EN
400400400
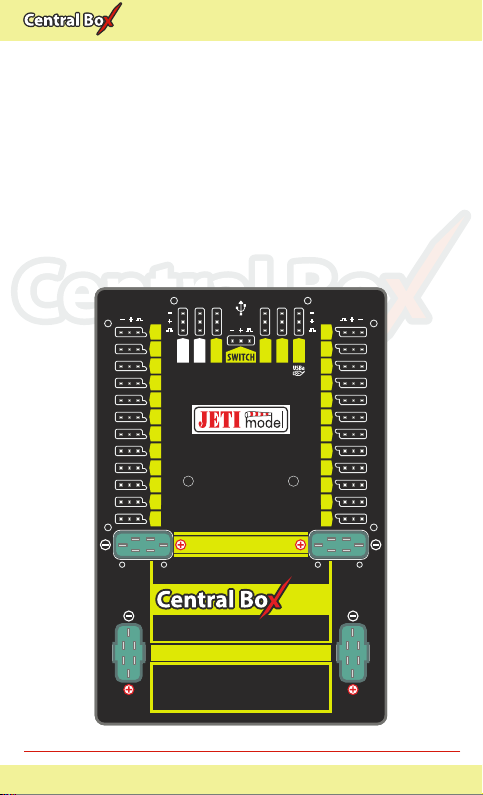
2 Description
Central Box 400 has 24 outputs for servos with individual
overload protection. More over, outputs Y17-Y24 can be
configured as:
servo output
logical input
logical output
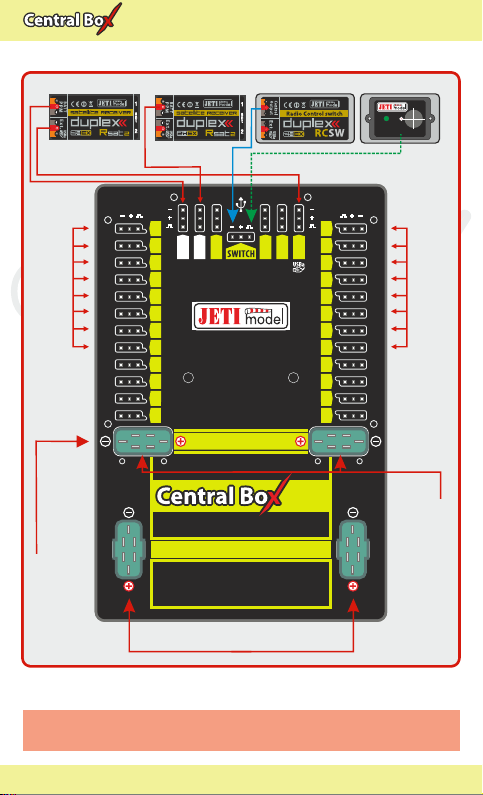
Control signals generated by the Central Box to servos are 5V. This
solution ensures reliable servo signal transfer for longer distances.
Ext1 - Ext4 ports can be configured for use as:
inputs for telemetry sensors
EX Bus expanders - used for connecting devices which support the
EX Bus protocol (the Central Box, a sensor,...)
Ext4 - slot is also used as an output to connect a JETIBOX to
configure the Central Box and for the firmware update connection
Rx1 - primary input for connecting receivers with serial output (EX,
PPM, UDI)
Rx2 - secondary (backup) input for connecting receivers with serial
output (EX bus, PPM, UDI)
Switch slot is reserved for connecting magnetic switch or RC Switch
BEC output serves as the output for stabilized voltage to power
supply other Central Boxes that can be power supplied from the
Central Box 400. The voltage at the output has the same level as the
voltage for supplying the servos. Voltage for the servo outputs is
adjustable from 5-8V with 0.1V steps.
For more safety, the Central Box 400 contains two BEC regulators
connected in parallel. Information about the correct power supply
and a faultless condition of the individual branches is indicated by
green LED and also by telemetry. It is not recommended to use the
BEC outputs for direct power supply of servos or receivers with
servos. These devices are not individually protected. If one element
of the branch supplied from the BEC output is overloaded, the
5 EN