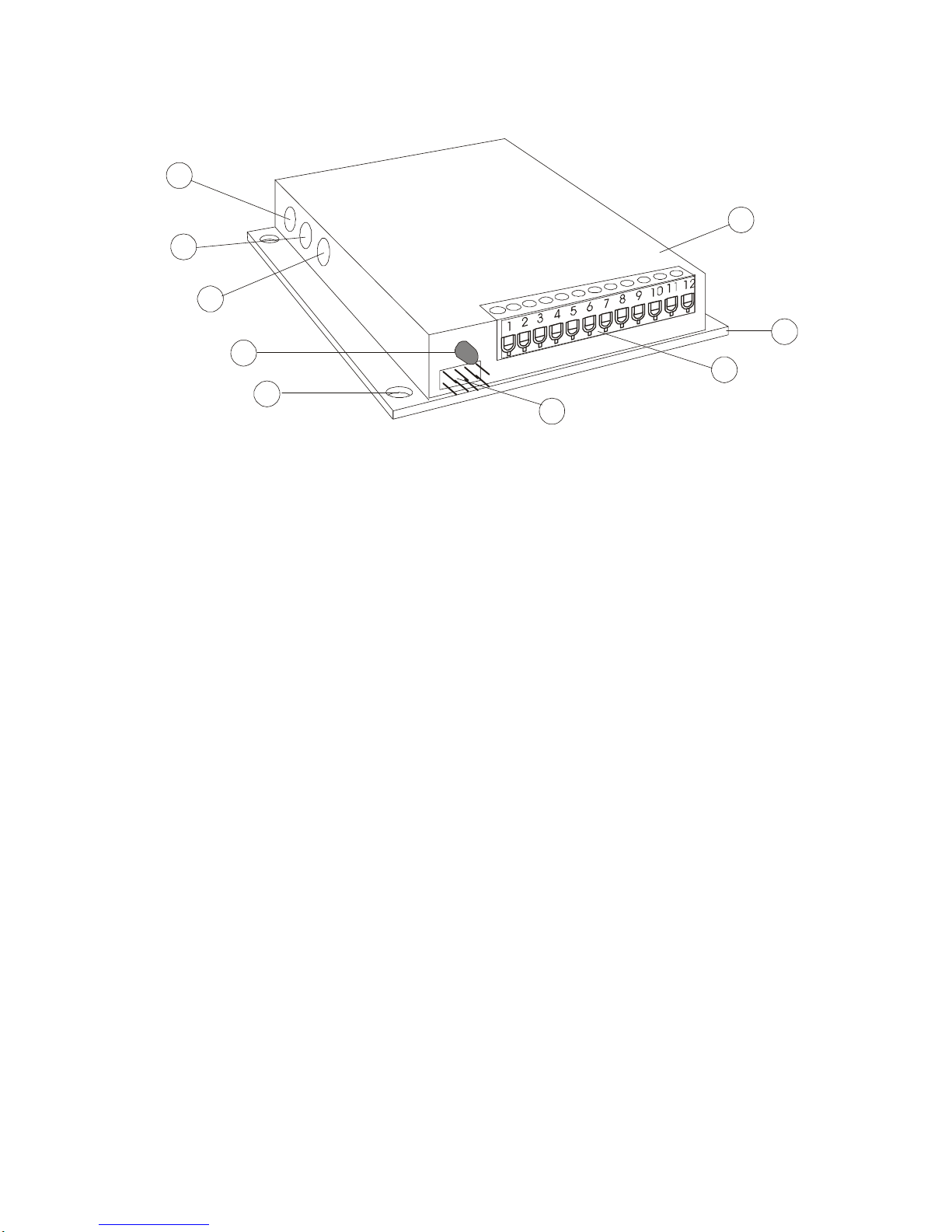
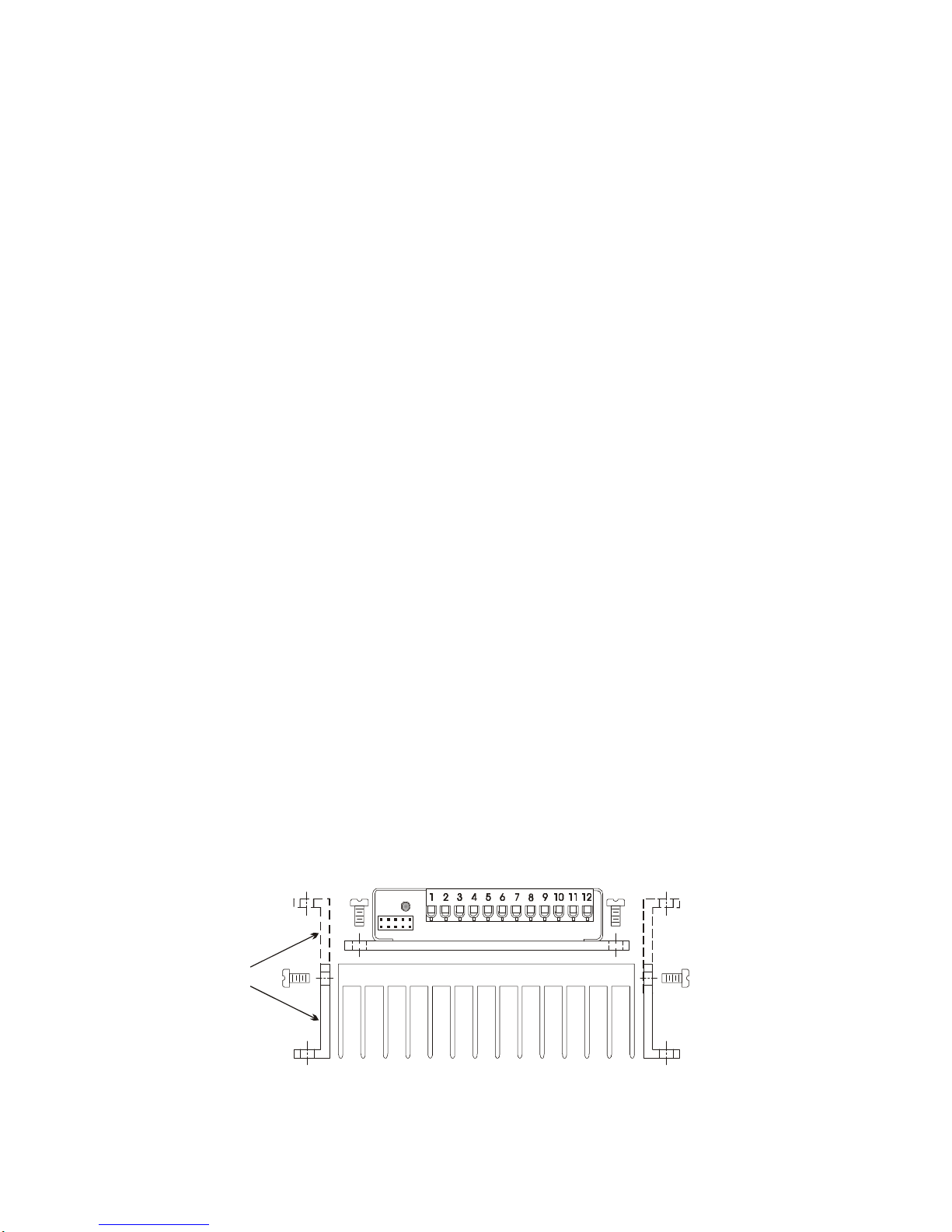
LOCATION OF COMPONENTS..........................................................................2
GETTING STARTED.............................................................................................. 3
QUICK SETUP........................................................................................................3
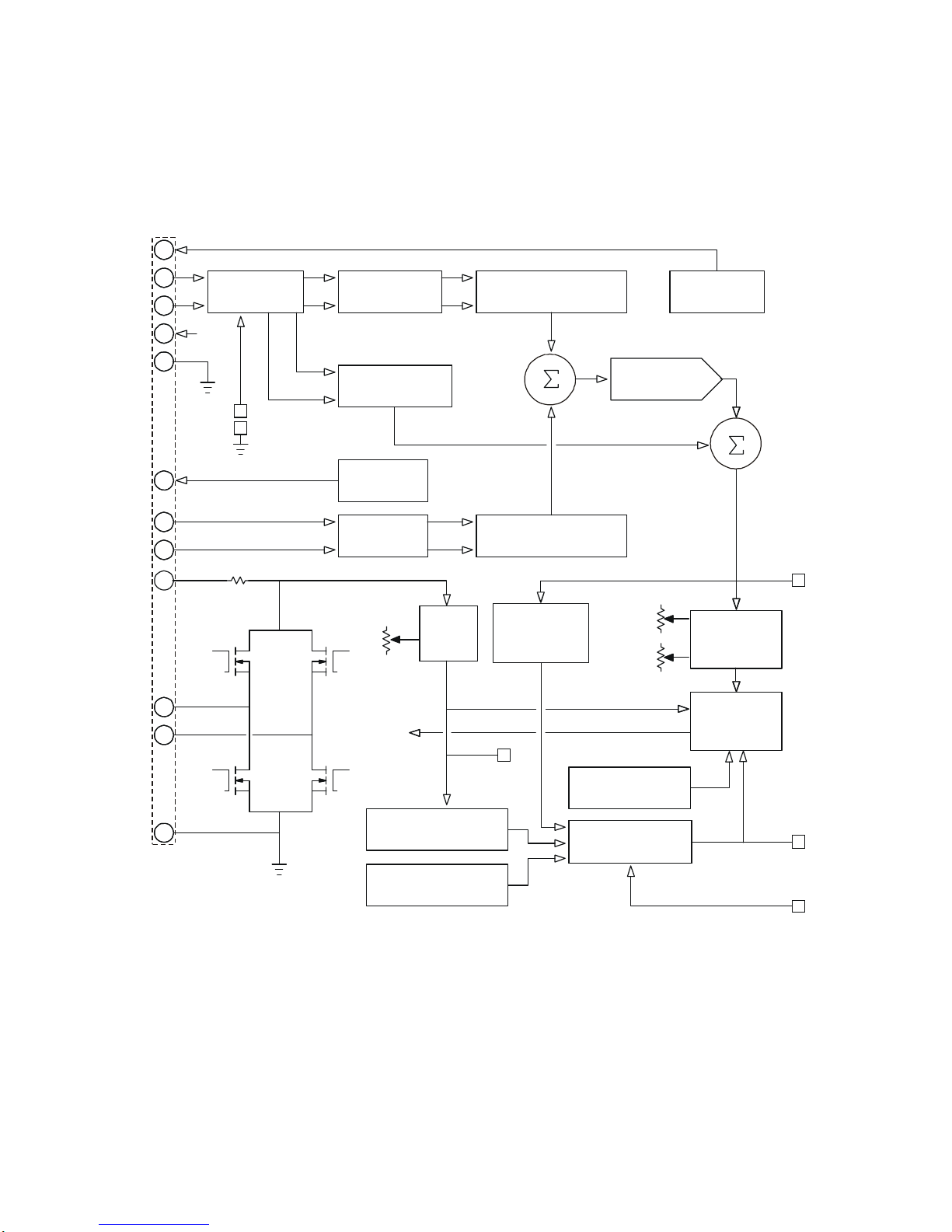
THEORY OF OPERATION...................................................................................4
Main Elements..................................................................................................... 4
Auxiliary Elements ..............................................................................................5
Current Limit ........................................................................................................7
Protection Circuits............................................................................................... 8
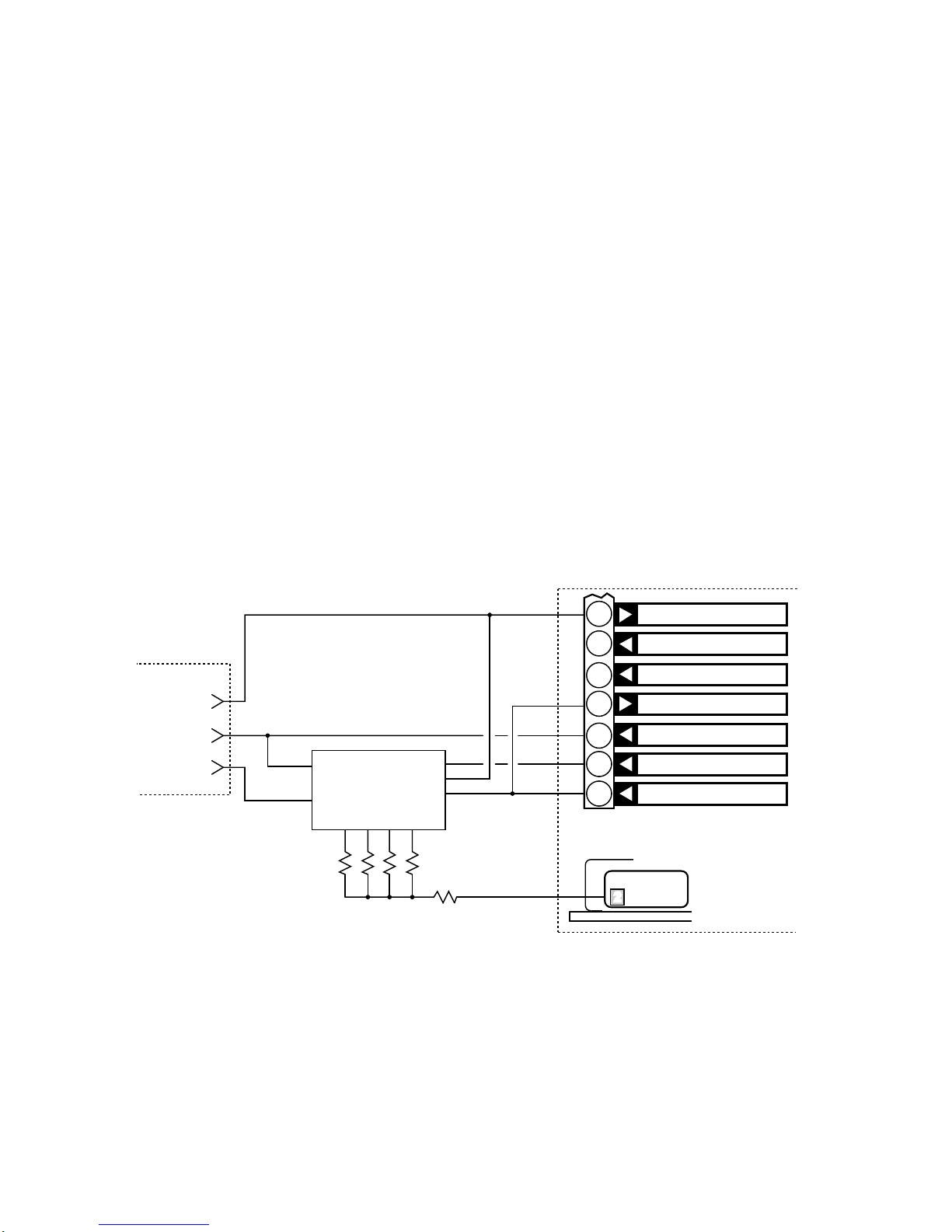
TERMINAL BLOCK FUNCTIONS
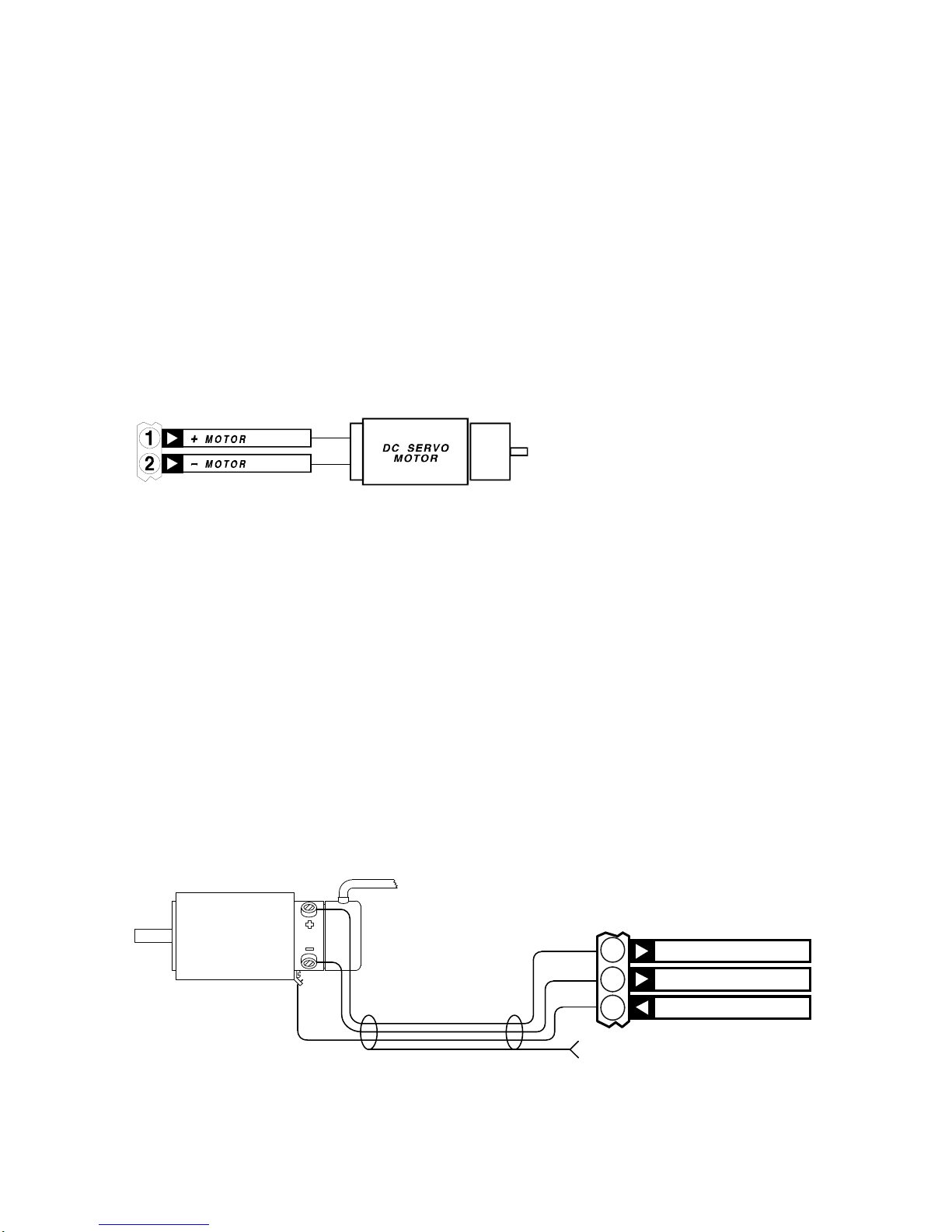
Motor Group.......................................................................................................10
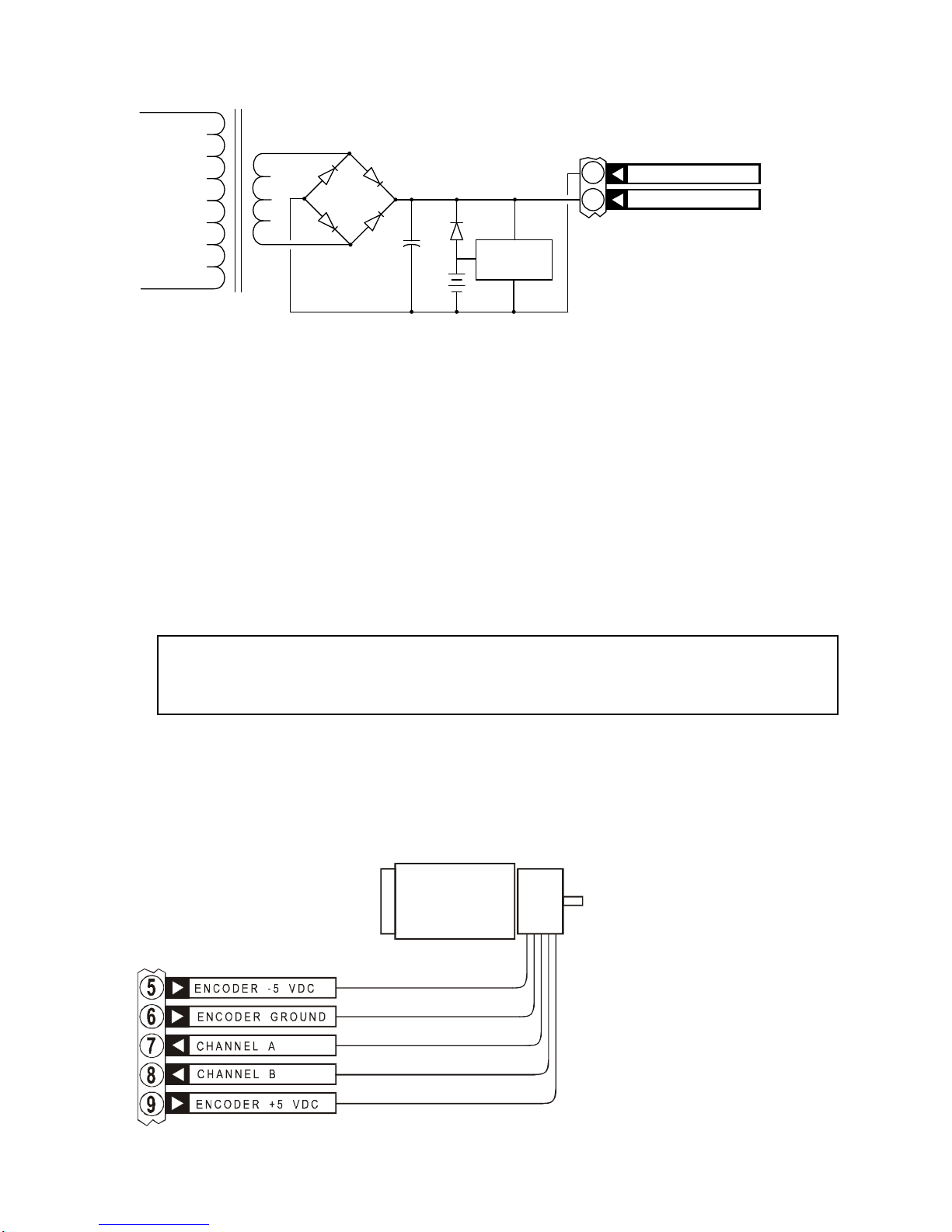
Power Supply Group ........................................................................................11
Encoder Group.................................................................................................. 12
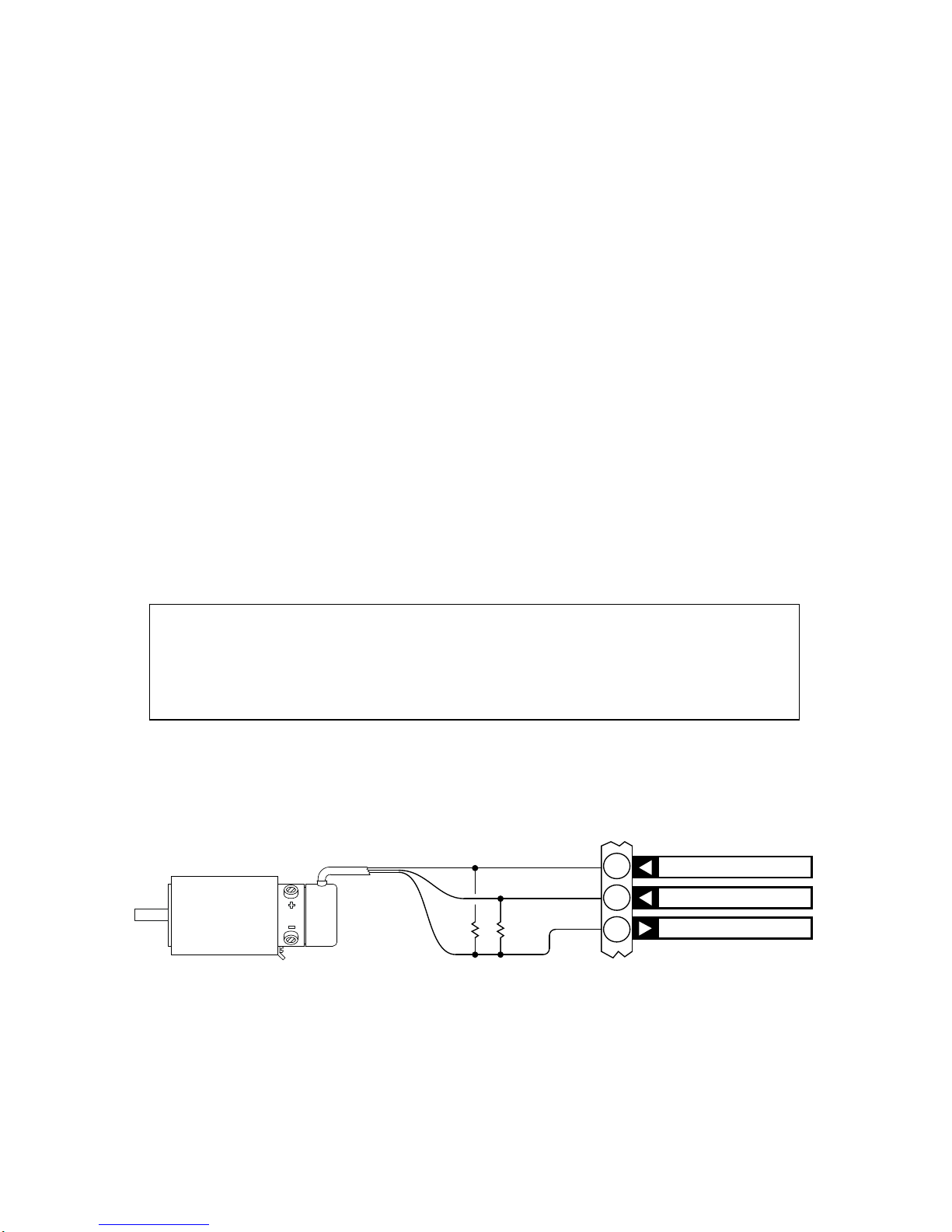
Sine-Cosine Encoders................................................................................................14
TTL Encoders ..............................................................................................................14
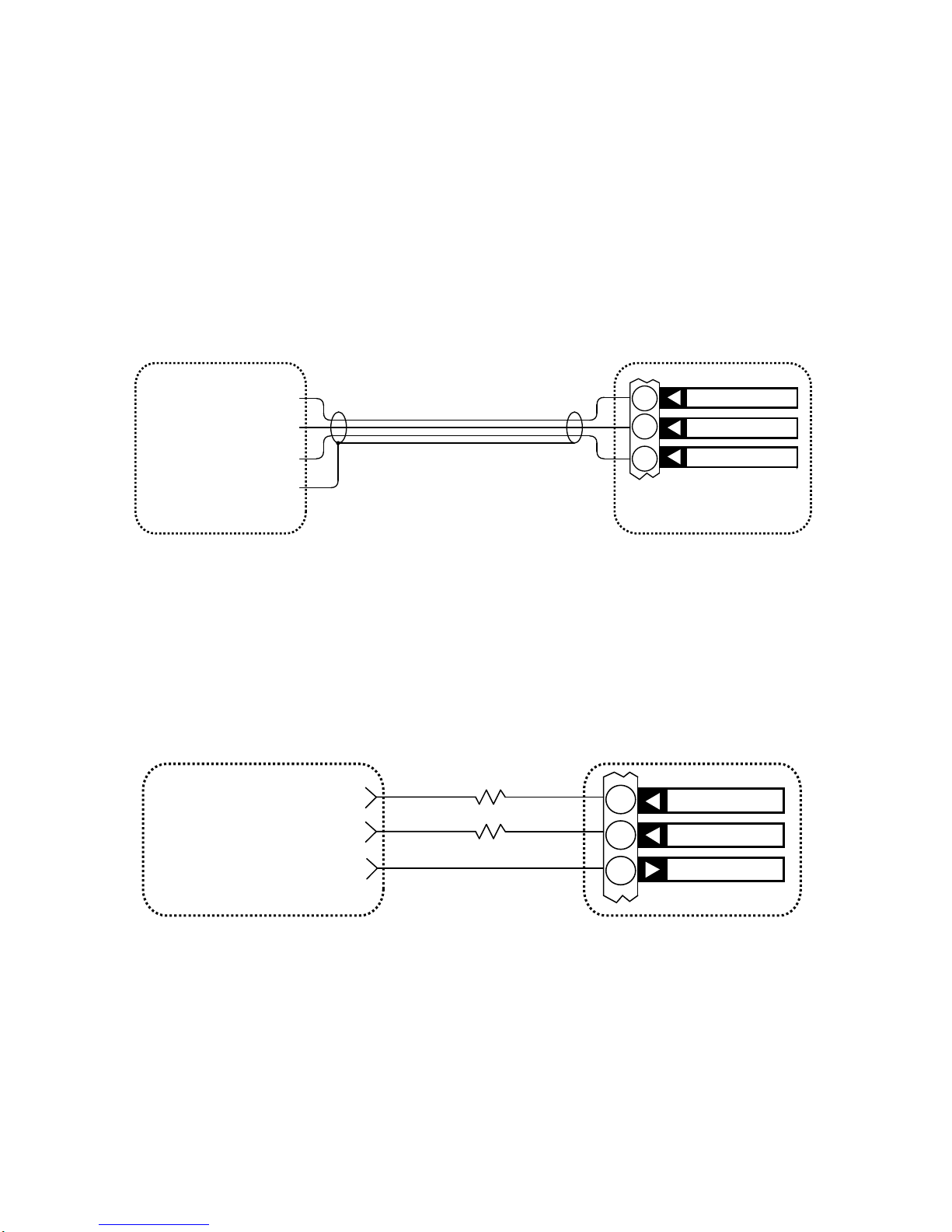
Command Group............................................................................................... 15
OPTION HEADER................................................................................................ 17
System Inertia....................................................................................................17
Position Error..................................................................................................... 18
+2.5V Reference...............................................................................................18
Current Monitor ................................................................................................. 18
Fault Output....................................................................................................... 19
Reset Input.........................................................................................................20
+12 Volt Test...................................................................................................... 20
Encoder Jumper................................................................................................ 20
Ground................................................................................................................ 20
TUNING THE CN0182 SERVO DRIVE
Current Trimpot................................................................................................. 21
Gain Trimpot......................................................................................................22
Damping Trimpot...............................................................................................22
Integral Coefficient............................................................................................ 23
Servo Loop Tuning ...........................................................................................23
Interpreting Figure 12 – Optimum Damping.................................................. 27
Picking A Motor................................................................................................. 27
Motor Fundamentals......................................................................................... 28
SPECIFICATIONS................................................................................................31
FULL SCALE DRAWING....................................................................................32