KAD/ADC/129/S2
9
1 Jun. 2021 | DST/V/081
CURTISSWRIGHT.COM
The DC error specification is checked as a differential input, so it does not include loading by RADJ which causes an additional
gain error.
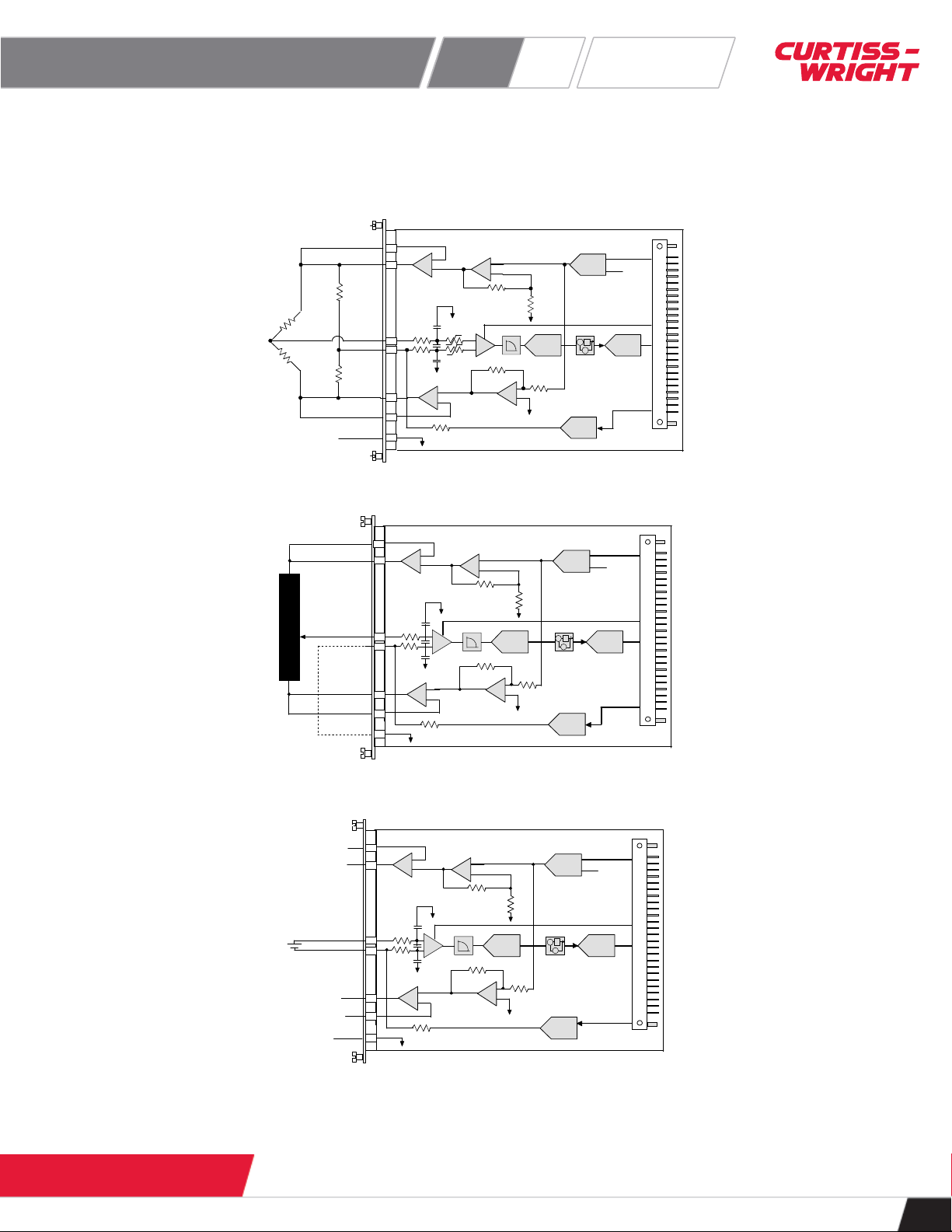
In the previous figure, the gain error only occurs when the active leg of the bridge is connected to ANALOG(x)-. In this situation,
ANALOG(x)- is loaded by RADJ, forming a resistor divider with the resistance of bridge visible from the ANALOG(x)- input.
The gain error on ANALOG(x)- input can be quantified as follows:
where RP = R2 in parallel with R4
This additional gain error depends on the resistance of the bridge and can be typically -0.5% for a 350Ω bridge with its active leg
connected to ANALOG(x)-, and -0.172% for a 120Ω bridge.
In the case of a full-bridge with two active legs, only one leg of the bridge is affected. Therefore the gain error of voltage across
the bridge is half of the above quoted figures, that is, -0.25% for a 350Ω bridge.
For a symmetrical input range, the error can be expressed as %FSR error by further dividing the value by two, yielding to
±0.125% FSR for a 350Ω bridge.
Note that the gain error due to RADJ does not apply when:
•using a wheatstone bridge with the active elements (typically strain gages) placed only on the leg of the bridge connected to
ANALOG(x)+
•the leg of the bridge connected to ANALOG(x)- is populated with completion resistors (half-bridge with completion resistors)
•using only differential ended inputs with signal source isolated from module ground
•using only inputs in single ended configuration, connecting the signal to ANALOG(x)+ (ANALOG(x)- must be connected to
ground). This data sheet shows an example potentiometer application, which is not affected by this gain error.
Modules with RADJ connected externally might show this additional gain error offset but only if the balance adjust circuit is used
and in the cases stated previously.
NOTE: Gain error can be compensated at post processing, as the nominal resistance of the bridge is known.
Understanding filter delays
The Acra KAM-500 uniquely samples all signals at the start of an acquisition cycle and at equal intervals of time thereafter.
Signals sampled at the same sample rate will always be sampled at the same time independently of how they are stored or
transmitted. (This has significant advantages for issues such as time correlation.) However, before signals are sampled they are
filtered to remove noise components that might alias. The recommended cutoff point is one quarter the sampling frequency, as
this results in the maximum filtering of aliasing frequencies.
The Acra KAM-500 filters signals using over-sampling signal processing techniques. The figure below shows a delay for an 8th
order filter where fc = 1kHz. All filters cause a delay inversely proportional to the filter cutoff frequency (fc), so to calculate the
delay for other fc values, multiply the delay by (1kHz / fc). The frequency axis then needs to be rescaled to the new fc by dividing
the frequency values by (1kHz / fc). For example, an 8th order Butterworth filter with an fc of 1kHz delays a 1kHz signal by 1ms; a
filter with an fc of 10Hz delays a 10Hz signal by 0.1s. The delay for IIR filters (for example Butterworth) varies with the input
frequency.
%100
adjP
P
RR
R
Error