4
1. Introduction
1.1. Important safety
This variable speed drive product (Optidrive) is intended for professional incorporation into complete equipment or systems.
it may present a safety hazard. The Optidrive uses hi h volta es and currents, carries a hi h
mechanical plant that may cause injury. Close attention is required to system desi n and electrical installation to avoid haz
operation or in the event of equipment malfunction
System desi n, installation, commissionin and maintenance must be carried out only by personnel who have the necessary train
experience. They must carefully read this safety information and the instructions in this Guide and follow all informatio
stora e, installation and use of the Optidrive, includin the specified environmental limitations.
Please read the IMPORTANT SAFETY INFORMATION below, and all Warnin and Caution information elsewhere.
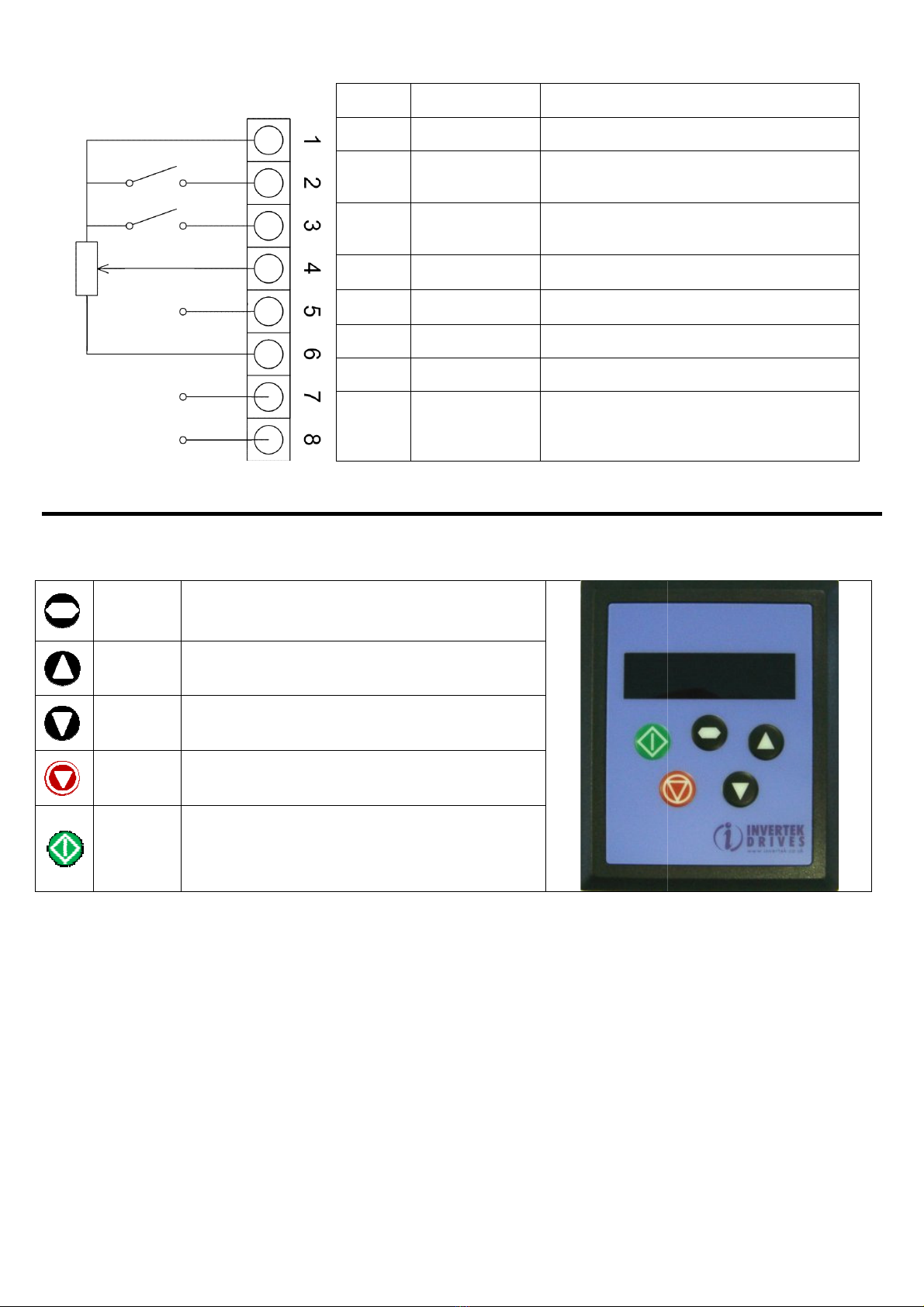
Indicates a potentially
hazardous situation which, if not
avoided, could result in injury or death.
Safety of machinery, and safety-
The level of
inte rity offered by the Optidrive control functions
use in safety-
critical applications without independent channels of protection. All applications where malfunction could
must be subject to a risk assessment and further protection provided where needed. Within the European Union, all machinery i
product is used must comply with Directive 89/392/EEC, Safety of Machinery. In particula
1.
Optidrives should be installed only by qualified electrical persons and in accordance with local and national re ulations and
practice. The Optidrive has an In ress Protection ratin of
Electric shock hazard! Disconnect and ISOLATE the Optidrive before attemptin any work on it. Hi h volta es are present at th
terminals and within the drive for up to 10 minutes after disconnection of
Where supply to the drive is throu h a plu and socket connector, do not disconnect until 10 minutes have elapsed after turni
the supply
Ensure correct earthin connections. The earth cable must be sufficient to carry the max
be limited by the fuses or MCB
The STOP function does not remove potentially lethal hi h volta es. ISOLATE the drive and wait 10 minutes before startin any
on it
Parameter P1-
01 can be set to operate the
If it is desired to operate the drive at any frequency/speed above the rated speed (P1
manufacturers of the motor and the driven machine about suitability
Carefully inspect the Optidrive before installation to ensure it is undama ed
Indoor Use Only.
Flammable material should not be placed close to the drive
The entry of conductive or flammable forei n bodies should be prevented
Relative humidity must be less than 95% (non
Ensure that the supply volta e, frequency and no. of phases (1 or 3 phase) correspond to the ratin of the Optidrive as deliv
An isolator should be installed between the power supply and the dr
Never connect the mains power supply to the Output terminals U, V, W.
Suitably rated fuses or MCB should be fitted in the mains supply to the drive.
Do not install any type of automatic switch ear between the drive and the motor
Wherever control cabli
n is close to power cablin , maintain a minimum separation of 100 mm and arran e crossin s at 90 de rees
Ensure that all terminals are ti htened to the appropriate torque settin
1.2.
Electromagnetic Compatibility (EMC)
The Optidrive
Plus 3GV Compact is desi ned to be mounted in close proximity to the driven motor. Within the European Union, equipment into
which this product is incorporated must comply with 89/336/EEC, EMC. It is the responsibility of the installer to ensure that
system into which the product is incorporated complies with the EMC le islation of the country of use. Drive versions
internal EMC filter,
desi ned to reduce the conducted emissions back into the supply via the powe
European standards.
Installation must always be carried out by qualified installation en ineers, observin ood wirin practice such as power and
se re ation and correct screenin techniques to minim
must be used with the screen bonded to earth throu h the lar est possible surface area at both ends.
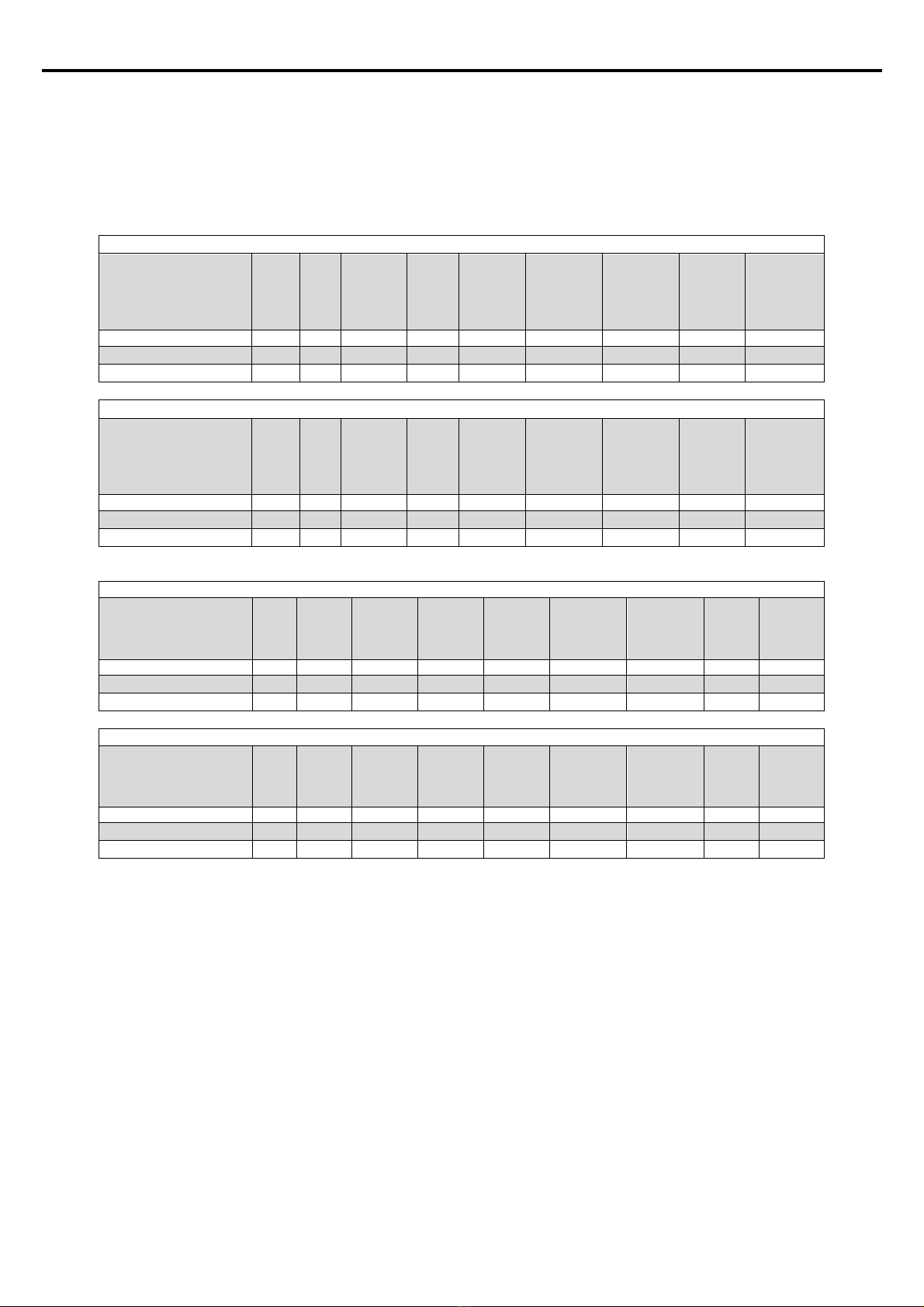
The followin table ives the maxi
mum motor cable len ths allowed f
Filter :-
Drive Type
Maximum Motor Cable Len th for Emission Classification as defined by EN61800
kW Volts C2
0.75 230 Filtered, 1m
1.5 230 Filtered, 1m
0.75 400 Filtered, 1m
1.5 400 Filtered, 1m
Optidrive Plus 3
GV
Compact - User Guide
www.invertek.co.uk
This variable speed drive product (Optidrive) is intended for professional incorporation into complete equipment or systems.
it may present a safety hazard. The Optidrive uses hi h volta es and currents, carries a hi h
level of stored electrical ener y, and is used to control
mechanical plant that may cause injury. Close attention is required to system desi n and electrical installation to avoid haz
operation or in the event of equipment malfunction
.
System desi n, installation, commissionin and maintenance must be carried out only by personnel who have the necessary train
experience. They must carefully read this safety information and the instructions in this Guide and follow all informatio
stora e, installation and use of the Optidrive, includin the specified environmental limitations.
Please read the IMPORTANT SAFETY INFORMATION below, and all Warnin and Caution information elsewhere.
hazardous situation which, if not
avoided, could result in injury or death.
Indicates a potentially hazardous situation which, if not
avoided, could result in damage to property.
inte rity offered by the Optidrive control functions
–
for example stop/start, forward/reverse and maximum speed, is not sufficient for
critical applications without independent channels of protection. All applications where malfunction could
must be subject to a risk assessment and further protection provided where needed. Within the European Union, all machinery i
product is used must comply with Directive 89/392/EEC, Safety of Machinery. In particula
r, the electrical equipment should comply with EN60204
Optidrives should be installed only by qualified electrical persons and in accordance with local and national re ulations and
practice. The Optidrive has an In ress Protection ratin of
IP20. For hi her IP ratin s, use a suitable enclosure.
Electric shock hazard! Disconnect and ISOLATE the Optidrive before attemptin any work on it. Hi h volta es are present at th
terminals and within the drive for up to 10 minutes after disconnection of
the electrical supply.
Where supply to the drive is throu h a plu and socket connector, do not disconnect until 10 minutes have elapsed after turni
Ensure correct earthin connections. The earth cable must be sufficient to carry the max
imum supply fault current which normally will
The STOP function does not remove potentially lethal hi h volta es. ISOLATE the drive and wait 10 minutes before startin any
01 can be set to operate the
motor at up to 120,000 rpm, hence use this parameter with care.
If it is desired to operate the drive at any frequency/speed above the rated speed (P1
-09/ P1-
10) of the motor, consult the
manufacturers of the motor and the driven machine about suitability
for over-speed operation.
Carefully inspect the Optidrive before installation to ensure it is undama ed
Flammable material should not be placed close to the drive
The entry of conductive or flammable forei n bodies should be prevented
Relative humidity must be less than 95% (non
-condensin ).
Ensure that the supply volta e, frequency and no. of phases (1 or 3 phase) correspond to the ratin of the Optidrive as deliv
An isolator should be installed between the power supply and the dr
ive.
Never connect the mains power supply to the Output terminals U, V, W.
Suitably rated fuses or MCB should be fitted in the mains supply to the drive.
Do not install any type of automatic switch ear between the drive and the motor
n is close to power cablin , maintain a minimum separation of 100 mm and arran e crossin s at 90 de rees
Ensure that all terminals are ti htened to the appropriate torque settin
Electromagnetic Compatibility (EMC)
Plus 3GV Compact is desi ned to be mounted in close proximity to the driven motor. Within the European Union, equipment into
which this product is incorporated must comply with 89/336/EEC, EMC. It is the responsibility of the installer to ensure that
system into which the product is incorporated complies with the EMC le islation of the country of use. Drive versions
desi ned to reduce the conducted emissions back into the supply via the powe
r cables for compliance with
Installation must always be carried out by qualified installation en ineers, observin ood wirin practice such as power and
se re ation and correct screenin techniques to minim
ise emissions. Where the unit is remotely mounted from the motor, screened motor cables
must be used with the screen bonded to earth throu h the lar est possible surface area at both ends.
mum motor cable len ths allowed f
or compliance with the EMC standard for drives fitted with an internal RFI
Maximum Motor Cable Len th for Emission Classification as defined by EN61800
C3
Filtered, 1m
Filtered, 1m
Filtered, 1m
Filtered, 1m
This variable speed drive product (Optidrive) is intended for professional incorporation into complete equipment or systems.
If installed incorrectly
level of stored electrical ener y, and is used to control
mechanical plant that may cause injury. Close attention is required to system desi n and electrical installation to avoid haz
ards in either normal
System desi n, installation, commissionin and maintenance must be carried out only by personnel who have the necessary train
in and
experience. They must carefully read this safety information and the instructions in this Guide and follow all informatio
n re ardin transport,
Please read the IMPORTANT SAFETY INFORMATION below, and all Warnin and Caution information elsewhere.
Indicates a potentially hazardous situation which, if not
avoided, could result in damage to property.
for example stop/start, forward/reverse and maximum speed, is not sufficient for
critical applications without independent channels of protection. All applications where malfunction could
cause injury or loss of life
must be subject to a risk assessment and further protection provided where needed. Within the European Union, all machinery i
n which this
r, the electrical equipment should comply with EN60204
-
Optidrives should be installed only by qualified electrical persons and in accordance with local and national re ulations and
codes of
IP20. For hi her IP ratin s, use a suitable enclosure.
Electric shock hazard! Disconnect and ISOLATE the Optidrive before attemptin any work on it. Hi h volta es are present at th
e
Where supply to the drive is throu h a plu and socket connector, do not disconnect until 10 minutes have elapsed after turni
n off
imum supply fault current which normally will
The STOP function does not remove potentially lethal hi h volta es. ISOLATE the drive and wait 10 minutes before startin any
work
motor at up to 120,000 rpm, hence use this parameter with care.
10) of the motor, consult the
Ensure that the supply volta e, frequency and no. of phases (1 or 3 phase) correspond to the ratin of the Optidrive as deliv
ered.
n is close to power cablin , maintain a minimum separation of 100 mm and arran e crossin s at 90 de rees
Plus 3GV Compact is desi ned to be mounted in close proximity to the driven motor. Within the European Union, equipment into
which this product is incorporated must comply with 89/336/EEC, EMC. It is the responsibility of the installer to ensure that
the equipment or
system into which the product is incorporated complies with the EMC le islation of the country of use. Drive versions
are available fitted with an
r cables for compliance with
the harmonised
Installation must always be carried out by qualified installation en ineers, observin ood wirin practice such as power and
si nal cable
ise emissions. Where the unit is remotely mounted from the motor, screened motor cables
or compliance with the EMC standard for drives fitted with an internal RFI
Maximum Motor Cable Len th for Emission Classification as defined by EN61800
-3:2004
C4
10m
10m
10m
10m