DA98A User Manual
V
Contents
Overview............................................................................................................................................1
1.1 Introduction................................................................................................................................1
1.2 Check after delivery.................................................................................................................2
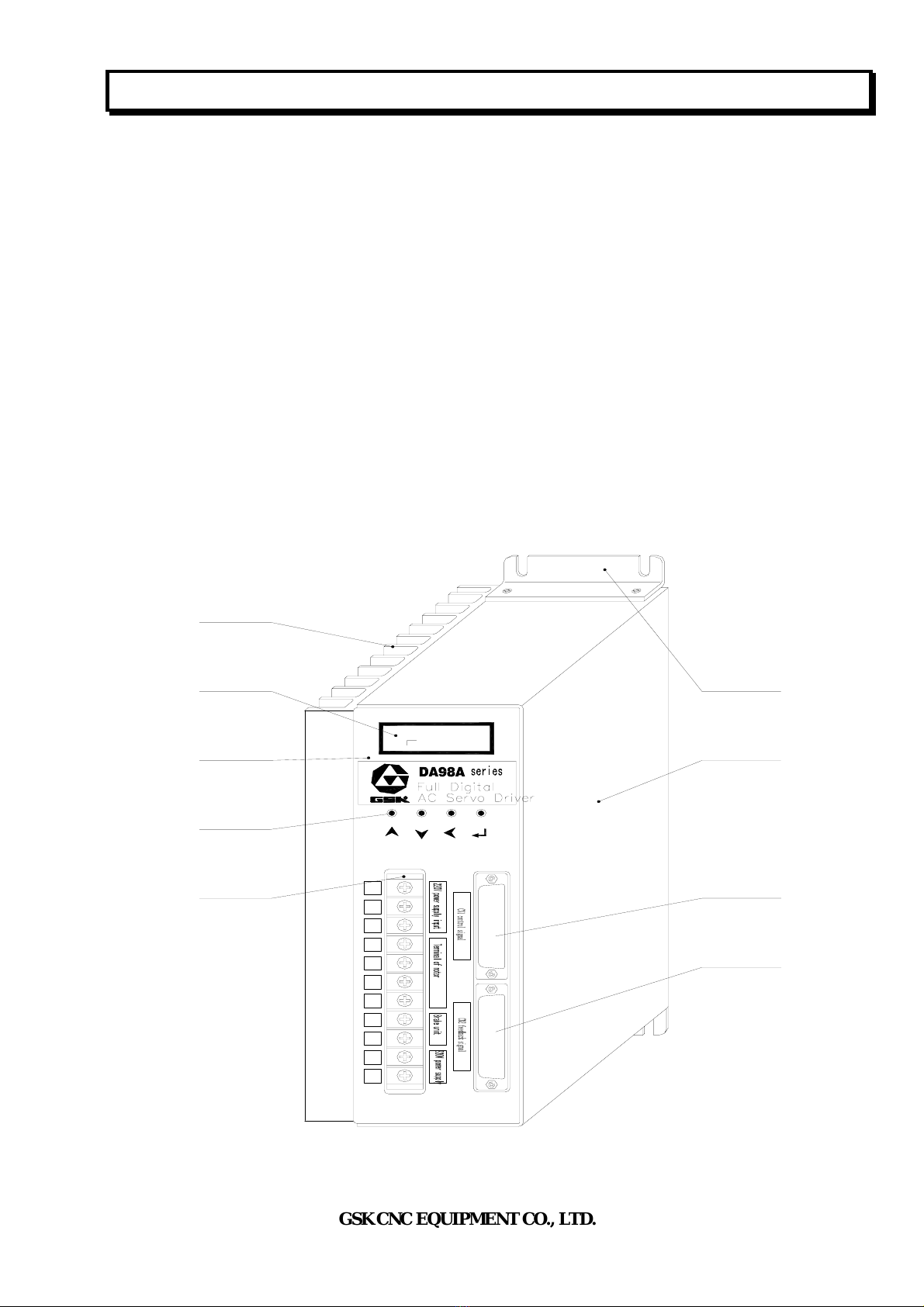
1.3 Outline..........................................................................................................................................3
Installation.......................................................................................................................................5
2.1 Environmental condition........................................................................................................5
2.2 Installation of servo driver.....................................................................................................5
2.3 Installing servomotor...............................................................................................................7
Wiring...................................................................................................................................................9
3.1 Standard wiring.........................................................................................................................9
3.2 Terminal function....................................................................................................................11
3.3 I/O Interface method.............................................................................................................14
Parameter.......................................................................................................................................17
4.1 Parameter list...........................................................................................................................17
4.2 Parameter function.................................................................................................................18
4.3 Type code parameter and motor........................................................................................22
Alarm and troubleshooting..............................................................................................24
5.1 Alarm list...................................................................................................................................24
5.2 Alarm troubleshootings.........................................................................................................25
Display and operation..........................................................................................................30
6.1 Keyboard operation...............................................................................................................30
6.2. Monitoring mode...................................................................................................................30
6.3 Parameter setting....................................................................................................................33
6.4 Parameter management........................................................................................................34
6.5 Speed trial run.........................................................................................................................36