The Dolomite Centre Ltd.
3600051 - P-Pump API - programming instructions - v 1.3 Page 5 of 15
Issuing another control pressure command sets a new target but the pump stays in the CONTROL
state.
If your application issues a control pressure command when the pump is in any other state, the
command will be rejected and the pump will continue its current operation.
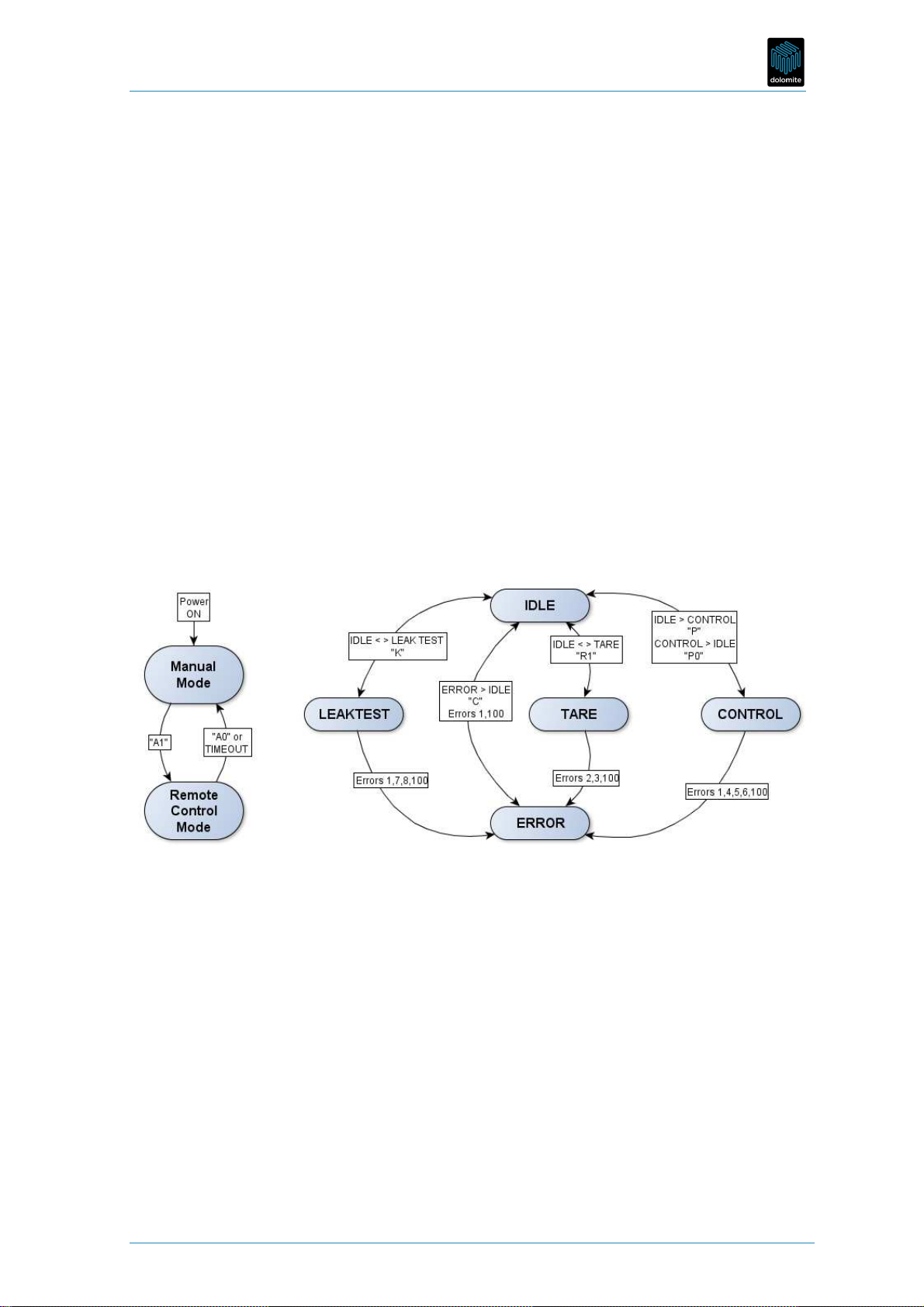
5.1.3 TARE (State: 2)
Your application should issue a “tare” command only when the status is IDLE. If the pump is in
any other state the command will be rejected. The pump automatically moves back to the IDLE
state when taring is complete.
During the tare operation, your application may see the TARE state, but that will depend on the
frequency of communication. Once the TARE is complete, any subsequent request for status
from the pump will only return IDLE or ERROR.
5.1.4 ERROR (State: 3)
The pump can get into the ERROR state from any other state if an error condition arises. The only
state to which the pump can move from ERROR is IDLE. To clear the ERROR state (move back to
IDLE the following conditions must be met:
•
The cause of an error must cease: you cannot clear the ERROR state unless the error
condition has been removed.
•
Your application must clear the ERROR state by explicitly sending a “C” command. This
ensures your application cannot "miss" any errors.
5.1.5 LEAKTEST (State: 4)
You can leak test the system by connecting a sealed chamber, a gas supply and setting the state
to LEAKTEST by issuing a “K” command. The test takes about 1 minute and performs a leak test at
two pressures - close to the supply and close to atmospheric pressure. The system is deemed
leak tight if neither test shows a change in pressure of more than ±5mbar/bar/minute. The test
assumes a system volume of about 30mls (the standard P-Pump chamber
1
.
When your application sees the status change back to IDLE, it can read the leak test result using
the “k” command. See command list below for details.
5.2 Control strategy
The pump only sends data in direct response to a command. As communication is asynchronous,
it is safest to write commands to the pump immediately following a completed response from the
pump to avoid collisions on the bus.
You can use the API to completely control the pump by setting the pump in full remote control
mode or leave the pump in manual mode and simply read pressure and state information back
from it when required. Full remote control mode has a timeout limit - you must send a
command to the pump at least once every 30 seconds or the pump will revert to manual mode
and IDLE. This acts as a safety watchdog in the event of PC, application or communications
failure.
The schematics below show a simple way of handling the data flow to and from the pump. There
are other methods that will work equally well or may be better or easier to implement in your
system. The system outlined has four main elements.
1. An interrupt driven timer
1
An acceptable leak rate of <±5mbar/bar/minute maximum is specified. Typical values are <±3mbar/bar/minute. The
apparent leak rate reported is inversely related to system volume – the specification assumes a standard 30ml volume
sealed system.