T8 Torque Sensor Operation Manual
Interface Inc. ● 7401 East Butherus Drive, Scottsdale, Arizona 85260 USA ● Phone 480.948.5555 ● Fax 480.948.1924
www.interfaceforce.com ● Email: contact@interfaceforce.com ● 800.947.5598
Page 3 of 11
Contents
Table of Contents
Imprint .............................................................................................................................................................................. 2
Contents............................................................................................................................................................................ 3
1
Read First........................................................................................................................................................... 4
Safety and Caution Symbols...................................................................................................................................... 4
Intended Use............................................................................................................................................................. 4
Dangers
Neglecting of Safety Notes........................................................................................................................................ 4
Remaining Dangers ................................................................................................................................................... 4
Reconstructions and Modifications .......................................................................................................................... 4
Personnel .................................................................................................................................................................. 4
Warning Notes .......................................................................................................................................................... 4
2
Term Definitions ................................................................................................................................................ 5
Terms
Definition of the Pictograms on the Torque Sensor.................................................................................................. 5
3
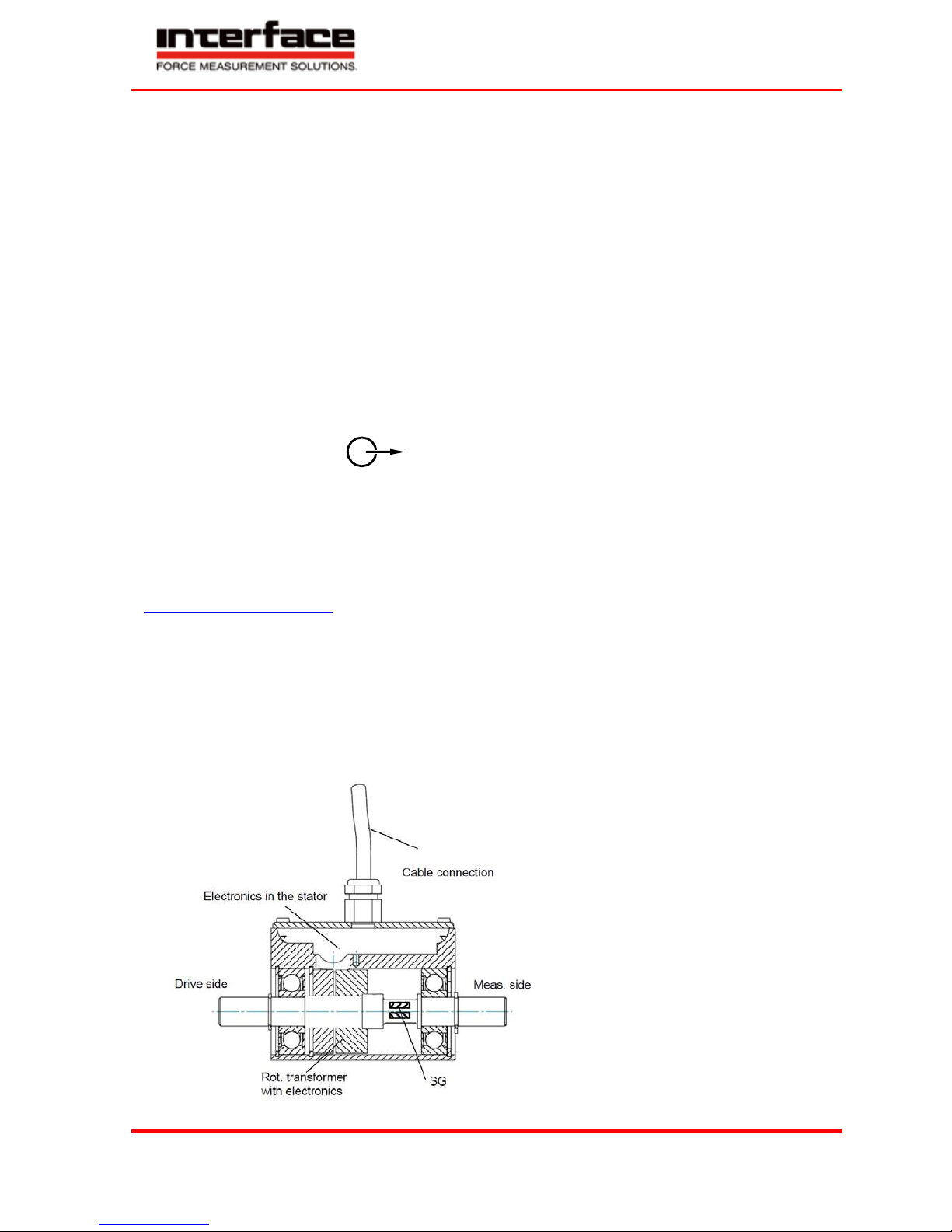
Product Description .......................................................................................................................................... 5
Mechanical Setup...................................................................................................................................................... 5
Electrical Setup.......................................................................................................................................................... 6
4
Mechanical Assembly ........................................................................................................................................ 6
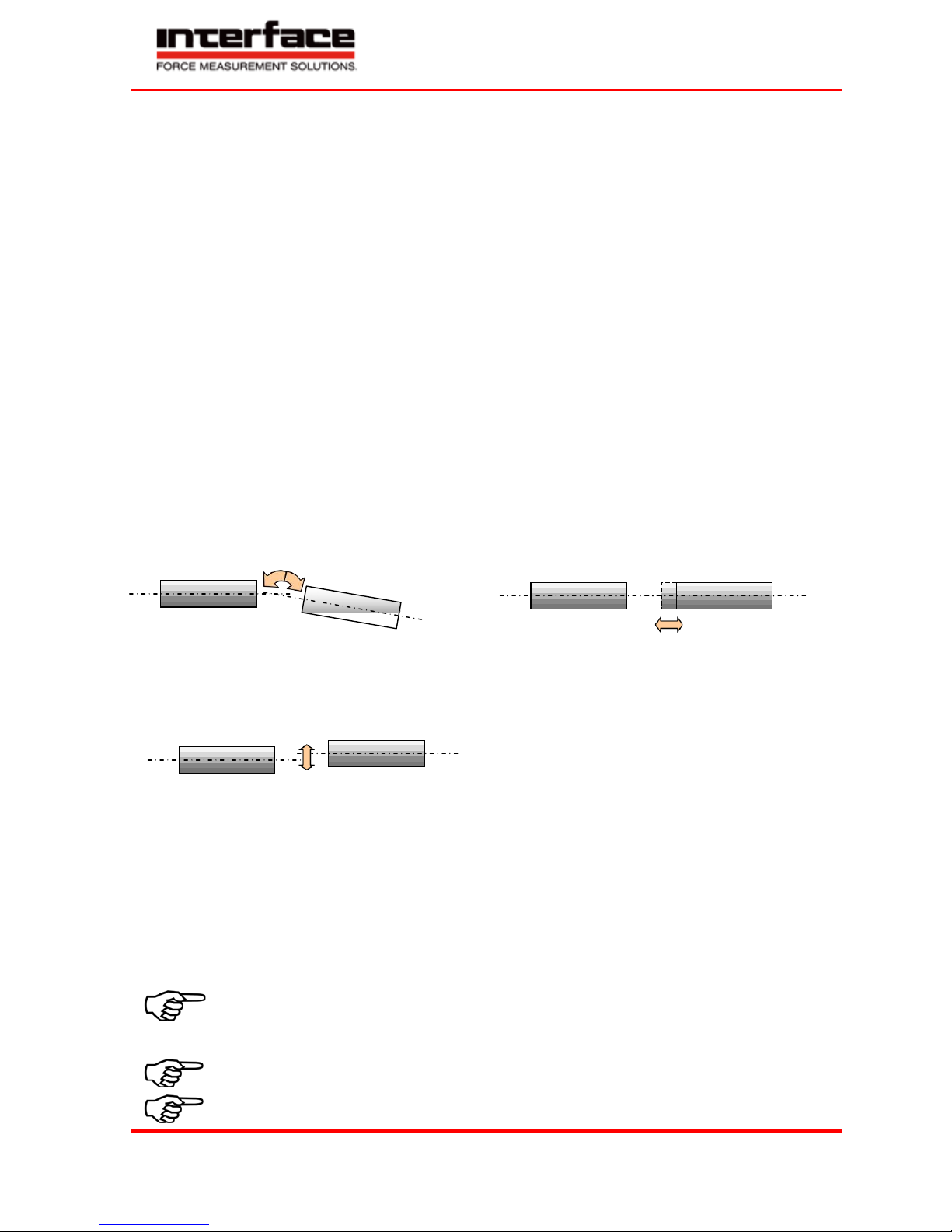
Couplings
Misalignment Possibilities of Single-Jointed Couplings............................................................................................. 6
Double-Jointed Couplings ......................................................................................................................................... 6
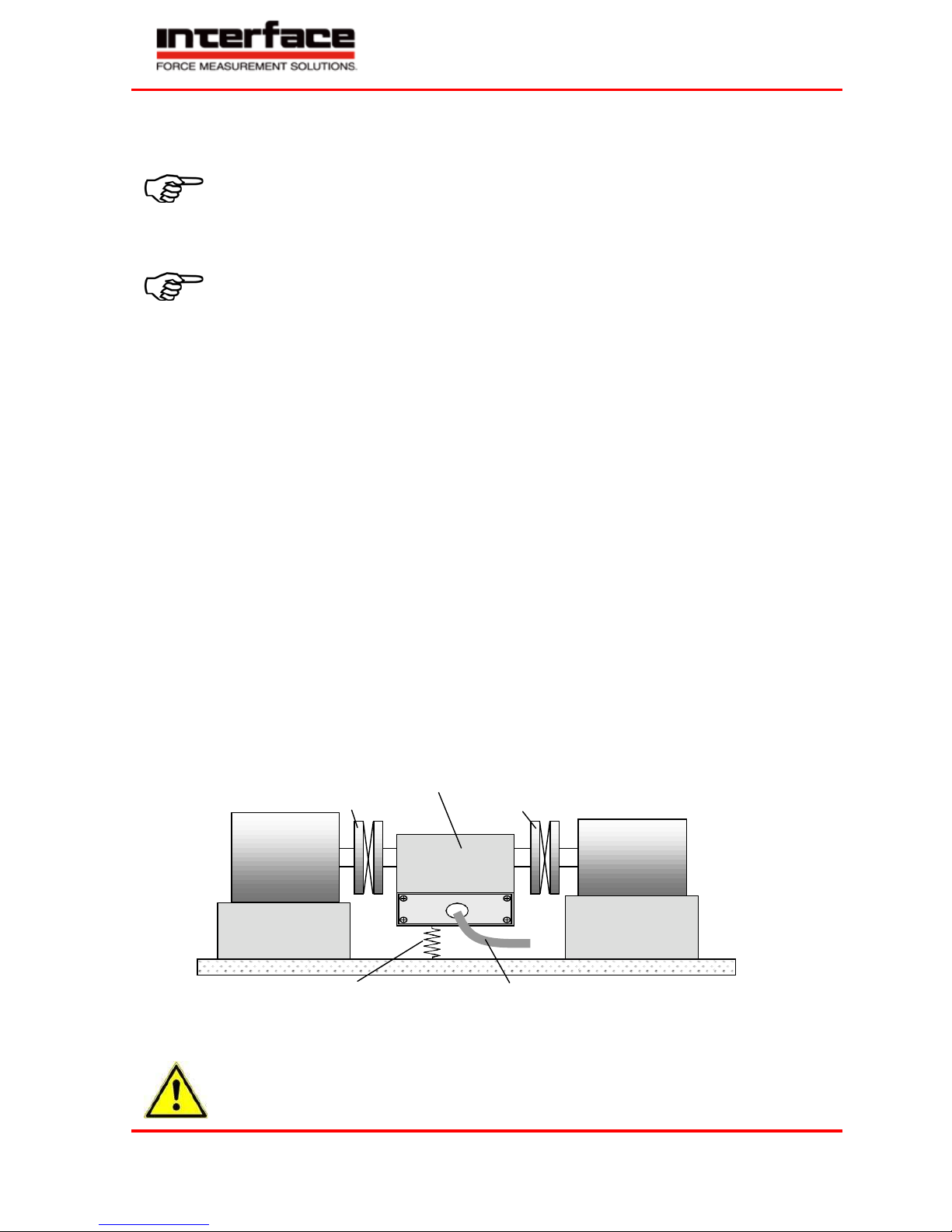
Alignment of the Measurement Arrangement ......................................................................................................... 6
General
Torque Sensors below 20 N·m.................................................................................................................................. 7
Torque Sensors from 20 N·m and above .................................................................................................................. 7
Free-floating Assembly.............................................................................................................................................. 7
Foot Version Assembly.............................................................................................................................................. 8
5
Electrical Connection......................................................................................................................................... 8
Pin Connection .......................................................................................................................................................... 8
Cable
Shielding Connection ................................................................................................................................................ 8
Running of Measuring Cables ................................................................................................................................... 8
6
Measuring ......................................................................................................................................................... 9
Engaging
Direction of Torque ................................................................................................................................................... 9
Static / Quasi-Static Torques..................................................................................................................................... 9
Dynamic Torques ...................................................................................................................................................... 9
General
Natural Resonances .................................................................................................................................................. 9
Speed Limits .............................................................................................................................................................. 9
Disturbance Variables ............................................................................................................................................... 9
7
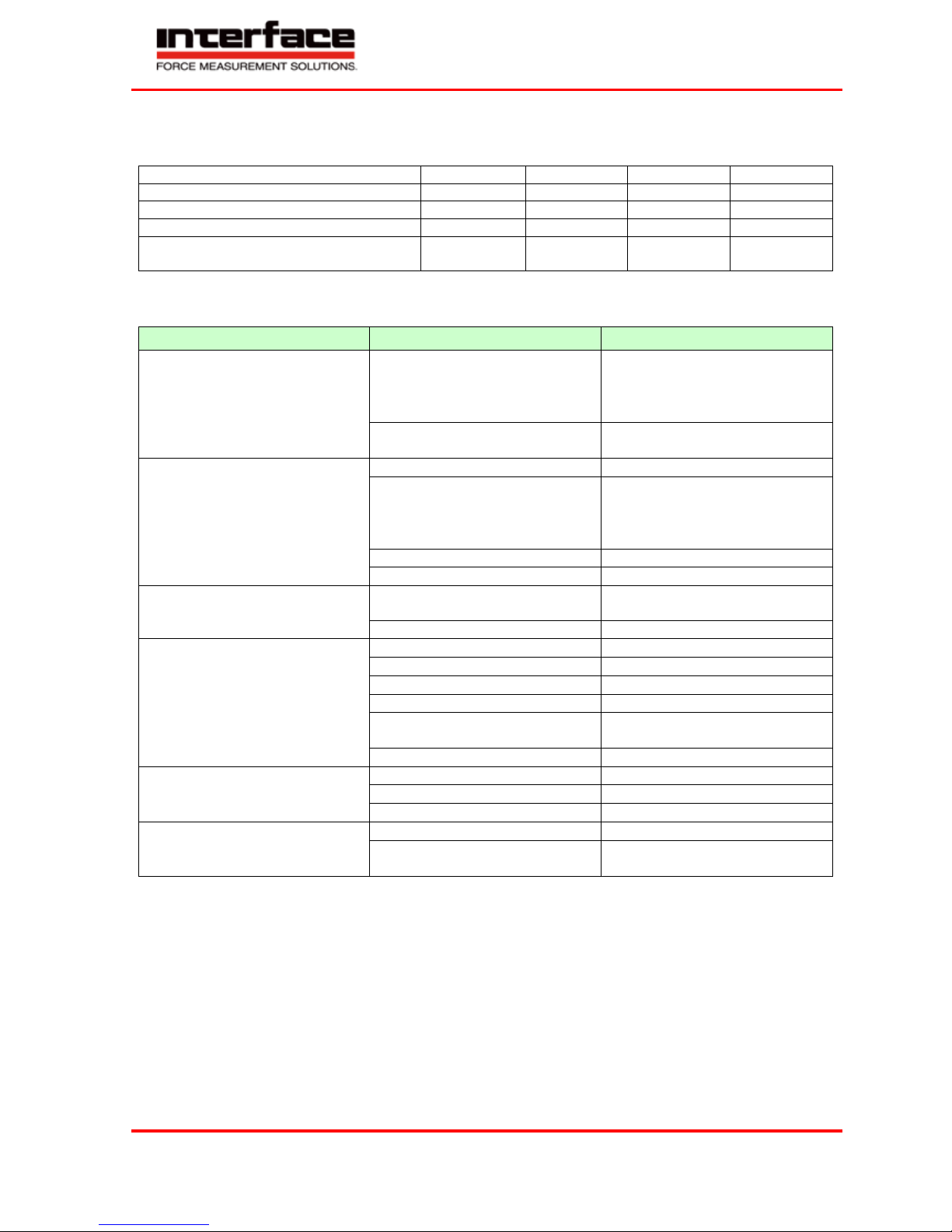
Maintenance ................................................................................................................................................... 10
Maintenance Schedule............................................................................................................................................ 10
Trouble Shooting..................................................................................................................................................... 10
8
Decommission................................................................................................................................................. 10
9
Transportation and Storage ............................................................................................................................ 10
Transportation ........................................................................................................................................................ 11
Storage
10
Disposal ........................................................................................................................................................... 11
11
Calibration ....................................................................................................................................................... 11
Proprietary Calibration............................................................................................................................................ 11
DKD-Calibration....................................................................................................................................................... 11
Re-Calibration ......................................................................................................................................................... 11
12
Data Sheet ....................................................................................................................................................... 11