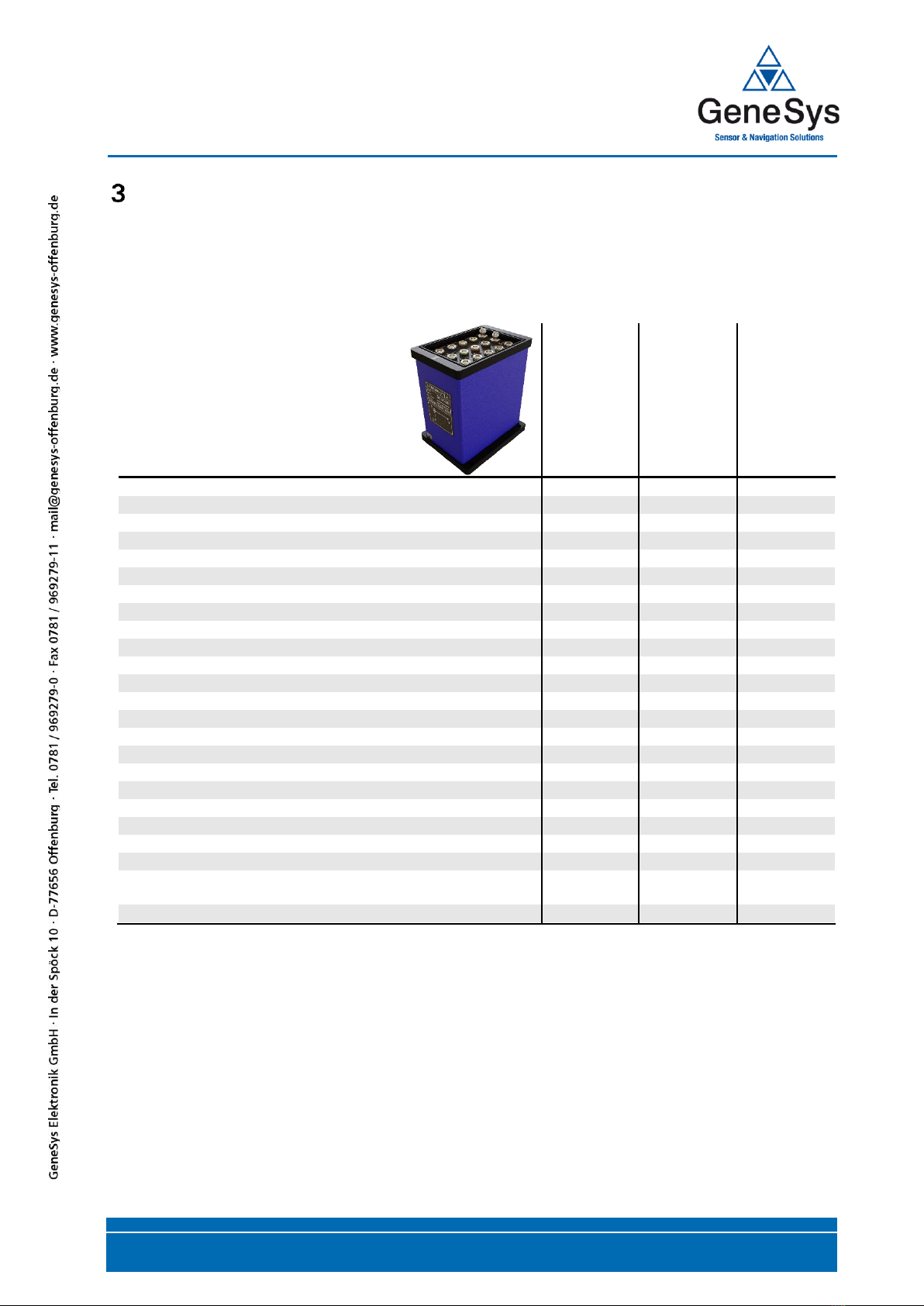
2.1 ADMA-G
The ADMA-G models differ in performance of the applied inertial sensors. Higher precision sensors
are less sensitive to GNSS interference or outages. Our gyro system does not require an export license.
All models are available with variable GNSS accuracy, ranging from simple L1 receivers with meter
accuracy to L1/L2 RTK receivers with centimeter accuracy. Likewise, all models are available as single
and dual antenna version with optional GNSS systems like GLONASS, Beidou, Galileo etc.
The configuration of all ADMA systems can be done quickly and easily via web browser.
2.2 ADMA-Speed
The ADMA-Speed is a GNSS speed sensor with integrated inertial sensors. It is optimized for brake
tests. For easy installation, the inertial sensors are integrated in the GNSS antenna. All motion data
of the vehicle is calculated by means of the tried and tested ADMA technology. In the BASIC version
acceleration, speed and braking distance is transmitted via the CAN and Ethernet interface. ADMA-
Speed eliminates the known disadvantages of GNSS speed sensors.
Optionally, ADMA-speed can be expanded to a full-fledged GNSS-aided inertial system with
centimeter position accuracy, eg. for vehicle dynamics testing or verification of driver assistance
systems.
2.3 ADMA-Slim
The ADMA-SIim is a full-fledged GNSS/InertiaI System based on MEMS gyroscopes and
accelerometers and a high performance geodetic GNSS receiver. Comparing the performance it is
similar to our ADMA-G-EntryLevel or ADMA-Speed models. The ADMA-SIim has been designed for
applications with space or weight restrictions, e.g. to be integrated in walk-on-able platforms for GSTs
(Guided Soft Targets) or VRU (Vulnerable Road User) dummies.
ADMA-Slim is available in three different versions:
•standard version whit Lemo connectors
•single connector version whit MIL connector
•unhoused OEM version
2.4 Ordering options
All models of the ADMA family can be ordered as single or dual GNSS antenna version.
2.4.1 Single GNSS antenna version
For the most vehicle testing applications, a single antenna version is sufficient.
The combination of INS and GNSS allows precise output of the yaw angle at low speed and stationery
maneuvers, thanks intelligent algorithmic and a standstill detection.
2.4.2 Dual GNSS antenna version
The dual GNSS antenna version allows the output of a precise yaw angle even without prior
initialization of the ADMA. This feature is important for very slow vehicles or at low friction tests,
such as on ice.