GS_VE-1x_2x_Operation_Manual_V09.docx/14.09.2020
VE-1x/2x Series Velocity Sensor Page 4 / 10
1. Introduction
The GeoSIG VE-1x/2x series velocity sensors consist of the following sensor types:
Frequency response 1 Hz to 315 Hz:
• VE-11 uniaxial
• VE-12 biaxial
• VE-13 triaxial
Frequency response 4.5 Hz to 315 Hz:
• VE-21 uniaxial
• VE-22 biaxial
• VE-23 triaxial
All sensor types are implemented in the same waterproof, 94 x 96 x 193 mm cast aluminium housing. The
modules inside the VE velocity sensors are 1 to 3 high quality geophones, geophone signal amplifier, gain
ranger, geophone integrator (VE-1x only) and current loop interface for 0 to 20 mA output. Since the modules
can easily be added regarding specific user requirements, the VE velocity sensors offer maximum versatility
in obtaining the desired performance.
Small size and single bolt fixation allows for both saving space and installation time. Levelling is accomplished
via three-point levelling screws. Alternatively, the flanges that support levelling can be used for mounting if
desired.
2. Installation
The VE velocity sensors are fairly simple devices to use, but some care must be taken in installation to be
assured of proper performance. Because there are many considerations, we recommend that before starting
installation, you review each section of this manual to ensure the best possible chance of a simple installation
that works right the first time. Prior to and after installation we recommend that you verify functionality of the
VE velocity sensor and the cable assembly with testing the output signal and test pulse response of the sensor.
This may save time and trouble as well as give confidence that connections are done correctly.
The location of the sensor, preferably as close as possible to the associated recorder, should be as level and
smooth as possible and the foundation should be of concrete, rock or similar material which is perfectly bonded
to the ground or structure to be measured or monitored. Special installations such as installing vertically on a
reinforced concrete wall (i.e. vertical foundation) are also possible, provided that the sensor is compatible with
the required orientation, the location is appropriately selected and the sensor is properly mounted.
2.1. Installing
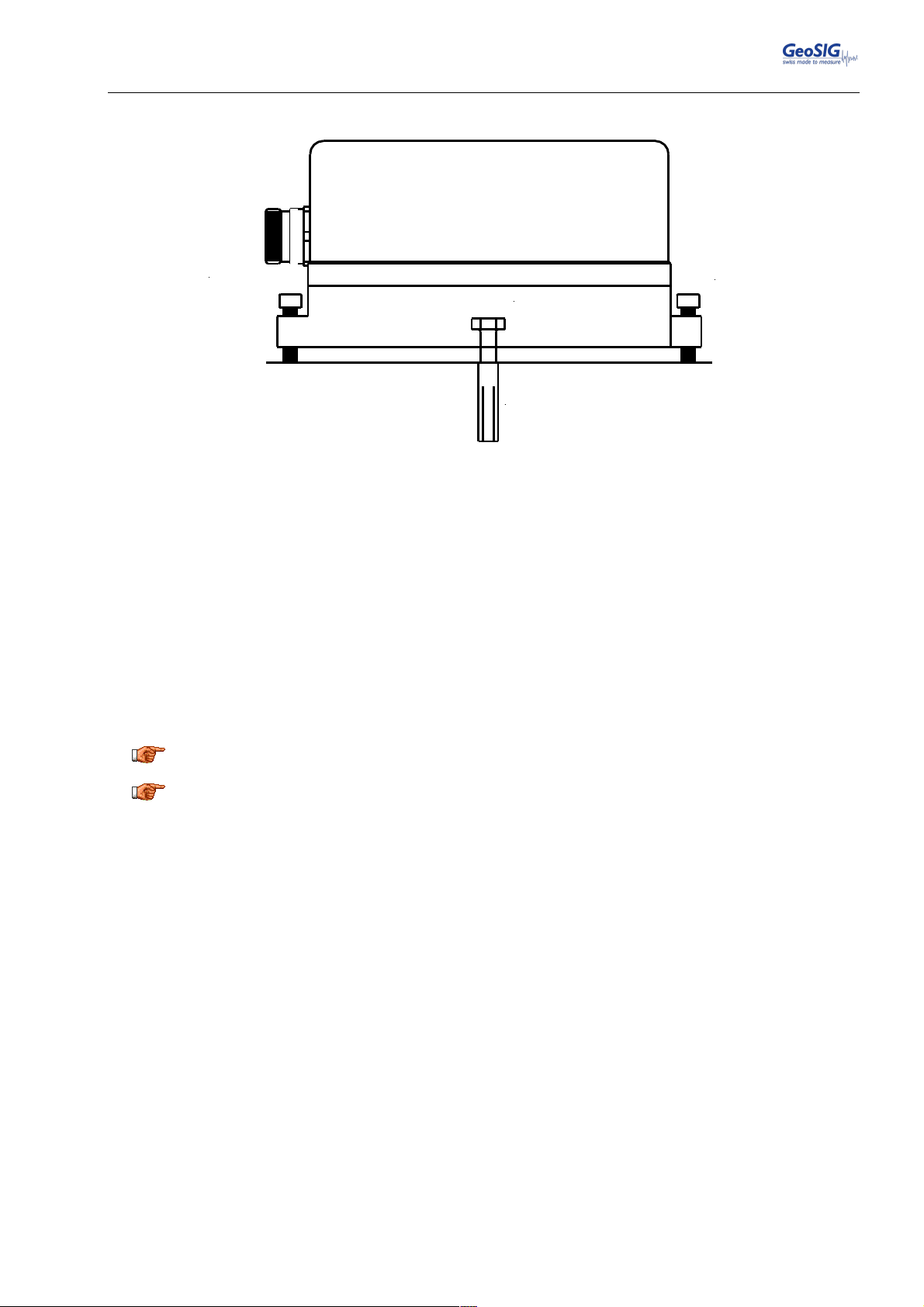
The VE velocity sensor must be firmly mounted to the foundation and levelled using the single centre pivot bolt
and the three-point levelling screws as shown in Figure 1. The "T" slot on the bottom of the sensor housing is
made to accept an M8 x 35 mm stainless steel bolt head. This centre pivot bolt is first fastened to the foundation
leaving approximately 18 – 20 mm of height above the installation surface. The sensor, at its “T” slot, is then
slipped onto the bolt head and oriented in the proper direction. The three-point levelling screws are then
adjusted and tightened to both level the sensor and securely fasten it to the surface.
In order to prevent any damage to the sensor housing or the fixation screw and/or anchor, do not
tighten the levelling screws using excessive force.
Use a bubble level and place it on the top of sensor surface, level first along one axis, then the other as final
levelling adjustments are made.