- ii -
Tab e of Content
1. Introduction.............................................................................................1
1.1 Genera introductions .......................................................................1
1.2 Key Features......................................................................................1
1.3 App ications.......................................................................................1
2 Technica Description.............................................................................2
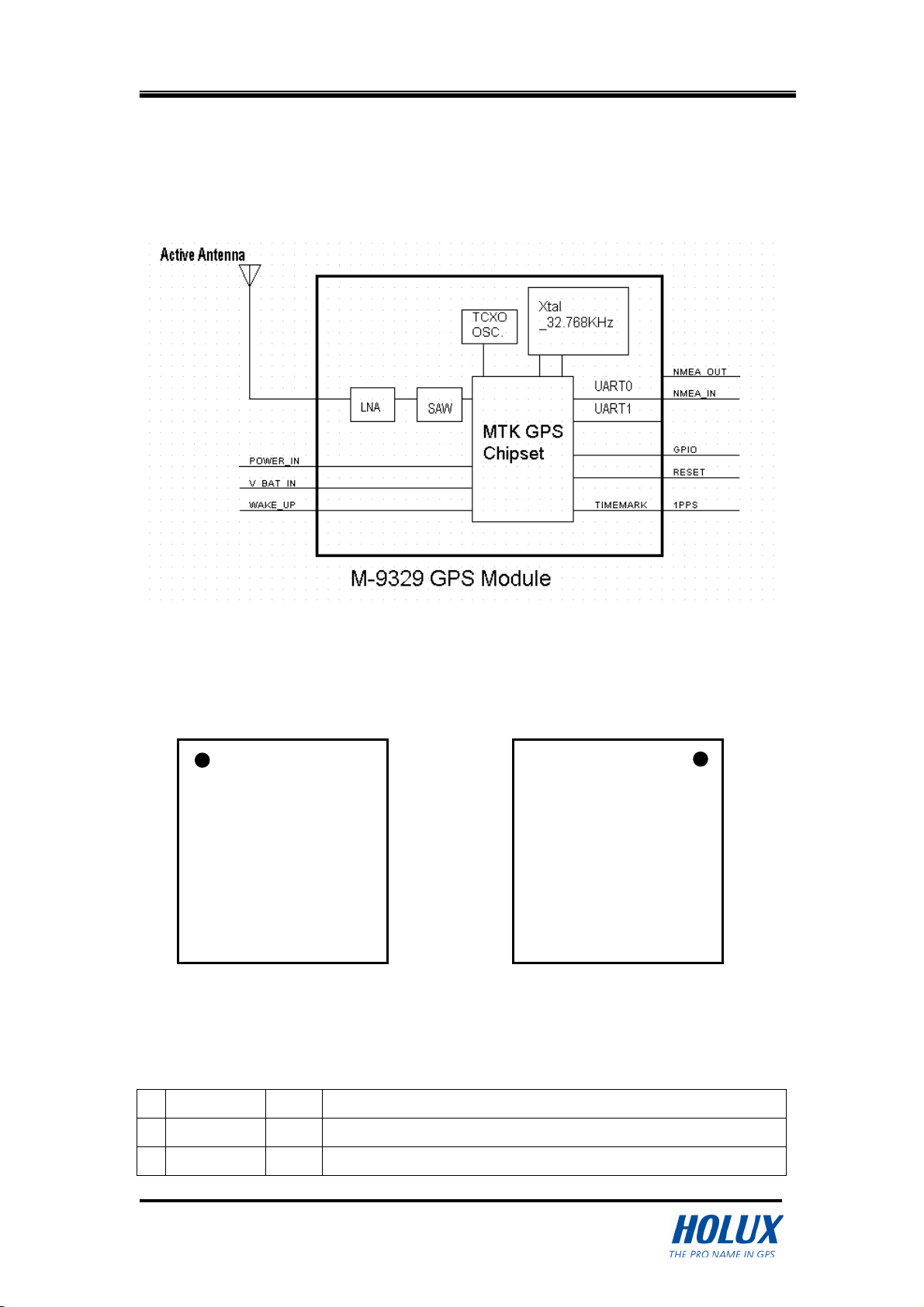
2.1 B ock Diagram ...................................................................................2
2.2 Pin Definition .....................................................................................2
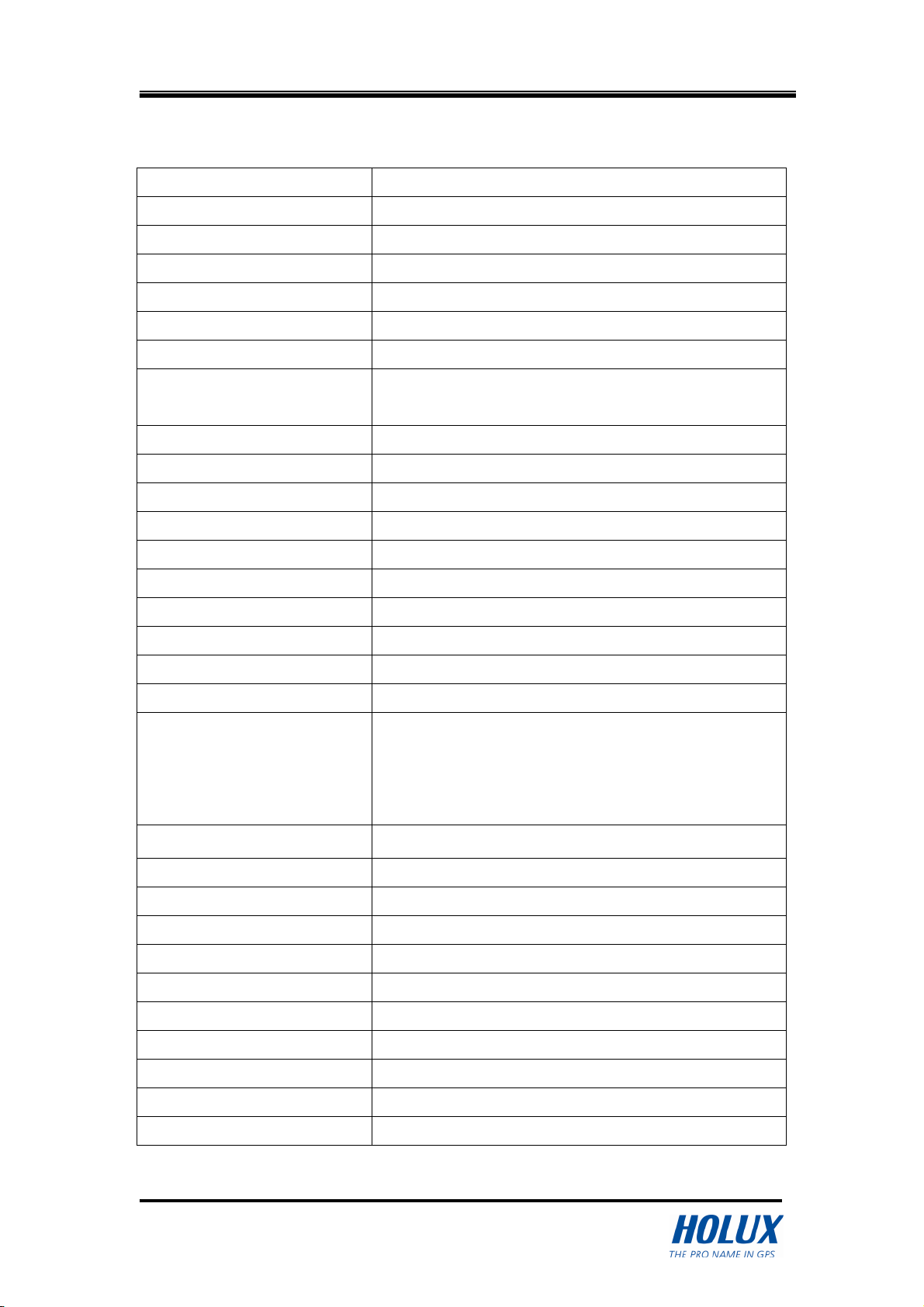
2.3 Specification ......................................................................................4
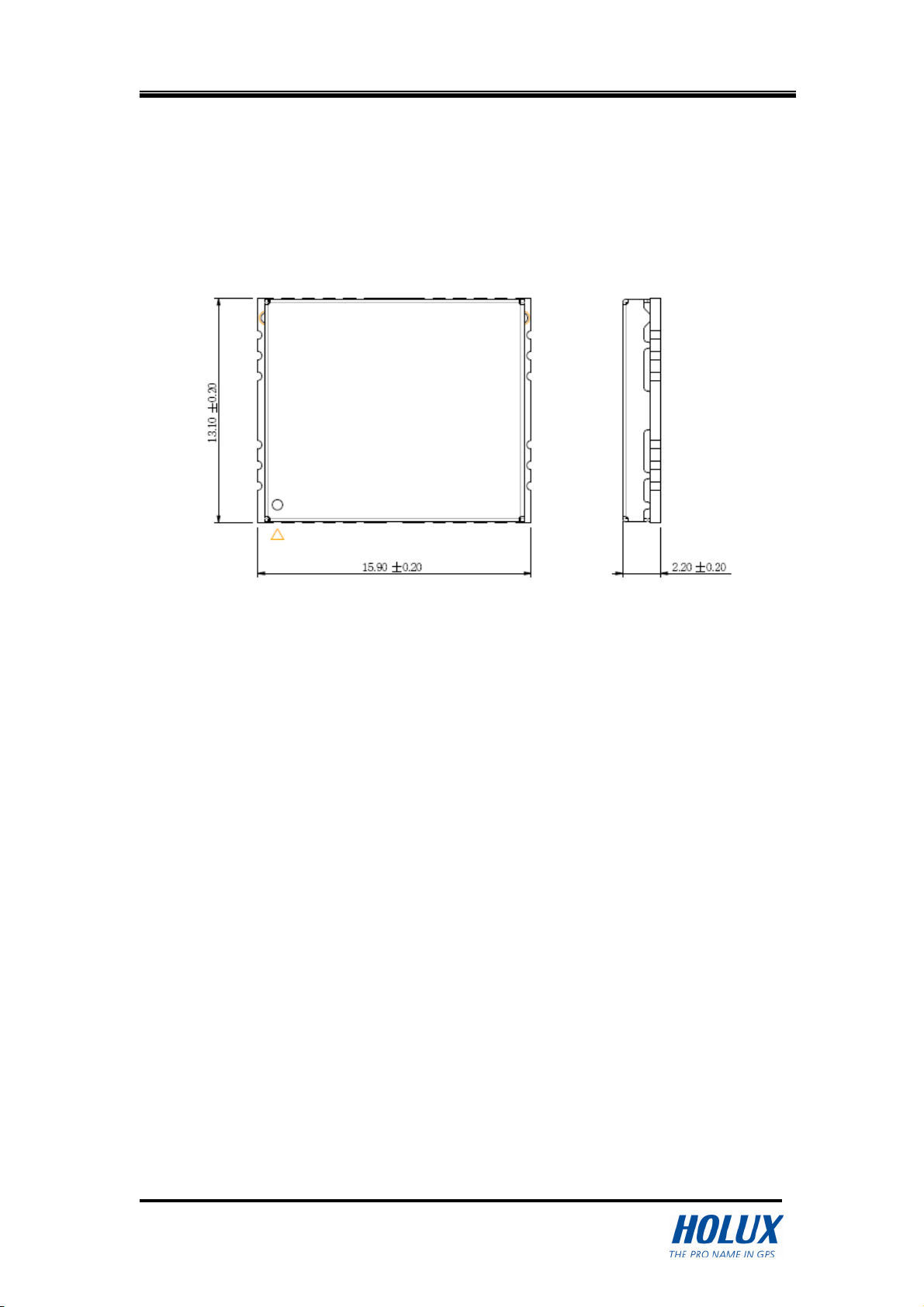
3 Mechanica Dimension ...........................................................................6
3.1 Mechanica Dimension......................................................................6
4 Package ...................................................................................................7
4.1 Packing ..............................................................................................7
4.2 Reference Product Photo.................................................................8
5. User Interface..........................................................................................9
5.1 NMEA Protoco ..................................................................................9
5.2 NMEA Protoco format......................................................................9
5.3 MTK NMEA Packet Format .............................................................10
6. Reference Design ................................................................................. 11
6.1 Reference circuit............................................................................. 11
6.2 Reference PCB pattern...................................................................12
6.3 Recommendation ref ow profi e.....................................................13