DS1820
021497 10/27
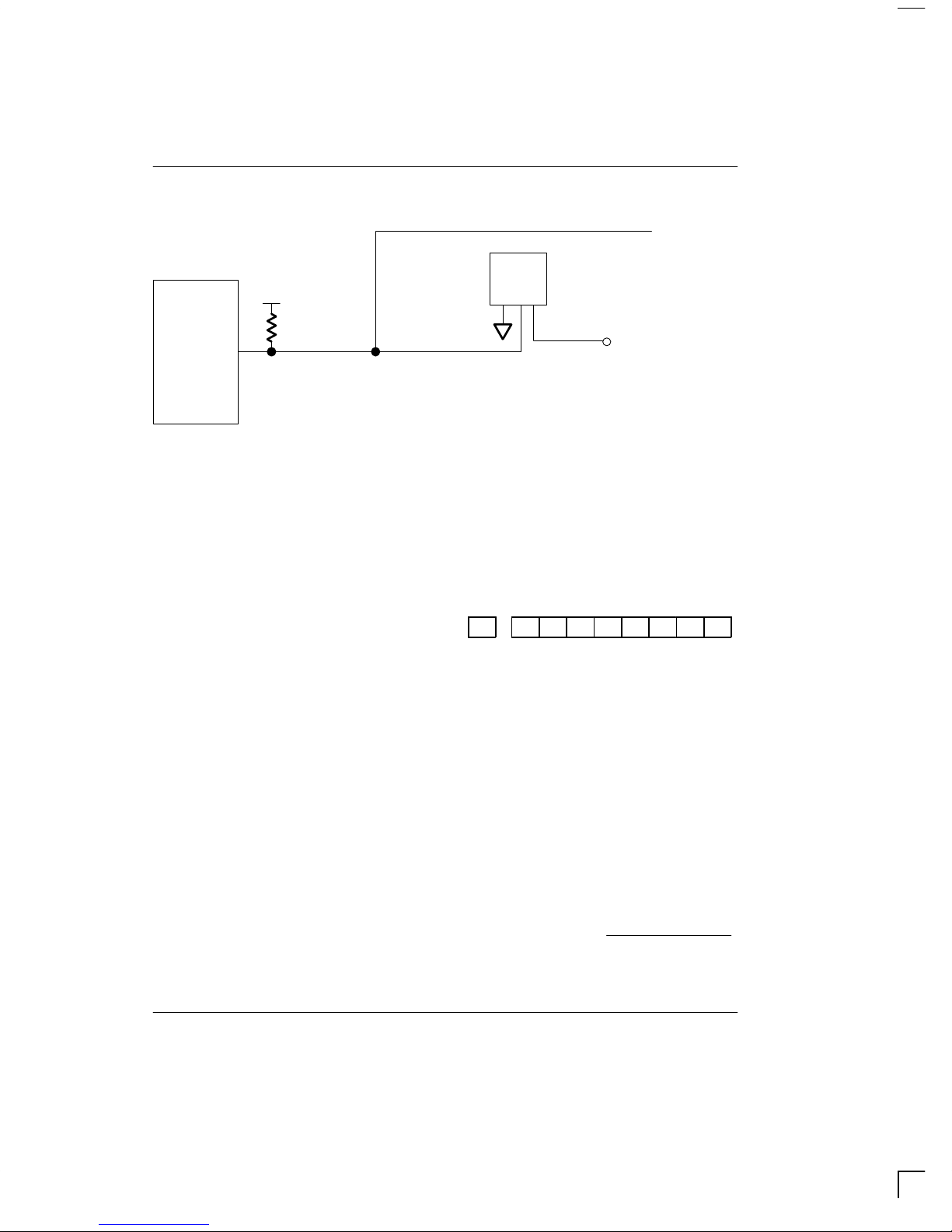
Read ROM [33h]
This command allows the bus master to read the
DS1820’s 8–bit family code, unique 48–bit serial num-
ber, and 8–bit CRC. This command can only be used if
there is a single DS1820 on the bus. If more than one
slave is present on the bus, a data collision will occur
when all slaves try to transmit at the same time (open
drain will produce a wired AND result).
Match ROM [55h]
The match ROM command, followed by a 64–bit ROM
sequence, allows the bus master to address a specific
DS1820 on a multidrop bus. Only the DS1820 that
exactlymatchesthe64–bitROMsequencewillrespond
to the following memory function command. All slaves
thatdonotmatch the 64–bitROMsequencewillwaitfor
a reset pulse. This command can be used with a single
or multiple devices on the bus.
Skip ROM [CCh]
This command can save time in a single drop bus sys-
tem by allowing the bus master to access the memory
functions without providing the 64–bit ROM code. If
more than one slave is present on the bus and a read
command is issued following the Skip ROM command,
data collision will occur on the bus as multiple slaves
transmit simultaneously (open drain pulldowns will pro-
duce a wired AND result).
Search ROM [F0h]
When a system is initially brought up, the bus master
might not know the number of devices on the 1–Wire
bus or their 64–bit ROM codes. The search ROM com-
mandallowsthebusmastertouseaprocessofelimina-
tiontoidentifythe64–bitROMcodesofallslavedevices
on the bus.
Alarm Search [ECh]
TheflowchartofthiscommandisidenticaltotheSearch
ROM command. However, the DS1820 will respond to
this command only if an alarm condition has been
encountered at the last temperature measurement. An
alarmconditionis defined asa temperature higherthan
THorlowerthanTL. Thealarmconditionremainssetas
longastheDS1820is poweredup,oruntilanothertem-
perature measurement reveals a non–alarming value.
For alarming, the trigger values stored in EEPROM are
taken into account. If an alarm condition exists and the
TH or TL settings are changed, another temperature
conversionshouldbe done to validate anyalarm condi-
tions.
Example of a ROM Search
The ROM search process is the repetition of a simple
3–step routine: read a bit, read the complement of the
bit,thenwritethedesiredvalueofthatbit.Thebus mas-
ter performs this simple, 3–step routine on each bit of
the ROM. After one complete pass, the bus master
knows the contents of the ROM in one device. The
remainingnumberofdevicesandtheirROMcodesmay
be identified by additional passes.
The following example of the ROM search process
assumes four different devices are connected to the
same 1–Wire bus. The ROM data of the four devices is
as shown:
ROM1 00110101...
ROM2 10101010...
ROM3 11110101...
ROM4 00010001...
The search process is as follows:
1. Thebusmasterbeginstheinitializationsequenceby
issuinga reset pulse. The slavedevices respond by
issuing simultaneous presence pulses.
2. The bus master will then issue the Search ROM
command on the 1–Wire bus.
3. The bus master reads a bit from the 1–Wire bus.
Each device will respond by placing the value of the
firstbitoftheirrespectiveROMdataontothe1–Wire
bus. ROM1 and ROM4 will place a 0 onto the
1–Wire bus, i.e., pull it low. ROM2 and ROM3 will
placea 1 ontothe 1–Wire bus by allowingthe lineto
stayhigh. TheresultisthelogicalANDofalldevices
on the line, therefore the bus master sees a 0. The
bus master reads another bit. Since the Search
ROM data command is being executed, all of the
devices on the 1–Wire bus respond to this second
readbyplacingthecomplementofthefirstbitoftheir
respective ROM data onto the 1–Wire bus. ROM1
and ROM4 will place a 1 onto the 1–Wire, allowing
the line to stay high. ROM2 and ROM3 will place a
0ontothe1–Wire, thus it will bepulledlow. Thebus
masteragainobservesa0forthecomplementofthe
first ROM data bit. The bus master has determined
that there are some devices on the 1–Wire bus that
have a 0 in the first position and others that have a 1.