Contents
Tel: (86)755-26434369IWebsite: www.leadshine.com
TableofContents
1. Introduction, FeaturesandApplications..................................................................1
Introduction..........................................................................................................1
Features................................................................................................................1
Applications.........................................................................................................2
2. SpecificationsandOperating Environment.............................................................2
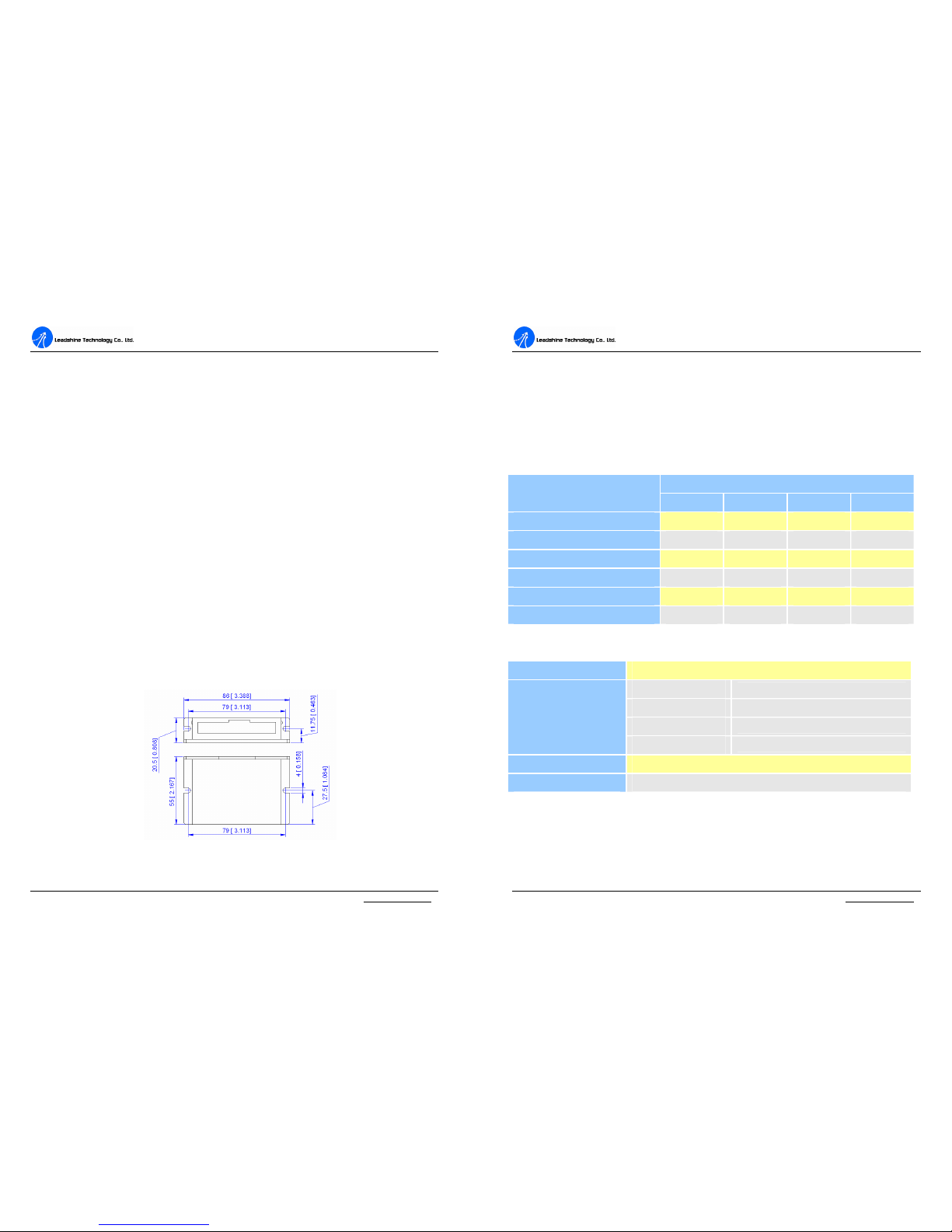
MechanicalSpecifications....................................................................................2
EliminationofHeat..............................................................................................3
ElectricalSpecifications.......................................................................................3
OperatingEnvironmentandParameters...............................................................3
3. Connections.............................................................................................................4
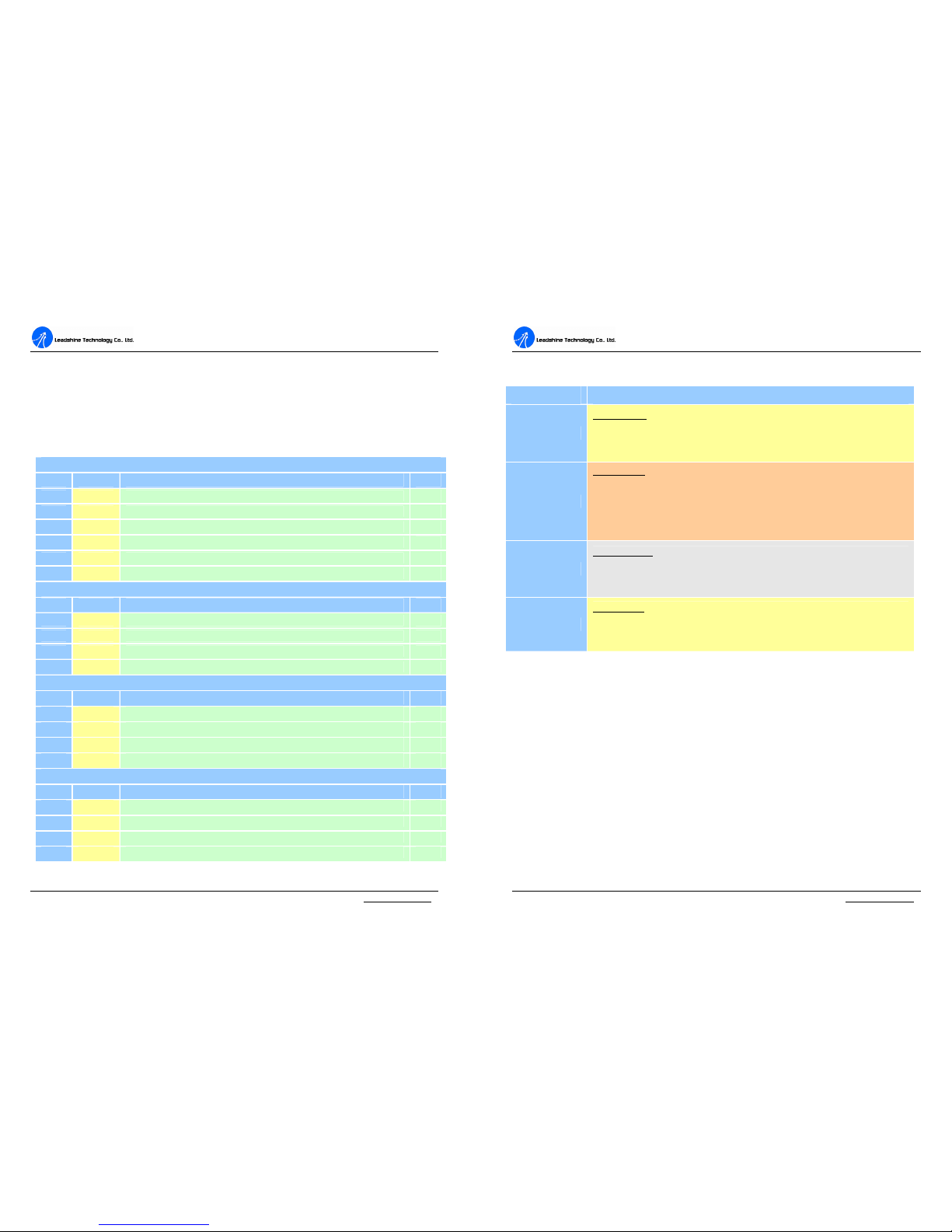
ConnectorConfiguration......................................................................................4
Generalinformation....................................................................................4
MoreaboutPUL/DIR/ENASignals............................................................5
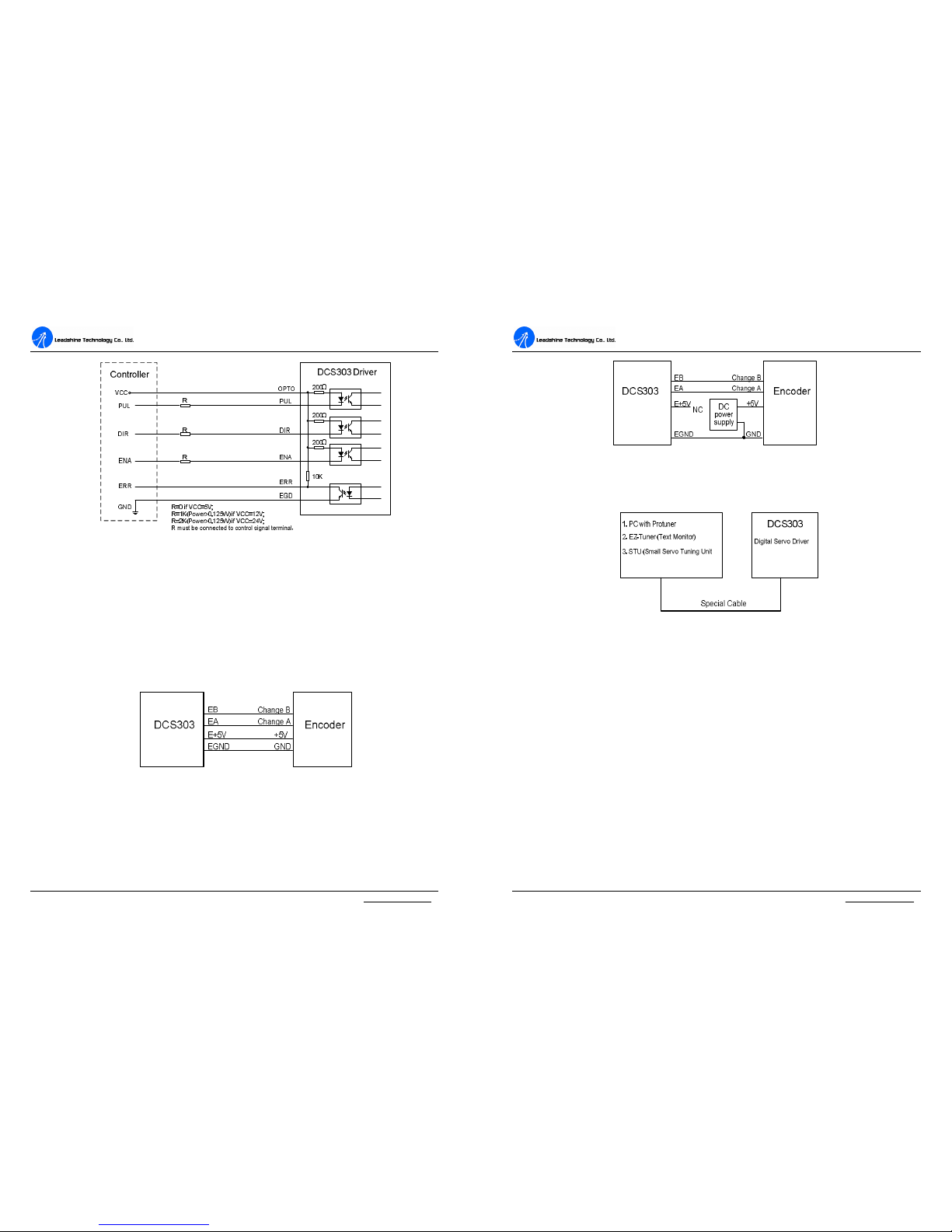
ControlSignalConnections..................................................................................5
EncoderConnections............................................................................................6
RS232 Interface Connection.................................................................................7
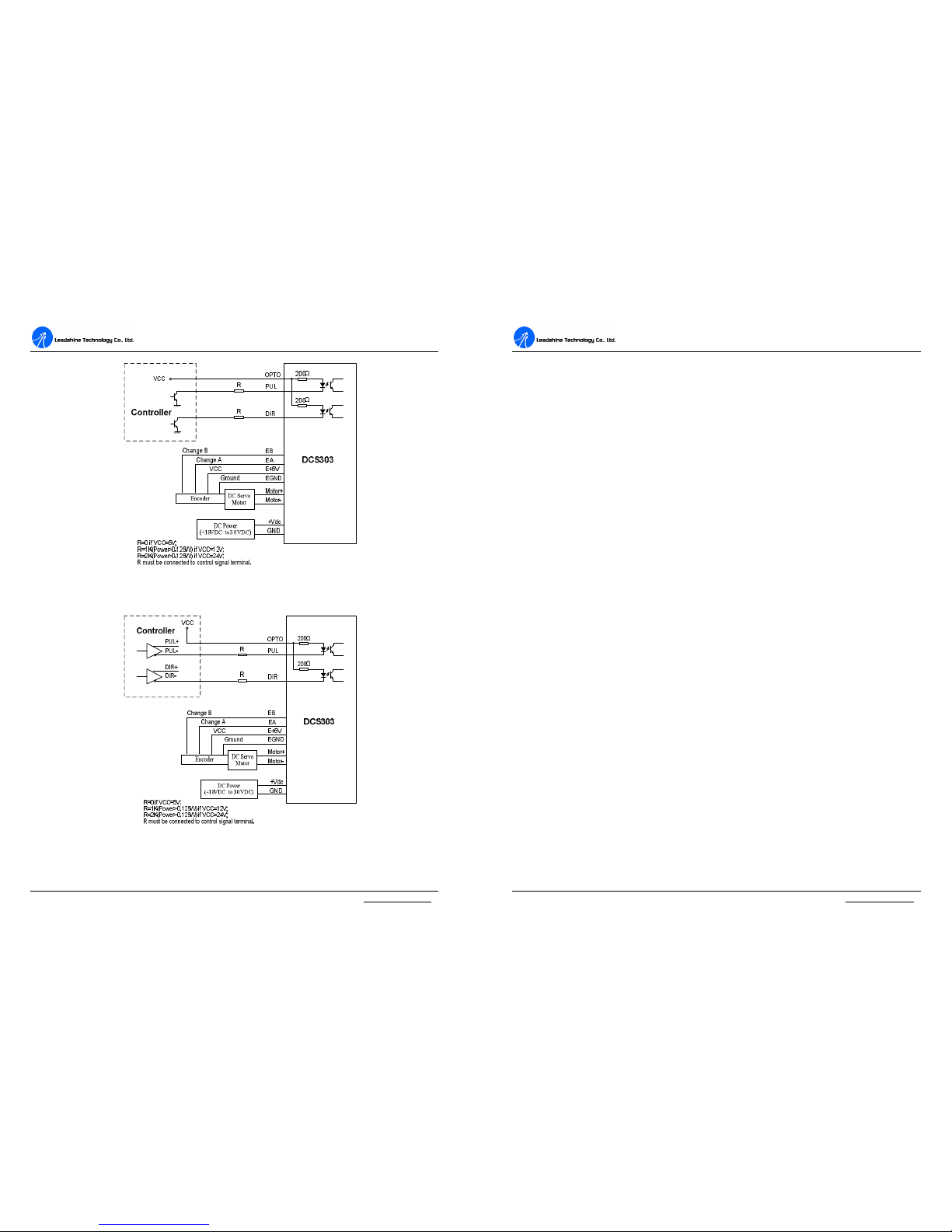
TypicalConnections.............................................................................................7
4. ServoSetup.............................................................................................................9
Install Encoder......................................................................................................9
PreparePowerSupply..........................................................................................9
RegulatedorUnregulatedPowerSupply....................................................9
SelectingSupplyVoltage.............................................................................9
PrepareController..............................................................................................10
SystemConnectionsandNoisePrevention........................................................10
WireGauge................................................................................................10
CableRouting............................................................................................11
Contents
Tel: (86)755-26434369II Website: www.leadshine.com
Twisted Wires............................................................................................11
CableShielding.........................................................................................11
SystemGrounding.....................................................................................11
PowerSupplyConnection.........................................................................12
5. Tuningtheservo....................................................................................................12
Testingtheservo.................................................................................................12
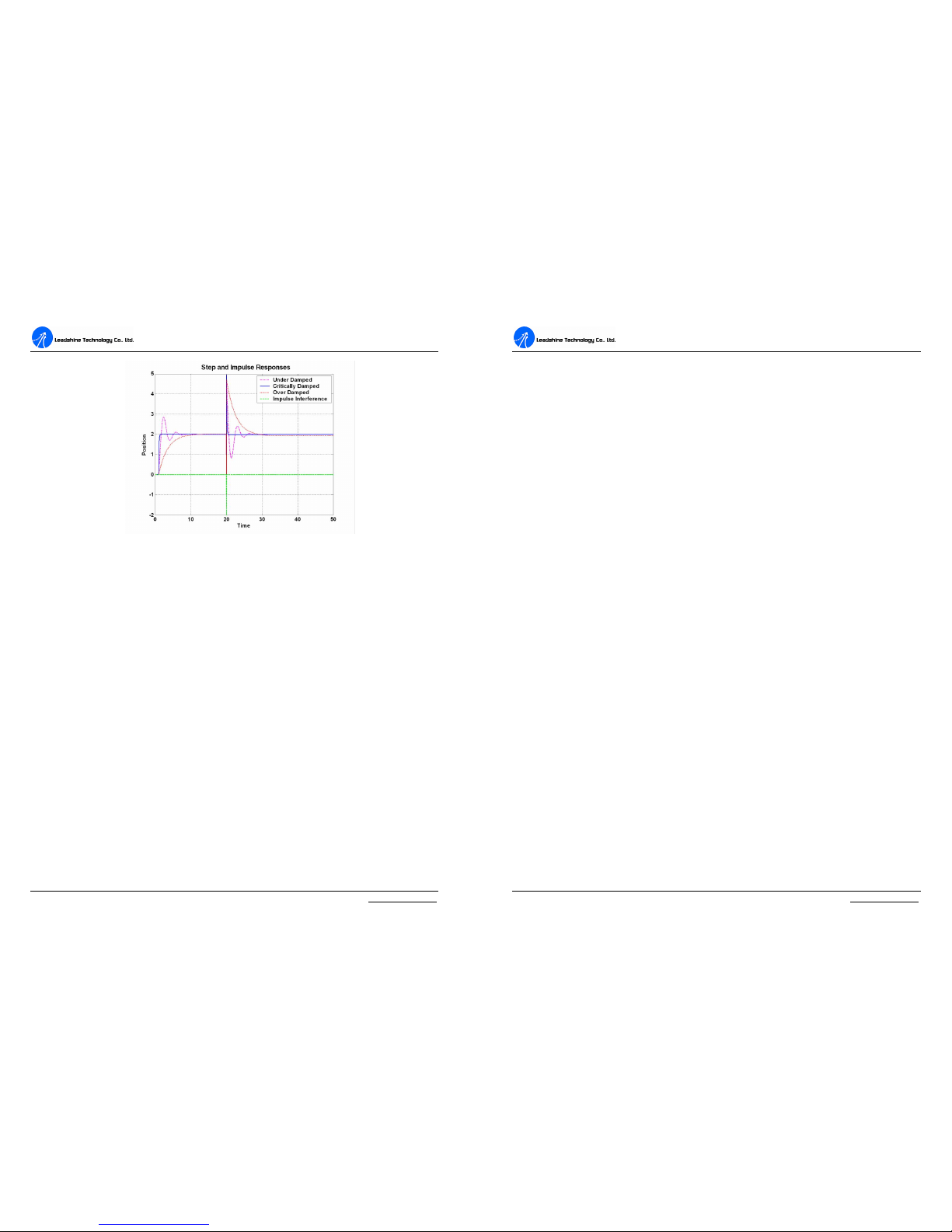
TuningtheServo................................................................................................13
6. PCwindowbasedTuningUsingProTuner...........................................................15
Introduction........................................................................................................15
SoftwareInstallation..........................................................................................15
RS232 Interface Connection..............................................................................19
Testingtheservo.................................................................................................20
SoftwareIntroduction.........................................................................................21
ProTunerMain Window............................................................................21
ComConfig Window................................................................................22
ServoTuning......................................................................................................30
Position LoopIntroduction.......................................................................30
Position aroundVelocity...........................................................................31
Position aroundTorque.............................................................................31
Position LoopTuning................................................................................32
7. UsingTips.............................................................................................................40
SequenceChartofControlSignals....................................................................40
ProtectionFunctions...........................................................................................40
Over-currentProtection.............................................................................41
Over-voltageProtection............................................................................41
PhaseErrorProtection...............................................................................41
EncoderErrorProtection...........................................................................41
Position FollowingErrorProtection.........................................................41
ProtectionIndications................................................................................42