1
FRC 2495 Hive Mind 2018 Robot Manual
Version 2.0 (07-MAR-2018)
Introduction
Scope
This manual explains how to control the FRC 2495 Hive Mind 2018 Robot.
Requirements
To control the robot, you need at the minimum a Windows PC running the latest FRC Driver Station
software, the Shuffleboard app, 2 joysticks and a gamepad.
To be able to use the camera for target tracking you also need GRIP (Graphically-Represented Image
Processing) running on the Windows PC.
If you want to be able to modify the code running on the robot, you must further install a Java SE
Development Kit 8.xxx, Eclipse, and the WPI plugins for Eclipse.
Finally you need to install the CTRE Phoenix framework.
Subsystems
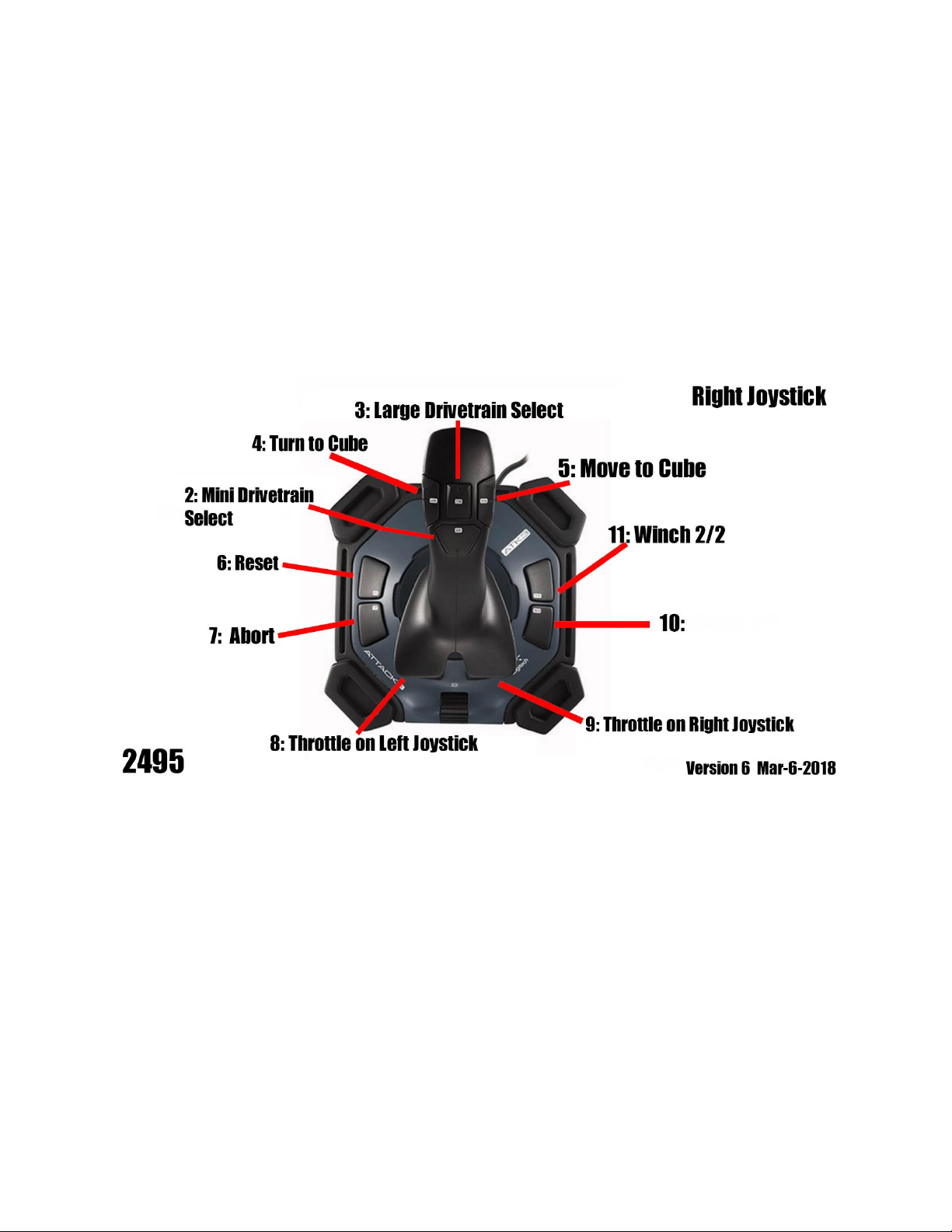
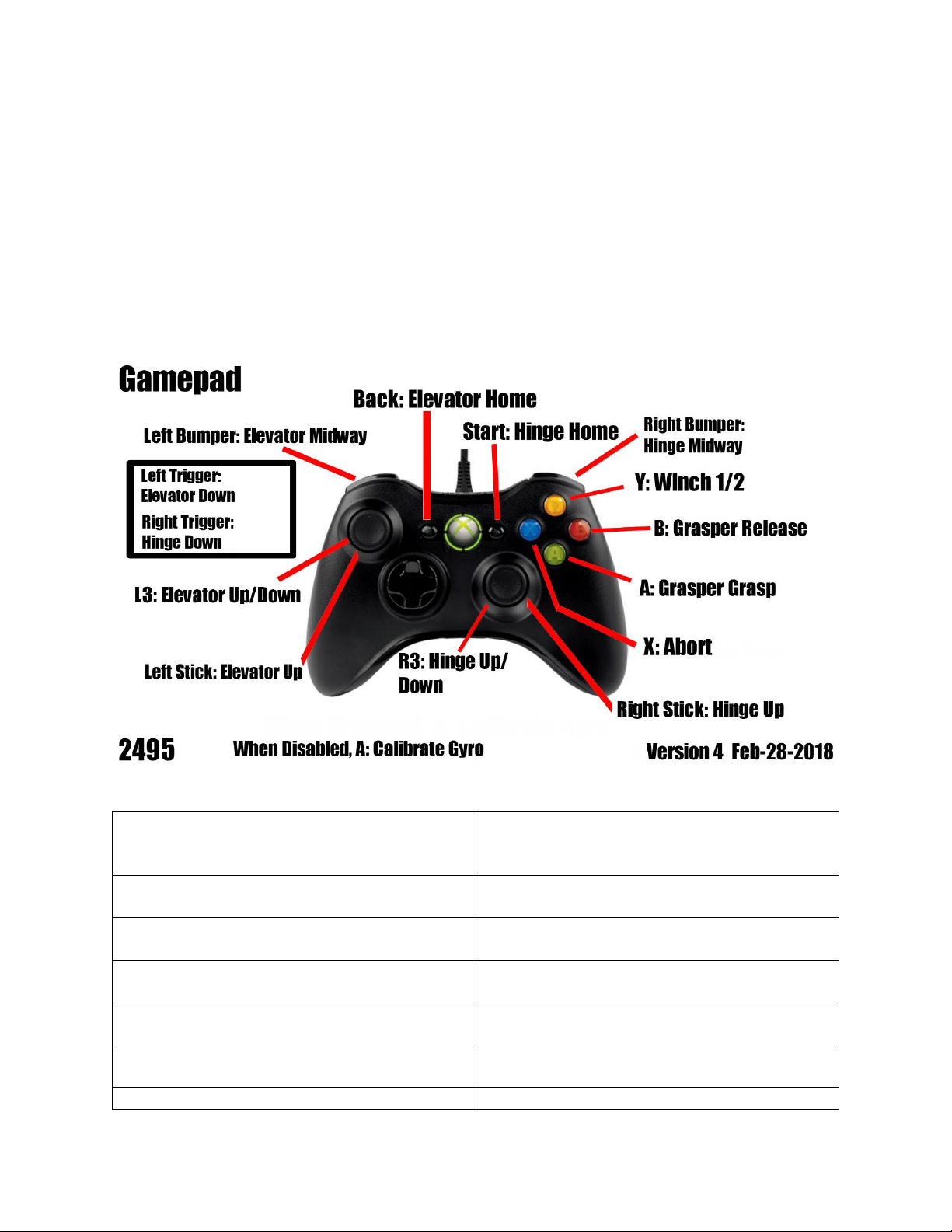
The robot is composed of multiple subsystems which may be controlled independently:
•Compressor to provide power to the Jack
•Drivetrain to drive
•Elevator to raise a cube to a given height
•Grasper to grasp or release a cube
•Hinge to link the grasper to the elevator
•Jack to switch between the large and mini drivetrains
•Mini Drivetrain to move athwart
•Winch to climb
The robot may use the following sensors:
•Accelerometer to measure tilt
•Camera to locate cubes
•Gyroscope to turn precisely
•Sonar to help grasping or releasing a cube